Escolar Documentos
Profissional Documentos
Cultura Documentos
Analise Modal
Enviado por
Lucas HenriqueTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Analise Modal
Enviado por
Lucas HenriqueDireitos autorais:
Formatos disponíveis
UNIVERSIDADE DE SÃO PAULO
ESCOLA DE ENGENHARIA DE SÃO CARLOS
DEPARTAMENTO DE ENGENHARIA MECÂNICA
SEM 5766 – ANÁLISE MODAL DE ESTRUTURAS
Aula # 2 – Sistemas com N GDL
SEM 5766 – Análise Modal de Estruturas 1 Prof. Paulo S. Varoto
Objetivos
Objetivo principal desta aula é apresentar e discutir a resposta livre e forçada
harmônica de sistemas discretos possuindo múltiplos graus de liberdade
Serão cobertos os seguintes principais tópicos:
• Resposta livre
• Resposta forçada harmônica
• Resposta forçada harmônica – conceito de FRF
• Propriedades da FRF
Bibliografia:
SEM 5766 – Análise Modal de Estruturas 2 Prof. Paulo S. Varoto
PARTE I
SISTEMAS COM N GDL
RESPOSTA LIVRE
SEM 5766 – Análise Modal de Estruturas 3 Prof. Paulo S. Varoto
Sistemas com N GDL – Resposta Livre
O modelo de N GDL obedece à seguinte equação de movimento:
Onde:
Matrizes simétricas
• [M] – Matriz de massa de ordem N !
• [K] – Matriz de rigidez
• [C] – Matriz de amortecimento
• {f (t)} – Vetor de forças externas
• {u} – vetor de deslocamentos físicos
SEM 5766 – Análise Modal de Estruturas 4 Prof. Paulo S. Varoto
Cont. ...
{f (t)} = {0}
Para o estudo da vibração livre não amortecida:
[C] = [0]
E com isto temos:
E a solução desta última equação para condições iniciais não nulas é dada por:
Onde {φ} é um vetor de ordem N, de valores independentes da variável tempo e s
um número complexo. Substituição desta solução na equação do movimento livre dá
[[K] + s2 [ M ]]{φ}e st = {0}
SEM 5766 – Análise Modal de Estruturas 5 Prof. Paulo S. Varoto
Cont. ...
Como est ≠ 0 esta última equação pode ainda ser escrita como:
[[K] − λ[ M ]]{φ}= {0} λ = −s2
Que na verdade constitui-se num sistema homogêneo do tipo: [ A]{x} = {0}
Rearranjando de forma mais conveniente temos:
[ A]{x} = λ[B]{x}
[K]{φ} = λ[ M ]{φ}
Ou ainda:
[D]{x} = λ{x}
−1
[ M ] [K]{φ} = λ{φ}
matriz dinâmica
SEM 5766 – Análise Modal de Estruturas 6 Prof. Paulo S. Varoto
Cont. ...
Importantíssimo:
As variáveis λ e {φ} são denominadas de autovalores e autovetores do problema
da vibração livre não amortecida. Estes parâmetros estão diretamente relacionados
Com as propriedades físicas do sistema, as freqüências naturais não amortecidas e
os chamados modos normais ou naturais de vibração ! Portanto, a determinação
Destas propriedades fundamentais do sistema de N GDL reside na solução de um
autoproblema generalizado (generalized eigenproblem) ! [ A]{x} = λ[B]{x}
Retomemos a equação:
[[K] − λ[ M ]]{φ}= {0}
Esta última equação possui solução não trivial se e somente se:
[K] − λ[ M ] = {0}
SEM 5766 – Análise Modal de Estruturas 7 Prof. Paulo S. Varoto
Cont. ...
