Você também pode gostar
- Manual de serviço para reparação de transmissão de lavadoraDocumento66 páginasManual de serviço para reparação de transmissão de lavadoramarcojone1326100% (12)
- Cálculo NPSH bombaDocumento4 páginasCálculo NPSH bombaJorge MártiresAinda não há avaliações
- Teoria Da Elasticidade - Notas PDFDocumento2 páginasTeoria Da Elasticidade - Notas PDFjubirandaAinda não há avaliações
- Resistência Dos MateriaisDocumento27 páginasResistência Dos MateriaisMaicon PaskaAinda não há avaliações
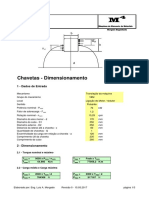
- Chaveta 1652916656Documento3 páginasChaveta 1652916656Saulo UainerAinda não há avaliações
- Calculo Da Espessura de Parede de TubosDocumento6 páginasCalculo Da Espessura de Parede de TubosSantendSantend100% (1)
- Orçamento elétrico planilhaDocumento6 páginasOrçamento elétrico planilhaRoger ISiAinda não há avaliações
- Análise modal de sistema 2DOFDocumento14 páginasAnálise modal de sistema 2DOFThiago BentoAinda não há avaliações
- Dimensionamento de Eixo (CEMA 7 Ed.)Documento3 páginasDimensionamento de Eixo (CEMA 7 Ed.)Michel Augusto Villa100% (1)
- 01 - Lista Exercicio Torcao - Gabarito PDFDocumento2 páginas01 - Lista Exercicio Torcao - Gabarito PDFadriene2118Ainda não há avaliações
- Método Dos Elementos FinitosDocumento136 páginasMétodo Dos Elementos FinitosLAPurcinaAinda não há avaliações
- Cálculo de perdas de carga em tubulação de água a 25°CDocumento9 páginasCálculo de perdas de carga em tubulação de água a 25°CManuella AlvesAinda não há avaliações
- Cálculo de torque de parafusos de potênciaDocumento9 páginasCálculo de torque de parafusos de potênciafelipe anastacioAinda não há avaliações
- Dimensionamento Viga Metálica Perfil VSDocumento12 páginasDimensionamento Viga Metálica Perfil VSLuís Felipe TrentoAinda não há avaliações
- Calc Moinho de BolasDocumento3 páginasCalc Moinho de BolasadilsonrodriguesAinda não há avaliações
- Determinação do sistema de hidrantes em edificaçãoDocumento26 páginasDeterminação do sistema de hidrantes em edificaçãoDaliton CordaçoAinda não há avaliações
- Cálculo NBR 11213Documento6 páginasCálculo NBR 11213sidneyg12Ainda não há avaliações
- Dimensionamento Das Bombas - Ms Projetos IndustriaisDocumento37 páginasDimensionamento Das Bombas - Ms Projetos IndustriaisPauloHenriqueAinda não há avaliações
- Regras e Tabelas para Projetos e FabricaçãoDocumento53 páginasRegras e Tabelas para Projetos e FabricaçãoRafael Giordani BeckerAinda não há avaliações
- Calculo Equipamento - PDV1536Documento8 páginasCalculo Equipamento - PDV1536Eleandro Joaquim100% (1)
- Dimensionamento de espessador para suspensão de 240 g/LDocumento11 páginasDimensionamento de espessador para suspensão de 240 g/LUlissesbranAinda não há avaliações
- Dimensional Conj - Motorbomba PoçoDocumento8 páginasDimensional Conj - Motorbomba PoçoFlávio LeiteAinda não há avaliações
- Michell BankiDocumento18 páginasMichell BankiHector Daniel Casique BojorquezAinda não há avaliações
- Planejamento Trocador CalorDocumento12 páginasPlanejamento Trocador CalorWillianBoneliAinda não há avaliações
- 04 - Dimensionamento de Pecas Estruturais de Aco - Introducao - Pecas TracionadasDocumento20 páginas04 - Dimensionamento de Pecas Estruturais de Aco - Introducao - Pecas TracionadasMona CostaAinda não há avaliações
- Cálculo de placa de base articulada AISC LRFDDocumento11 páginasCálculo de placa de base articulada AISC LRFDfeernandobAinda não há avaliações
- Cálculo do torque de prisioneiros de Cam-SetDocumento1 páginaCálculo do torque de prisioneiros de Cam-Setthiagorep17Ainda não há avaliações
- Verificação de perfil laminado ao corteDocumento19 páginasVerificação de perfil laminado ao corteAnonymous B6ewOobgzgAinda não há avaliações
