Você também pode gostar
- Instrução Uso Familia Icatu Português MP05830X Rev02 1019Documento142 páginasInstrução Uso Familia Icatu Português MP05830X Rev02 1019tsf2012100% (1)
- Avaliação de Sistemas de Medição by Cristina WerkemaDocumento110 páginasAvaliação de Sistemas de Medição by Cristina Werkematsf2012Ainda não há avaliações
- Física Experimental III - Engenharia Elétrica PDFDocumento13 páginasFísica Experimental III - Engenharia Elétrica PDFtsf2012Ainda não há avaliações
- WEG Sca06 Manual de Programacao 10000662686 1.4x Manual Portugues BR PDFDocumento106 páginasWEG Sca06 Manual de Programacao 10000662686 1.4x Manual Portugues BR PDFPaulo Cesar ChemelloAinda não há avaliações
- Constellation 25 390Documento3 páginasConstellation 25 390Waldir Jesús Rodríguez Juárez100% (2)
- Catálogo de Peças Do Motor MWM 4.10TDocumento82 páginasCatálogo de Peças Do Motor MWM 4.10TRômulo Matildes100% (3)
- B Braun SpaceDocumento8 páginasB Braun Spacetsf2012Ainda não há avaliações
- Aula 01-Estrategia Concursos - SGBD MYSQlDocumento81 páginasAula 01-Estrategia Concursos - SGBD MYSQltsf20120% (1)
- Como Fazer A Resenha PDFDocumento2 páginasComo Fazer A Resenha PDFtsf2012100% (1)
- TTL CmosDocumento7 páginasTTL CmosddudaAinda não há avaliações
- Dispositivo de Controle Usando o TelefoneDocumento9 páginasDispositivo de Controle Usando o TelefonebakaninhaAinda não há avaliações
- Manual grmp03 Gip 4 PDFDocumento59 páginasManual grmp03 Gip 4 PDFfamanget-1Ainda não há avaliações
- Fiat Acelerador Eletronico e Comum Manual de ReparosDocumento98 páginasFiat Acelerador Eletronico e Comum Manual de ReparosValerio Alves SantanaAinda não há avaliações
- Manual de Instalacao Monitor de Rotação PDFDocumento3 páginasManual de Instalacao Monitor de Rotação PDFRonaldoegeAinda não há avaliações
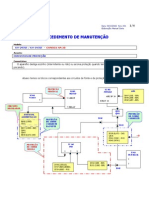
- Procedimento de Manuten o SONY KV2970T KV3470TDocumento4 páginasProcedimento de Manuten o SONY KV2970T KV3470TAdir Figueiredo0% (1)
- Art. N.º 3214000ptDocumento147 páginasArt. N.º 3214000ptJoão PimentelAinda não há avaliações
- Tabela Oppen 07-11-23Documento6 páginasTabela Oppen 07-11-23Fernando Erick SilvaAinda não há avaliações
- Evolução Do Computador ModernoDocumento32 páginasEvolução Do Computador ModernoLeonardo Costa100% (1)
- Manual Injepro - S8000Documento176 páginasManual Injepro - S8000Alex RodriguesAinda não há avaliações
- Caixa de Fusíveis e Relés - Tratores Com Estação Aberta - tm801554 - Service ADVISOR™Documento3 páginasCaixa de Fusíveis e Relés - Tratores Com Estação Aberta - tm801554 - Service ADVISOR™fabiorochaarrudaAinda não há avaliações
- UntitledDocumento98 páginasUntitledJose Luís Saraiva duransAinda não há avaliações
- Lista de Erros BoschDocumento66 páginasLista de Erros BoschIrlon MacielAinda não há avaliações
- Tabela de Precos at 2020 PwebDocumento42 páginasTabela de Precos at 2020 PwebLuís CamiloAinda não há avaliações
- Apresentação Ferramenta ATS-Equipamentos 2016 - 10Documento11 páginasApresentação Ferramenta ATS-Equipamentos 2016 - 10RuanWheelingAinda não há avaliações
- 07 Tipos de Ligação Dos TransformadoresDocumento25 páginas07 Tipos de Ligação Dos TransformadoresGabriel GustavoAinda não há avaliações
- Memorial Aumento de Carga DonarioDocumento6 páginasMemorial Aumento de Carga DonarioConstrutora Nova GeraçaoAinda não há avaliações
- Boxer MinibusDocumento18 páginasBoxer MinibusAnderson FerrazAinda não há avaliações
- Check List Caminhão Comboio - OperadorDocumento2 páginasCheck List Caminhão Comboio - OperadorLuisHenriqueCarlos50% (2)
- Cti - 183 Instrumentos de Medição Utilizados Nos ElevadoresDocumento1 páginaCti - 183 Instrumentos de Medição Utilizados Nos ElevadoresRenato FreitasAinda não há avaliações
- Planilha de Gastos Blog Pausa Pra CriatividadeDocumento24 páginasPlanilha de Gastos Blog Pausa Pra CriatividadeAna Caroline LimaAinda não há avaliações
- Anexo I LivroIIDocumento91 páginasAnexo I LivroIIRhayanne RibeiroAinda não há avaliações
- VIVO Handbook - Unit5 - Instalação Da RRU No APM30HDocumento16 páginasVIVO Handbook - Unit5 - Instalação Da RRU No APM30HCristiano MartinsAinda não há avaliações
- ZLJ5461JQZV3 CaminhaoZTC800V532Documento389 páginasZLJ5461JQZV3 CaminhaoZTC800V532Rubens CarlosAinda não há avaliações
- Manual Serviços Refrigeradores DM90X DM91XDocumento122 páginasManual Serviços Refrigeradores DM90X DM91XFrancisco CassioAinda não há avaliações
- Zafira - Especificacoes TecnicasDocumento47 páginasZafira - Especificacoes Tecnicasge1986Ainda não há avaliações
- Módulo 1 - INTRODUÇÃO - PGMDocumento64 páginasMódulo 1 - INTRODUÇÃO - PGMVitoria Dos AnjosAinda não há avaliações