Na forma polinomial:
N
∑ ap λ p = 0
p=1
Onde os coeficientes a1 ... aN dependem das características de massa e rigidez. Esta
última equação (ou a anterior) denomina-se equação característica do sistema com
N GDL e suas raízes são na verdade os autovalores do sistema em estudo. O p-ésimo
autovalor do sistema relaciona-se com a correspondente freqüência natural não
amortecida através da seguinte relação
ω n = ±i λ p
p
Onde: i = −1
SEM 5766 – Análise Modal de Estruturas 8 Prof. Paulo S. Varoto
Cont. ...
Determinamos assim o chamado Modelo Modal do sistema conservativo:
" %
" ω1 0 0 % λ1 0 0
$ ' $ '
$ 0 ω2 0 ' $$ 0 λ2 0 '
'
[ω n ] = $ '=
$ ' $ '
$ '
$ 0 0 ωN ' $ 0 0 λN '
# & # &
# φ φ12 … φ1N &
% 11 (
% φ21 φ22 … φ2N (
[Φ ] = [{φ}1 ,{φ}2 ,...,{φ}N ] = % (
% (
% φ
N 1 φ1N … φ NN (
$ '
SEM 5766 – Análise Modal de Estruturas 9 Prof. Paulo S. Varoto
Relações de Ortogonalidade
São relações importantes entre modos normais de um mesmo sistema. Escrevemos
inicialmente para modos r e s distintos
[[K] − ω r2 [ M ]]{φ}r = {0} r-ésimo modo
[[K] − ω s2 [ M ]]{φ}s = {0} s-ésimo modo
Agora, pré-multiplicamos a primeira equação por {φ}sT e pós-multiplicamos a
transposta da segunda por {φ}r obtendo assim
{φ}Ts [[K] − ω r2 [ M ]]{φ}r = {0} r-ésimo modo
{φ}Ts [[K] − ω s2 [ M ]]{φ}r = {0} s-ésimo modo
SEM 5766 – Análise Modal de Estruturas 10 Prof. Paulo S. Varoto
Cont. ...
Estas duas equações podem ser combinadas fornecendo:
(ω r2 − ω s2 ){φ}Ts [ M ]{φ}r = {0}
E se agora tivermos ωr ≠ ωs esta última equação será satisfeita se e somente se:
{φ}Ts [ M ]{φ}r = {0} r ≠ s
{φ}Ts [K]{φ}r = {0} r≠s
Importantíssimo:
Estas duas relações matriciais acima constituem-se nas relações de
ortogonalidade entre os modos normais de vibração em relação às
matrizes de massa e rigidez, respectivamente !
SEM 5766 – Análise Modal de Estruturas 11 Prof. Paulo S. Varoto
Cont. ...
Para o caso especial onde ωr ≠ ωs temos:
{φ}Tr [ M ]{φ}r = M r r=s
{φ}Tr [K]{φ}r = K r r=s
Estas duas últimas expressões definem os valores da massa modal Mr e rigidez modal
Kr (ou massa e rigidez generalizada) associadas ao r-ésimo modo normal de vibrar do
sistema com N GDL não amortecido valendo a seguinte relação:
{φ}Tr [K]{φ}r Kr
ω r2 = =
{φ}Tr [ M ]{φ}r Mr
SEM 5766 – Análise Modal de Estruturas 12 Prof. Paulo S. Varoto
Cont. ...
Generalizando em relação à matriz modal [Φ]:
[Φ ]T [ M ][Φ ]= diag[ M r ]
[Φ ]T [K][Φ ]= diag[K r ]
E os valores da massa modal podem ser usado para se obter os chamados
modos normais normalizados, da seguinte forma
1 [Ψ ]T [ M ][Ψ ]= [I ]
{ψ }r = {φ}r
Mr
[Ψ ]T [K][Ψ ]= [ω r2 ]
Vejamos alguns exemplos !
SEM 5766 – Análise Modal de Estruturas 13 Prof. Paulo S. Varoto
Cont. ...
Dois modos de vibrar de uma estrutura aeronáutica
Primeiro Modo
de flexão
Primeiro Modo
de torção
SEM 5766 – Análise Modal de Estruturas 14 Prof. Paulo S. Varoto
Cont. ...
