Você também pode gostar
- Relatorio PID ItaloDocumento6 páginasRelatorio PID ItaloMkl JeffAinda não há avaliações
- Lab 07 (Presencial) - Controlador-Observador + LQR +LQGDocumento6 páginasLab 07 (Presencial) - Controlador-Observador + LQR +LQGGera BarbosaAinda não há avaliações
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- Relatório Eletrotécnica PDFDocumento22 páginasRelatório Eletrotécnica PDFMarco TeixeiraAinda não há avaliações
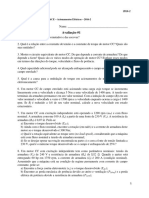
- Prova - Processos IndustriaisDocumento3 páginasProva - Processos IndustriaisAmanda SantosAinda não há avaliações
- 2 º Lista de ExercíciosDocumento3 páginas2 º Lista de ExercíciosElton Florentino100% (1)
- 3 - AletasDocumento7 páginas3 - AletasRenan Rosa FerreiraAinda não há avaliações
- Acionamentos Aula 01Documento48 páginasAcionamentos Aula 01mhulavas100% (1)
- Acionamentos 1 Lista de ExercíciosDocumento5 páginasAcionamentos 1 Lista de ExercíciosmariaAinda não há avaliações
- 1são Exemplos de Dispositivos de Proteção para Circuitos ElétricosDocumento10 páginas1são Exemplos de Dispositivos de Proteção para Circuitos ElétricosDiegoAinda não há avaliações
- Prova de Máquinas Elétricas 1Documento21 páginasProva de Máquinas Elétricas 1Levi VieiraAinda não há avaliações
- 2001 Provao EletricaDocumento28 páginas2001 Provao EletricaLuis Cláudio LAAinda não há avaliações
- Resolução Das Questões de AutomaçãoDocumento3 páginasResolução Das Questões de Automaçãojos luiz100% (1)
- Prática LaboratorialDocumento2 páginasPrática LaboratorialKleiber FerreiraAinda não há avaliações
- Revisão para Prova Projeto Predial 2Documento8 páginasRevisão para Prova Projeto Predial 2Matheus OliveiraAinda não há avaliações
- Relatório 04 - Retificador Monofásico de Meia OndaDocumento7 páginasRelatório 04 - Retificador Monofásico de Meia OndaArmando SusinAinda não há avaliações
- Problemas Sobre Quadripolos (2014)Documento3 páginasProblemas Sobre Quadripolos (2014)Alberto Chicava SecoAinda não há avaliações
- Questões Fator de PotenciaDocumento6 páginasQuestões Fator de PotenciarjsfplaAinda não há avaliações
- TermoparesDocumento70 páginasTermoparesHiroshi JpAinda não há avaliações
- Provas Enade - Tecnologia - em - Automacao - Industrial - 2011Documento32 páginasProvas Enade - Tecnologia - em - Automacao - Industrial - 2011Dylan HardAinda não há avaliações
- Exercicio InstrumentaçãoDocumento1 páginaExercicio InstrumentaçãoJonatan MachadoAinda não há avaliações
- Unifap Lista de Exercicios Cap 1 3 PDFDocumento11 páginasUnifap Lista de Exercicios Cap 1 3 PDFEmerson TorresAinda não há avaliações
- Exercicio NBR 5419 SPDADocumento2 páginasExercicio NBR 5419 SPDAMaryanne Magalhães100% (1)
- Estudo Dirigido - Unidade 4Documento3 páginasEstudo Dirigido - Unidade 4Paulo Sergio DalviAinda não há avaliações
- Ace Av1 2016 2Documento3 páginasAce Av1 2016 2alan_smoAinda não há avaliações
- Prova Técnica - ElétricaDocumento4 páginasProva Técnica - ElétricaDavi MatosAinda não há avaliações
- Exercício - 11 - Instalações Elétricas I - 02 2016 PitágorasDocumento4 páginasExercício - 11 - Instalações Elétricas I - 02 2016 PitágorasViniciusCamargosAinda não há avaliações
- Retificador Monofásico Controlado de Onda Completa Com Carga ResistivaDocumento14 páginasRetificador Monofásico Controlado de Onda Completa Com Carga ResistivaThais FujitaAinda não há avaliações
- Simulação 1 - Ponte de Wheatstone em InstrumentaçãoDocumento10 páginasSimulação 1 - Ponte de Wheatstone em InstrumentaçãoJulia MensoniAinda não há avaliações
- Relatório Laboratório de Circuitos Eletricos - 7° Aula PraticaDocumento5 páginasRelatório Laboratório de Circuitos Eletricos - 7° Aula Pratica-Cold-Ainda não há avaliações
- Relatório Eletrônica de Potência. Retificador de Meia Onda ControladoDocumento7 páginasRelatório Eletrônica de Potência. Retificador de Meia Onda ControladoaLANAinda não há avaliações