- Lavador Venturi para remoção de particulados em correntes gasosasDocumento8 páginasLavador Venturi para remoção de particulados em correntes gasosas36362413Ainda não há avaliações
- VigasDocumento21 páginasVigasCLAUDIO RODRIGUES DA SILVA JUNIORAinda não há avaliações
- Qualidade em Eletrodos MagmaDocumento12 páginasQualidade em Eletrodos Magmawesley59Ainda não há avaliações
- ExercíciosDocumento14 páginasExercíciosClaimir GuinzelliAinda não há avaliações
- CP-R-501 Criterios SeS Elaboracao Projetos Engenharia Rev 7Documento32 páginasCP-R-501 Criterios SeS Elaboracao Projetos Engenharia Rev 7Daiane IzaAinda não há avaliações
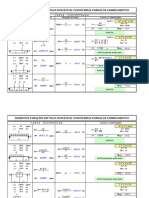
- Chaveiras quadradas e retangulares: dimensões e tolerânciasDocumento1 páginaChaveiras quadradas e retangulares: dimensões e tolerânciasFábio LessaAinda não há avaliações
- Ligação soldada tracionada dimensionadaDocumento10 páginasLigação soldada tracionada dimensionadagoiano20Ainda não há avaliações
- Exercícios Resolvidos de MolaDocumento51 páginasExercícios Resolvidos de Molaneydom88% (8)
- Dimensionamento de Transportador Helicoidal PDFDocumento6 páginasDimensionamento de Transportador Helicoidal PDFRoger CorottoAinda não há avaliações
- Triângulo de entrada e saída de turbinaDocumento3 páginasTriângulo de entrada e saída de turbinaThallys GabrielAinda não há avaliações
- Fundamentos Da Física Para A Ciência E Engenharia Dos MateriaisNo EverandFundamentos Da Física Para A Ciência E Engenharia Dos MateriaisAinda não há avaliações
- Manual PowerMax 45 HyperthermDocumento94 páginasManual PowerMax 45 HyperthermFernandoRocha100% (1)
- Lista de Exercícios: soluções - Unidade 3 - Osciladores harmônicosDocumento18 páginasLista de Exercícios: soluções - Unidade 3 - Osciladores harmônicosRicardo Negri0% (2)
- Lista de Exercícios: soluções - Unidade 3 - Osciladores harmônicosDocumento18 páginasLista de Exercícios: soluções - Unidade 3 - Osciladores harmônicosRicardo Negri0% (2)
- Lista de Exercícios: soluções - Unidade 3 - Osciladores harmônicosDocumento18 páginasLista de Exercícios: soluções - Unidade 3 - Osciladores harmônicosRicardo Negri0% (2)
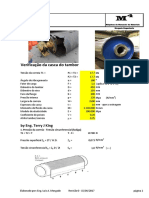
- Máquinas de Manuseio de Materiais - Verificação da Casca do TamborDocumento4 páginasMáquinas de Manuseio de Materiais - Verificação da Casca do TamborJuarez LeiteAinda não há avaliações
- Lista 08 - Sistemas LinearesDocumento3 páginasLista 08 - Sistemas LinearesLeonardo MartinsAinda não há avaliações
- Slides - Maquinas Assincronas 25-05-20 (V3) - Parte 02 - Exercicios - AlunosDocumento63 páginasSlides - Maquinas Assincronas 25-05-20 (V3) - Parte 02 - Exercicios - AlunosFagner SantanaAinda não há avaliações
- Elevador CanecasDocumento46 páginasElevador CanecasDavid SoaresAinda não há avaliações
- Teste Avaliação Físico-Química 9o AnoDocumento5 páginasTeste Avaliação Físico-Química 9o AnoIsabel De Melo Carneiro100% (1)
- Cálculo de Rolamentos-ModeloDocumento30 páginasCálculo de Rolamentos-ModeloFernando HumbertoAinda não há avaliações
- Projeto Mecânico de Um Redutor de Engrenagens Sem-Fim Numa Esteira Transportadora InclinadaDocumento62 páginasProjeto Mecânico de Um Redutor de Engrenagens Sem-Fim Numa Esteira Transportadora InclinadaFabrício NettoAinda não há avaliações
- Memória de Cálculo TrabalhoDocumento4 páginasMemória de Cálculo TrabalhoBruno CostaAinda não há avaliações
- SEW Acionamento Transp CorreiaDocumento5 páginasSEW Acionamento Transp CorreiaLeonardo SivieroAinda não há avaliações
- Bloco 4 EstacasDocumento1 páginaBloco 4 Estacascvcsouzahotmail.comAinda não há avaliações
- Lista 02 2021 Métodos NuméricosDocumento4 páginasLista 02 2021 Métodos Numéricosvinicius.camattaAinda não há avaliações