Modos de flexão lateral e flexo-torção em chassi de veículo
SEM 5766 – Análise Modal de Estruturas 15 Prof. Paulo S. Varoto
Cont. ...
Modos acústicos em filtros do tipo “passa-alta”
SEM 5766 – Análise Modal de Estruturas 16 Prof. Paulo S. Varoto
Cont. ...
Modos acústicos e vibroacústicos em cavidades
SEM 5766 – Análise Modal de Estruturas 17 Prof. Paulo S. Varoto
Cont. ...
Na verdade o que fizemos até aqui foi apenas determinar o modelo modal do
sistema. Vamos agora escrever a solução para o movimento livre conservativo.
Retomemos a solução apresentada anteriormente
λr = −sr2
# − λr t − − λr t &
{u(t)}r = % ar e + br e ( {φ}r
$ '
ar e br
Ou ainda dependem
ω n = ±i λr das CIs !
r
# iω n t −iω n t &
{u(t)}r = % ar e r + br e r
( {φ}r
$ '
SEM 5766 – Análise Modal de Estruturas 18 Prof. Paulo S. Varoto
Cont. ...
Estas duas últimas expressões revelam que a resposta dinâmica do sistema é
controlada pela parcela dependente da variável tempo, que por sua vez depende
do autovalor λr e que por sua vez depende das características de [M] e [K] ! Se
ambas forem positivas definidas, todos os autovalores serão positivos e não nulos
e os correspondentes autovetores serão reais !
N
iω r t −iω r t
{u(t)} = ∑ (ar e + ar e ){φ}r
r =1
Esta última equação pode ser escrita como:
N
{u(t)} = ∑ {φ}r ηr
r =1
SEM 5766 – Análise Modal de Estruturas 19 Prof. Paulo S. Varoto
Cont. ...
Ou de forma compacta:
SUPERPOSIÇAO
{u} = [Φ ]{η} MODAL
x1 φ11 φ12 φ13
x2
φ21 φ22 φ23 + ...
= + +
φ32
x3 φ31 φ33
{x} = [Φ] {η} x1 = {φ}1 η1 x2 = {φ}2 η2 x3 = {φ}3 η3
SEM 5766 – Análise Modal de Estruturas 20 Prof. Paulo S. Varoto
PARTE II
SISTEMAS COM N GDL
RESPOSTA FORÇADA
• Resposta harmônica – conceito de FRF
• Conceito de anti-ressonância
• Modos Complexos
SEM 5766 – Análise Modal de Estruturas 21 Prof. Paulo S. Varoto
Sistemas com N GDL – Resposta Forçada Harmônica
Neste caso voltamos a equação:
Onde ω é a freqüência de excitação harmônica e {f0} o vetor de amplitudes. Como
solução adotamos a mesma usada no caso da vibração livre (por hipótese !)
{u} = [Φ ]{η}
Substituição na equação acima fornece:
SEM 5766 – Análise Modal de Estruturas 22 Prof. Paulo S. Varoto
Cont. ...
Pré-multiplicando esta última por [Φ]T:
[mr] [kr] {µ}
?
massa modal amort. modal rigidez modal excitação modal
Questão básica :
A mesma relação de ortogonalidade baseada no modelo modal
do sistema não amortecido que diagonaliza as matrizes de massa
e rigidez seria capaz de diagonalizar a matriz de amortecimento ?
Resp.: Se e somente se [C] for combinação entre [M] e [K] !
SEM 5766 – Análise Modal de Estruturas 23 Prof. Paulo S. Varoto
Cont. ...
Neste caso:
b
−1
[C] = [ M ] ∑ ab[[ M ] [K]]
b
E para o caso onde b = 0, 1 temos:
[C] = a0 [ M ] + a1[K]
Que é amplamente conhecido como amortecimento proporcional !
agora desacopla!!