- Relatorio OsciloscopioDocumento1 páginaRelatorio OsciloscopioemanuelAinda não há avaliações
- Retificador de Onda Completa Não-ControladoDocumento4 páginasRetificador de Onda Completa Não-Controladopedro_joao_lemuelAinda não há avaliações
- Exercícios Sobre Tensão, Corrente e ResistênciaDocumento2 páginasExercícios Sobre Tensão, Corrente e ResistênciaLUIZ ALEXANDRE DIAS DE ALMEIDAAinda não há avaliações
- 2 Lista de Máquinas ElétricasDocumento2 páginas2 Lista de Máquinas ElétricasLaís Helena Souza50% (2)
- Lista Leis Kirchoff Associacao ResistoresDocumento2 páginasLista Leis Kirchoff Associacao Resistorescheguevaraeng0% (1)
- Solução Dos Exercicios Dos Projetos Dos Supervisorios Da ApostilaDocumento58 páginasSolução Dos Exercicios Dos Projetos Dos Supervisorios Da ApostilaDaniel Fec Flu100% (1)
- CLP - Conceitos BasicosDocumento32 páginasCLP - Conceitos BasicosThiago MouttinhoAinda não há avaliações
- Exercício Metodo CIGRÉDocumento4 páginasExercício Metodo CIGRÉLuciana RodriguesAinda não há avaliações
- Acionamentos Aula Prática 2 - Partida Direta de Um Motor ElétricoDocumento2 páginasAcionamentos Aula Prática 2 - Partida Direta de Um Motor ElétricoJosé Ronaldo Tavares SantosAinda não há avaliações
- Exercicios Medidas-EletricasDocumento7 páginasExercicios Medidas-EletricasHailton SantosAinda não há avaliações
- Roteiro de Prática Laboratorial #919055Documento1 páginaRoteiro de Prática Laboratorial #919055Ádrian HenriqueAinda não há avaliações
- Aula 3 - Eletrotécnica AplicadaDocumento38 páginasAula 3 - Eletrotécnica AplicadaHenrique AlmeidaAinda não há avaliações
- Lista 1 Psicrometria e Processos PsicromtricosDocumento2 páginasLista 1 Psicrometria e Processos PsicromtricosRenatodocsAinda não há avaliações
- Prova de Instrumentos e Medidas ElétricasDocumento5 páginasProva de Instrumentos e Medidas ElétricasJane CardosoAinda não há avaliações
- Motor ElétricoDocumento7 páginasMotor ElétricoJOAO ESTEVAOAinda não há avaliações
- Exercícios Sistemas Trifásicos RespostasDocumento4 páginasExercícios Sistemas Trifásicos Respostasengfabio90Ainda não há avaliações
- 1a Lista de Exercicios C FDocumento5 páginas1a Lista de Exercicios C FViviane SilvaAinda não há avaliações
- ElétricaDocumento226 páginasElétricajoaquicarlosAinda não há avaliações
- Despacho Economico de Energia - Unidade 1 PDFDocumento71 páginasDespacho Economico de Energia - Unidade 1 PDFFabio SouzaAinda não há avaliações
- Aplicação Distancia-21-01Documento2 páginasAplicação Distancia-21-01Solange Antonio Carlos100% (1)
- Algebra de BooleDocumento22 páginasAlgebra de BooleJuliano MartinsAinda não há avaliações
- Conversor CA-cc Diodo ExerciciosDocumento5 páginasConversor CA-cc Diodo ExerciciosDiego GaldinoAinda não há avaliações
- Exercicios - Medidas - Parte IIIDocumento9 páginasExercicios - Medidas - Parte IIIVictorAinda não há avaliações
- Listadeexe txtrciciosIMotoresdeinducaoDocumento2 páginasListadeexe txtrciciosIMotoresdeinducaoCláudio Marlon MaiaAinda não há avaliações
- Aula Pratica NR 03 Resol Exercicio NR 02 TEAT - 2020Documento13 páginasAula Pratica NR 03 Resol Exercicio NR 02 TEAT - 2020Alberto chicava secoAinda não há avaliações
- Apostila Laboratório de EletrônicaDocumento57 páginasApostila Laboratório de EletrônicaJean Neves dos Santos SerraAinda não há avaliações
- Bateria De Gravidade: Convertendo energia gravitacional em eletricidadeNo EverandBateria De Gravidade: Convertendo energia gravitacional em eletricidadeAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViiiNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViiiAinda não há avaliações
- A Importância Da Geografia No Ensino Fundamental e MédioDocumento2 páginasA Importância Da Geografia No Ensino Fundamental e MédioJay Klender WorsesAinda não há avaliações