- Resistência de MateriaisDocumento10 páginasResistência de MateriaisMexaxronAinda não há avaliações
- Cálculo de Engrenamento 05Documento5 páginasCálculo de Engrenamento 05Daniel Barbosa da SilvaAinda não há avaliações
- Análise de dados de teste de poçoDocumento5 páginasAnálise de dados de teste de poçoEder MendesAinda não há avaliações
- Curvas características de bombas centrífugasDocumento18 páginasCurvas características de bombas centrífugasMichael CamargoAinda não há avaliações
- Aula 9 - Revisão e LeakageDocumento30 páginasAula 9 - Revisão e LeakageslipcoutAinda não há avaliações
- Primeira Avaliação POI PDFDocumento1 páginaPrimeira Avaliação POI PDFConta Conta GoogleAinda não há avaliações
- Cálculo NuméricoDocumento3 páginasCálculo NuméricoBárbara CarvalhoAinda não há avaliações
- Estática - BeerDocumento45 páginasEstática - Beermr.diih100% (1)
- Controle de Vibrações: Atividade 28/05/2020Documento4 páginasControle de Vibrações: Atividade 28/05/2020Maikon CosmoAinda não há avaliações
- Vibrações mecânicas - Lista de exercícios UNIS-MGDocumento2 páginasVibrações mecânicas - Lista de exercícios UNIS-MGJonathanNeryAinda não há avaliações
- Cálculo de tensão, flecha e trabalho de uma mola helicoidalDocumento2 páginasCálculo de tensão, flecha e trabalho de uma mola helicoidalLucas CardosoAinda não há avaliações
- Graneleiro DimensionamentoDocumento11 páginasGraneleiro DimensionamentoCarlos ZanellaAinda não há avaliações
- Dimensionamento de eixo à flexão - TorçãoDocumento3 páginasDimensionamento de eixo à flexão - TorçãoRoberto Kasakevicius AcquistoAinda não há avaliações
- Questo 01Documento3 páginasQuesto 01marcelo canedoAinda não há avaliações
- Resolução Exercícios Cap2 PDFDocumento5 páginasResolução Exercícios Cap2 PDFMarcos GutihaAinda não há avaliações
- Formula 3Documento3 páginasFormula 3Filipe MirandaAinda não há avaliações
- Introdução à Metalurgia da Soldagem - Classificação dos ProcessosDocumento1 páginaIntrodução à Metalurgia da Soldagem - Classificação dos ProcessosFilipe MirandaAinda não há avaliações
- Plano de Trabalho - Metalurgia Da SoldagemDocumento4 páginasPlano de Trabalho - Metalurgia Da SoldagemFilipe MirandaAinda não há avaliações
- Formul 4Documento1 páginaFormul 4Filipe MirandaAinda não há avaliações
- Formula 1Documento1 páginaFormula 1rogenheiro99Ainda não há avaliações
- UFJF 2018 TCC Caio-Souza-JunqueiraDocumento72 páginasUFJF 2018 TCC Caio-Souza-JunqueiraFernando Henrique OrleansAinda não há avaliações
- TCC AMORTECEDOR FinalDocumento50 páginasTCC AMORTECEDOR FinalFilipe MirandaAinda não há avaliações
- Sistemas Vibratórios: Um Enfoque Da Solução Dinâmica Da Matriz de TransferênciaDocumento139 páginasSistemas Vibratórios: Um Enfoque Da Solução Dinâmica Da Matriz de TransferênciaFilipe MirandaAinda não há avaliações
- Vibrações Forçadas em Vigas sob Força AxialDocumento77 páginasVibrações Forçadas em Vigas sob Força AxialFilipe MirandaAinda não há avaliações
- 2009 PaulodeTarsoSalvianoFilhoDocumento111 páginas2009 PaulodeTarsoSalvianoFilhoFilipe MirandaAinda não há avaliações
- Jacon Neto Adriano TCCDocumento53 páginasJacon Neto Adriano TCCFilipe MirandaAinda não há avaliações
- Análise Teórica e Simulação Computacional de AbsorvedoresDocumento6 páginasAnálise Teórica e Simulação Computacional de AbsorvedoresPplegal PplegalpplegalAinda não há avaliações
- Con 2016 1094Documento9 páginasCon 2016 1094Filipe MirandaAinda não há avaliações
- Critérios de Falhas - Fadiga PDFDocumento82 páginasCritérios de Falhas - Fadiga PDFBolota MonteiroAinda não há avaliações
- Impacto da taxa de resfriamento e tratamento criogênico na tenacidade do aço ABNT D2Documento78 páginasImpacto da taxa de resfriamento e tratamento criogênico na tenacidade do aço ABNT D2Filipe Miranda100% (1)