[Φ ]T [C][Φ ] = a0 [mr ] + a1[kr ]
SEM 5766 – Análise Modal de Estruturas 24 Prof. Paulo S. Varoto
Cont. ...
Procedendo o desacoplamento obtemos agora um novo conjunto de equações:
[ M r ]{η}+[Cr ]{η}+[K r ]{η} = {µ} e i ω t
Que agora constitui-se num conjunto de equações desacopladas na chamada
coordenada modal ou normal η ! Para o r-ésimo modo de vibrar temos
ηr + 2 ς r ω r η r + ω r2 ηr = µr e i ω t
É importante notar que esta última equação é essencialmente a equação de
um sistema de 01 GDL, somente que não mais expressa na coordenada física
u(t) mas sim nas coordenadas modais η(t) ! Os parâmetros que aparecem nesta
equação correspondem aos parâmetros modais associados ao modo r e são
dados por:
SEM 5766 – Análise Modal de Estruturas 25 Prof. Paulo S. Varoto
Cont. ...
cr
ςr = Fator de amortecimento modal
2 kr mr
kr
ωr = Freqüência natural não amortecida
mr
1
µr = {φ}Tr { f0 } Força de excitação modal
mr
SEM 5766 – Análise Modal de Estruturas 26 Prof. Paulo S. Varoto
Cont. ...
[ M r ]{η}+[Cr ]{η}+[K r ]{η} = {µ} e i ω t
Espaço Físico
m1 + m2 + m3 + …+ mN
SEM 5766 – Análise Modal de Estruturas 27 Prof. Paulo S. Varoto
Cont. ...
Retomando agora a equação do r-ésimo modo temos:
ηr + 2 ς r ω r η r + ω r2 ηr = µr e i ω t
Cuja solução pode ser expressa como:
ηr (t) = Qr eiω t
Substituição desta última na equação anterior fornece o seguinte valor para a
amplitude modal associada ao r-ésimo modo de vibrar do sistema
µr
Qr =
ω r2 − ω 2 + i 2 ς r ω r ω
SEM 5766 – Análise Modal de Estruturas 28 Prof. Paulo S. Varoto
Cont. ...
E a solução nas coordenadas físicas {u} é dada usando o conceito de superposição
modal ({u} = [Φ]{η}) ou seja:
T
N {ϕ }r {ϕ }r { f0 } eiωt
{ x} = ∑
r=1 mr (ω r2 − ω 2 + i 2 ς r ω r ω )
E desta última expressão podemos extrair a matriz de FRF do sistema
"# H (ω ) $% =
N {φ }r {φ }r
∑
r=1 mr (ω r2 − ω 2 + i 2 ς r ω r ω )
SEM 5766 – Análise Modal de Estruturas 29 Prof. Paulo S. Varoto
Cont. ...
O lado esquerdo da última equação pode ser expandido como
" H (ω ) H12 (ω ) … H1N (ω ) $
& 11 '
& H 21 (ω ) H 22 (ω ) … H 2 N (ω ) '
"# H (ω ) $% = & '
& '
& H N 1 (ω ) H N 2 (ω ) … H NN (ω ) '
# %
Sendo cada elemento Hij(ω) da matriz de FRF definido como:
Ui
H ij (ω ) = (ω ) FRF de Receptância
Fj
Onde Ui (ω) representa a resposta de deslocamento na coordenada i e Fj (ω) a força
aplicada na coordenada j, ambas no domínio da freqüência
SEM 5766 – Análise Modal de Estruturas 30 Prof. Paulo S. Varoto
Cont. ...
Esta última matriz destaca dois tipos de FRF:
Ui Diagonal principal de [H(ω)]
H ii (ω ) = (ω ) i = j denominada FRF de ponto,
Fi excitação e resposta no mesmo
ponto !
Elementos fora da diagonal
Ui principal de [H(ω)], são as
H ij (ω ) = (ω ) i ≠ j
Fi FRF de transferência, ou seja
excitação e resposta em pontos
distintos !