- Junho - 3 SemanaDocumento2 páginasJunho - 3 SemanaPedro LuccaAinda não há avaliações
- Resumo de Introdução Ao Estudo Do Direito IIDocumento119 páginasResumo de Introdução Ao Estudo Do Direito IIFilipe Mimoso83% (6)
- Portfolio Eletrica SennacamposDocumento8 páginasPortfolio Eletrica SennacamposMarciel UnepróAinda não há avaliações
- 03 Mapa Mental Pesquisa de Mercado PDFDocumento1 página03 Mapa Mental Pesquisa de Mercado PDFIsa MenezesAinda não há avaliações
- Plano de EnsinoDocumento4 páginasPlano de EnsinoCaio FigueiredoAinda não há avaliações
- Resumo Frei Luis de SousaDocumento5 páginasResumo Frei Luis de Sousakonkluzja89Ainda não há avaliações
- Modelos Formularios - Editaveis - Imposto Predial Urbano Ipu - Imposto Predial Urbano Declaracao Modelo 5Documento4 páginasModelos Formularios - Editaveis - Imposto Predial Urbano Ipu - Imposto Predial Urbano Declaracao Modelo 5HASSAU MANUEL100% (5)
- Lina BoDocumento215 páginasLina BoSimone NeivaAinda não há avaliações
- NR01 - Formulario para Entrevista Com Trabalhadores Sobre Percepcao de Perigos e Riscos - 2023Documento3 páginasNR01 - Formulario para Entrevista Com Trabalhadores Sobre Percepcao de Perigos e Riscos - 2023Jamile AraújoAinda não há avaliações
- Portugal e Nápoles Na Época Do Absolutismo ReformistaDocumento554 páginasPortugal e Nápoles Na Época Do Absolutismo ReformistaDermeval MarinsAinda não há avaliações
- Antonio AleixoDocumento74 páginasAntonio Aleixodavidaaduarte100% (1)
- Abraham Maslow SinteseDocumento18 páginasAbraham Maslow SinteseIsraelAinda não há avaliações
- Termodinamica de Processos EscoamentoDocumento20 páginasTermodinamica de Processos Escoamentoanabene100% (1)
- Mini Guia Musculação Exercícios BásicosDocumento23 páginasMini Guia Musculação Exercícios BásicosLeroy BeckerAinda não há avaliações
- Diego Boffi ENTREVISTA - "QUANDONDE - HAITI2015, UM RELATO DE EXPERIÊNCIA EM INTERVENÇÃO URBANA"Documento15 páginasDiego Boffi ENTREVISTA - "QUANDONDE - HAITI2015, UM RELATO DE EXPERIÊNCIA EM INTERVENÇÃO URBANA"Vitoria CarineAinda não há avaliações
- AV1 Geologia para Engenharia Estácio EADDocumento3 páginasAV1 Geologia para Engenharia Estácio EADRenatoAinda não há avaliações
- Exercícios Sobre Simbolismo Com GabaritoDocumento4 páginasExercícios Sobre Simbolismo Com GabaritoSelma NazareAinda não há avaliações
- The Arson Betrayal WT - En.ptDocumento18 páginasThe Arson Betrayal WT - En.ptRafaelAinda não há avaliações
- Pré - Uni 2009 - FÍSICA II - 2º ANO Caderno - TÉRMICA - OPTICA I-1 ParteDocumento30 páginasPré - Uni 2009 - FÍSICA II - 2º ANO Caderno - TÉRMICA - OPTICA I-1 ParteIsabela ChagasAinda não há avaliações
- Programa Da 6 ClasseDocumento66 páginasPrograma Da 6 ClasseNharre Luga100% (1)
- Caderno69 Benites Corpoterritorio1Documento23 páginasCaderno69 Benites Corpoterritorio1Leonardo FerreiraAinda não há avaliações
- Curso Wordpress Modulo 1Documento70 páginasCurso Wordpress Modulo 1nelmiAinda não há avaliações
- Aula 5 - Serviços Auxiliares Da SEDocumento73 páginasAula 5 - Serviços Auxiliares Da SEJOAO VICTOR MENDES MELO100% (1)
- Otto Gross - Um Psicanalista Anarquista.Documento59 páginasOtto Gross - Um Psicanalista Anarquista.Anderson Alves de MedeirosAinda não há avaliações
- A Contribuição de Karl PolanyiDocumento40 páginasA Contribuição de Karl PolanyiLucas BalconiAinda não há avaliações
- Questionario AvaliativoDocumento2 páginasQuestionario AvaliativoDébora CristinaAinda não há avaliações
- Projeto Festival Da Musica Estudantil PDFDocumento9 páginasProjeto Festival Da Musica Estudantil PDFLyvia L LageAinda não há avaliações
- Livro Verde PokerDocumento14 páginasLivro Verde PokerahnertAinda não há avaliações
- Plan Cur So Did A Tica 20171Documento4 páginasPlan Cur So Did A Tica 20171Caíque BrunoAinda não há avaliações