- Parafusos 2015Documento49 páginasParafusos 2015Filipe MirandaAinda não há avaliações
- Redução de carga inercial em sistemas mecânicosDocumento7 páginasRedução de carga inercial em sistemas mecânicosFilipe MirandaAinda não há avaliações
- Desenho técnico fundamentosDocumento108 páginasDesenho técnico fundamentosmjsouzasjcAinda não há avaliações
- Fenômenos de Transporte III-AULA 5 - 2021Documento72 páginasFenômenos de Transporte III-AULA 5 - 2021Gleison Alexandre Rufino dos SantosAinda não há avaliações
- Enquadramento Comando de VálvulasDocumento4 páginasEnquadramento Comando de VálvulasRafael Canizares ChiarandiAinda não há avaliações
- PV 170223Documento1 páginaPV 170223Jailson SilvaAinda não há avaliações
- Proporcionalidade direta em situações do 6o anoDocumento4 páginasProporcionalidade direta em situações do 6o anoMarilia Rocha100% (1)
- Teste Pureza Água MultímetroDocumento3 páginasTeste Pureza Água MultímetroAnonymous CNf01J5Ainda não há avaliações
- Modelo Shell BauDocumento2 páginasModelo Shell BauilumideiasAinda não há avaliações
- Fundamentos de Máquinas ElétricasDocumento36 páginasFundamentos de Máquinas Elétricasbpvascohotmail.comAinda não há avaliações
- Catalogo Da Urbe de Andaime Suspenso Eletrico LTD 630Documento11 páginasCatalogo Da Urbe de Andaime Suspenso Eletrico LTD 630FranciscoFaraAinda não há avaliações
- CP - Pi 43 - Thunder - BF0035 (505.0094-022) - R04Documento61 páginasCP - Pi 43 - Thunder - BF0035 (505.0094-022) - R04Isaque Elias CorreiaAinda não há avaliações
- Processos de Soldagem PoliméricaDocumento2 páginasProcessos de Soldagem PoliméricaFabrício SouzaAinda não há avaliações
- MF Engine Genuine 15w40 v01 IhDocumento2 páginasMF Engine Genuine 15w40 v01 IhJoãoCarlosDaSilvaBrancoAinda não há avaliações
- Curso Básico de Eletrônica Digital Parte 2Documento7 páginasCurso Básico de Eletrônica Digital Parte 2Thiago_jry100% (2)
- Complete sequências e atividades de atenção e memóriaDocumento11 páginasComplete sequências e atividades de atenção e memóriaTayná AparecidaAinda não há avaliações
- TERMORREGULAÇÃODocumento35 páginasTERMORREGULAÇÃOAnnajô Mauriz100% (1)
- Aplicativo de TV Paga No Xbox 360 Dá Acesso A 300 Canais de TV - GPS - Pezquiza.com GPS - PezquizaDocumento3 páginasAplicativo de TV Paga No Xbox 360 Dá Acesso A 300 Canais de TV - GPS - Pezquiza.com GPS - PezquizakelpiusAinda não há avaliações
- Propriedades e aplicações do alumínio e suas ligasDocumento56 páginasPropriedades e aplicações do alumínio e suas ligasarthur tavaresAinda não há avaliações
- Painel de Média Tensão projetoDocumento14 páginasPainel de Média Tensão projetoPaulo VieiraAinda não há avaliações
- Avaliação de Processos de Software G-NívelDocumento2 páginasAvaliação de Processos de Software G-NívelTiago BonamigoAinda não há avaliações
- Bitcoin: Referencial TeóricoDocumento7 páginasBitcoin: Referencial TeóricoVitor LasmarAinda não há avaliações
- Aparelhagem de MPDocumento5 páginasAparelhagem de MPMaurrizzyWestonLanclacheJotamoAinda não há avaliações
- Carga, Força, Campo, Potencial e Trabalho ElétricoDocumento14 páginasCarga, Força, Campo, Potencial e Trabalho ElétricoClaudioprofessor1Ainda não há avaliações
- Fibra OpticaDocumento7 páginasFibra OpticaPatrícia NascimentoAinda não há avaliações
- Ocorrência de Hidrocarbonetos em MoçambiqueDocumento2 páginasOcorrência de Hidrocarbonetos em MoçambiqueBrunoSamuelAge100% (4)
- C++ GUI Programando Com Qt4, Seguda EdiçãoDocumento45 páginasC++ GUI Programando Com Qt4, Seguda EdiçãoPizzaria HabinosAinda não há avaliações
- Meios Não Físicos de Transmissão de DadosDocumento24 páginasMeios Não Físicos de Transmissão de DadosRaimunda Branco100% (1)