Princípio da Reciprocidade: H ij (ω ) = H ji (ω ) i ≠ j
SEM 5766 – Análise Modal de Estruturas 31 Prof. Paulo S. Varoto
Cont. ...
Se considerarmos, por exemplo um sistema possuindo apenas 02 GDL, escrevemos
φ11φ11
H 11 (ω ) = +
2 2
m1 (ω1 − ω + i 2ς 1ω1ω ) 1o Modo
φ21φ21
+
m2 (ω22 − ω 2 + i 2ς 2ω2ω ) 2o Modo
φ11φ12
H 12 (ω ) = 2 2
+ 1o Modo
m1 (ω1 − ω + i 2ς 1ω1ω )
φ21φ22
+
m2 (ω22 − ω 2 + i 2ς 2ω2ω ) 2o Modo
SEM 5766 – Análise Modal de Estruturas 32 Prof. Paulo S. Varoto
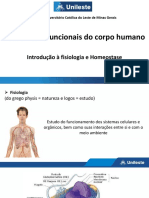
Cont. ...
1
0.1 H11 (ω )
Magnitude [m/N]
0.01 FRF
0.001
4
1 10
5 Modo 2
1 10 Modo 1
6
1 10
7 1
1 10
0 50 100
0.1
150 H12 (ω )
Frequência [rad/s]
Magnitude [m/N] 0.01
0.001
4
1 10
1 10
5 Modo 2 Modo 1
Anti-ressonância 6
1 10
0 50 100 150
Frequência [rad/s]
SEM 5766 – Análise Modal de Estruturas 33 Prof. Paulo S. Varoto
Caso Geral – Amortecimento Não Proporcional
Consideremos agora o caso onde a matriz [C] não obedece as relações de
ortogonalidade em relação aos modos naturais do sistema conservativo.
As equações agora não mais são desacopladas e para a solução usamos a seguinte
equação auxiliar
Estas duas últimas equações podem ser combinadas em um sistema de equações
nas variáveis físicas da seguinte forma
SEM 5766 – Análise Modal de Estruturas 34 Prof. Paulo S. Varoto
Cont. ...
[B]{u} = {P}
[ A]{u}+
onde
! [C] [ M ] $ " [K] [0] % ! x $ !# { f } %#
[ A] = # & [B] = $ ' {u} = " % {P} = "
0
&
#" [ M ] [0] &% $# [0] −[ M ] '& # x & #$ {0} #'
A equação acima recebe o nome de modelo de estado enquanto que as
matrizes [A] e [B] e o vetor {u} são respectivamente as matrizes e vetor de
estados do sistema com amortecimento não proporcional ! É importante notar
que embora as matrizes de estado ainda sejam simétricas, a equação resultante
tem sua ordem dobrada, ou seja, 2N para apenas N GDL
SEM 5766 – Análise Modal de Estruturas 35 Prof. Paulo S. Varoto
Cont. ...
Para a solução do modelo de estado assumimos inicialmente
!# {X} %#
st st
{u(t)} = " & e = {U}e
#$ s{X} #'
Que quando substituída na equação de estados fornece
!" s[ A] + [B]#${ψ } = {0}
E esta última equação representa um autoproblema generalizado cuja solução
fornece um conjunto de 2N autovalores sr que podem ser reais ou complexos
conjugados. Para o caso de sistemas sub-amortecidos, estes serão sempre
complexos conjugados. Para os autovetores, escrevemos
" {Ψ } &
$ r $
{Ψ r } = # '
$% {Ψ r }sr $(
SEM 5766 – Análise Modal de Estruturas 36 Prof. Paulo S. Varoto
Cont. ...
e {Ψ r} é o autovetor complexo de ordem N correspondente ao espaço das
coordenadas físicas x. Como no caso anterior, temos condições de ortogonalidade e,
o desacoplamento ocorre usando-se
{u(t)} = [Ψ ']{q(t)}
E, seguindo um procedimento análogo ao caso de amortecimento proporcional,
temos um conjunto de 2N equações desacopladas
[ar ]{q(t)}+ [br ]{q(t)} = {0}
Cuja solução é dada por superposição modal
2N
sr t
{u(t)} = ∑ {ψ 'r }Qr e
r=1
SEM 5766 – Análise Modal de Estruturas 37 Prof. Paulo S. Varoto
Cont. ...
Valendo uma relação similar ao caso proporcional
{ψ *}Tr [K]{ψ }r kr
ω r2 = =
{ψ *}Tr [ M ]{ψ }r mr
Agora, para o caso da resposta forçada escrevemos
⎧{ f ( t )}⎫
[ A]{u } + [ B ]{u} = { f ' ( t )} { f ' ( t )} = ⎨ ⎬
⎩ { 0 } ⎭
Utilizando uma transformação de coordenadas similar ao caso com amortecimento
proporcional, temos
[ar ]{q ( t )} + [br ]{q( t )} = [Ψ ' ]T { f ' ( t )}
A qual representa um conjunto de 2N equações desacopladas !
SEM 5766 – Análise Modal de Estruturas 38 Prof. Paulo S. Varoto
Cont. ...
A equação diferencial para o r-ésimo modo é dada por
1 ⎧{ f ( t )}⎫
q r ( t ) − sr qr ( t ) = {Ψ ´}T ⎨ ⎬
ar ⎩ { 0 } ⎭
sendo
{ f ( t )} = { F } e iωt
Assumindo que a resposta assume a seguinte forma
{q( t )} = {Q } e iωt
Substituindo-se estas duas últimas expressões na equação acima temos como
solução
2N
⎛ 1 ⎞ 1 ⎧{ F }⎫ iω t
{u( t )} = ∑ {ψ 'r } ⎜⎜ ⎟⎟ {ψ 'r }T ⎨ ⎬ e
r =1 ⎝ iω − sr ⎠ ar ⎩ {0} ⎭
SEM 5766 – Análise Modal de Estruturas 39 Prof. Paulo S. Varoto
Cont. ...
Ou ainda 1
{φ 'r } = {ψ 'r }
ar
2N
⎛ 1 ⎞ T ⎧{ F }⎫ iω t
{u( t )} = ∑ {φ 'r } ⎜⎜ ⎟⎟ {φ 'r } ⎨
⎝ iω − sr ⎠
⎬ e
⎩ {0} ⎭
r =1
De onde pode-se extrair a FRF do sistema
N
⎛ φ jr φ kr φ * jr φ * kr
Xj ⎞
α jk (ω ) =
Fk
(ω ) = ∑
⎜ +
⎜ iω − sr iω − s* r
⎟
⎟
r =1 ⎝ ⎠
SEM 5766 – Análise Modal de Estruturas 40 Prof. Paulo S. Varoto
Cont. ...
Para o caso de amortecimento não proporcional, os modos de vibrar resultam
complexos !
REAL COMPLEXO
SEM 5766 – Análise Modal de Estruturas 41 Prof. Paulo S. Varoto
Você também pode gostar
- Bitzer - TREINAMENTO REFRIGERAÇÃO COMERCIALDocumento80 páginasBitzer - TREINAMENTO REFRIGERAÇÃO COMERCIALMaxymme Mendes de Melo100% (4)
- RES Naval Shiphandling CAP 2Documento15 páginasRES Naval Shiphandling CAP 2Bernardo Amorim Bastos100% (5)
- Manual PT HM 300-2Documento288 páginasManual PT HM 300-2CJCONSTANTE100% (1)
- 04-Incêndios FlorestaisDocumento71 páginas04-Incêndios FlorestaisPaulo100% (1)
- Manual Tecnico Split Wall GSW 7!9!12Documento53 páginasManual Tecnico Split Wall GSW 7!9!12Tatiana Portella100% (1)
- Cap 5Documento56 páginasCap 5Tev100% (1)
- Lista de Exercícios - 1 Ano - Recuperação - 3 BimestreDocumento4 páginasLista de Exercícios - 1 Ano - Recuperação - 3 BimestreGabrielle Gomes de FrançaAinda não há avaliações
- Aula 4-Soluções ReaisDocumento8 páginasAula 4-Soluções ReaisLarissa MeneghiniAinda não há avaliações
- AL 3.1 - Ondas - Absorção, Reflexão, Refração e Reflexão TotalDocumento4 páginasAL 3.1 - Ondas - Absorção, Reflexão, Refração e Reflexão Totaljoana100% (1)
- Livro NVS DiferenteDocumento336 páginasLivro NVS Diferenteleandro_freeAinda não há avaliações
- Revisão Química Parte 1 1 SerieDocumento43 páginasRevisão Química Parte 1 1 SerieAlexsander LimaAinda não há avaliações
- Analise Comparativa MisturasDocumento55 páginasAnalise Comparativa MisturasFayad2Ainda não há avaliações
- Lista Física MecânicaDocumento3 páginasLista Física MecânicaLeonardo Da Silva AlvesAinda não há avaliações
- Curso 230410 Aula 06 CeletrostaticaDocumento79 páginasCurso 230410 Aula 06 CeletrostaticaPaula LimaAinda não há avaliações
- Exercício 1 - 3º Ano - 19-03-21Documento1 páginaExercício 1 - 3º Ano - 19-03-21Lou MariaAinda não há avaliações
- Aula 1 - Bases Morfofuncionais Do Corpo Humano - EnfermagemDocumento22 páginasAula 1 - Bases Morfofuncionais Do Corpo Humano - EnfermagemIURI PIRESAinda não há avaliações
- Agressividade Do Ar e A Durabilidade Do ConcretoDocumento2 páginasAgressividade Do Ar e A Durabilidade Do ConcretoRafael RussoAinda não há avaliações
- A Ação Do Vento Nas Edificações-1Documento4 páginasA Ação Do Vento Nas Edificações-1Jorge BarbiAinda não há avaliações
- Aula05 GEO003 ExemplosIndicesfisicosDocumento15 páginasAula05 GEO003 ExemplosIndicesfisicosPedro BrandãoAinda não há avaliações
- 1 Ano 1bimestrea2Documento2 páginas1 Ano 1bimestrea2Ronan BarrosAinda não há avaliações
- Aula 3 - Lista de Exercícios FRXDocumento6 páginasAula 3 - Lista de Exercícios FRXJeferson Matias MartinsAinda não há avaliações
- Física II - Cap. 3 Oscilações e Ondas MecânicasDocumento81 páginasFísica II - Cap. 3 Oscilações e Ondas MecânicasrobefiAinda não há avaliações
- Resumo de CatáliseDocumento10 páginasResumo de CatáliseDavidson De Oliveira LimaAinda não há avaliações
- Apoio m8 Parte1Documento28 páginasApoio m8 Parte1Carlos SilvaAinda não há avaliações
- 2014efomm Matematica Fisica PDFDocumento17 páginas2014efomm Matematica Fisica PDFbrunoAinda não há avaliações
- 4 Ficha de Avaliação - 10ºanoDocumento4 páginas4 Ficha de Avaliação - 10ºanomaria jesusAinda não há avaliações
- Operações UnitáriasDocumento36 páginasOperações UnitáriasDanilo costaAinda não há avaliações
- Ficha - Revisões - FQ11 - 2021Documento2 páginasFicha - Revisões - FQ11 - 2021CentroCerto Centro de EstudosAinda não há avaliações
- NBR 5739 - Concreto - Ensaio de Compressão de Corpos de Prova CilindricosDocumento13 páginasNBR 5739 - Concreto - Ensaio de Compressão de Corpos de Prova CilindricosIgor RoygAinda não há avaliações
- Alumínio 5083FDocumento3 páginasAlumínio 5083FRafael WolfartAinda não há avaliações