Você também pode gostar
- Sintonia de ControladoresDocumento17 páginasSintonia de ControladoresMarioAinda não há avaliações
- Guilherme Vianna Raffo Algoritmos de Controle Preditivo (Preditivo)Documento169 páginasGuilherme Vianna Raffo Algoritmos de Controle Preditivo (Preditivo)Renan PortoAinda não há avaliações
- MARCO ANTONIO DALCIN TOCCHETTO - ESTIMADOR DE ESTADOS PARA ROBÔ DIFERENCIAL (Pure-Pursuit)Documento86 páginasMARCO ANTONIO DALCIN TOCCHETTO - ESTIMADOR DE ESTADOS PARA ROBÔ DIFERENCIAL (Pure-Pursuit)Renan PortoAinda não há avaliações
- Lista3 Liu para 04agostoDocumento2 páginasLista3 Liu para 04agostoRenan PortoAinda não há avaliações
- Lista2 Liu para 30julhoDocumento1 páginaLista2 Liu para 30julhoRenan PortoAinda não há avaliações
- Lista1 Liu para 16julhoDocumento4 páginasLista1 Liu para 16julhoRenan PortoAinda não há avaliações
- Aula 1Documento22 páginasAula 1Renan PortoAinda não há avaliações
- Aula 5Documento14 páginasAula 5Renan PortoAinda não há avaliações
- Lista4 para 11agostoDocumento2 páginasLista4 para 11agostoRenan PortoAinda não há avaliações
- Aula 2Documento18 páginasAula 2Renan PortoAinda não há avaliações
- Aula 3Documento11 páginasAula 3Renan PortoAinda não há avaliações
- Redes Neurais Artificiais Ivan Nunes Da Silva PDFDocumento135 páginasRedes Neurais Artificiais Ivan Nunes Da Silva PDFHederson Kratsch60% (5)
- AULA 4newDocumento25 páginasAULA 4newRenan PortoAinda não há avaliações
- Anatomia Do Esqueleto ApendicularDocumento45 páginasAnatomia Do Esqueleto ApendicularVanessa VitoriaAinda não há avaliações
- Relatório de Levantamento MaterialDocumento2 páginasRelatório de Levantamento MaterialHeltonsubrg SystemAinda não há avaliações
- Ramos de Uma Grande Arvore PDFDocumento145 páginasRamos de Uma Grande Arvore PDFRafael OliveiraAinda não há avaliações
- Programa de Hipertrofia Feminina GRATIS Nivel 1 MescladoDocumento11 páginasPrograma de Hipertrofia Feminina GRATIS Nivel 1 MescladoCasa na VilaAinda não há avaliações
- 3258 Boletim Tecnico Eucatex SiliconeDocumento3 páginas3258 Boletim Tecnico Eucatex Siliconeedgar m paivaAinda não há avaliações
- Geometria ÁtomoDocumento4 páginasGeometria Átomoemarchesi2012Ainda não há avaliações
- Guia de Identificação Das Pastagens Nativas Do Pantanal (2019)Documento223 páginasGuia de Identificação Das Pastagens Nativas Do Pantanal (2019)Andreia CostaAinda não há avaliações
- Moldes - Chapeu de MarinheiroDocumento3 páginasMoldes - Chapeu de Marinheiroph mixAinda não há avaliações
- BOVINOCULTURADocumento85 páginasBOVINOCULTURAJuliana MouraAinda não há avaliações
- Vasos de BarroDocumento5 páginasVasos de BarroDaniel Sipriano NetoAinda não há avaliações
- Yago CastroDocumento21 páginasYago CastroYago CastroAinda não há avaliações
- Patologia Das ConstruçõesDocumento2 páginasPatologia Das ConstruçõesAldenilo VieiraAinda não há avaliações
- Aula 6 - Recursos CinesioterapêuticosDocumento9 páginasAula 6 - Recursos CinesioterapêuticosVeronica luz anselmoAinda não há avaliações
- 02 - Princípios Da RadioterapiaDocumento6 páginas02 - Princípios Da RadioterapiaForwomenAinda não há avaliações
- Termodinâmica - 3Documento46 páginasTermodinâmica - 3moises20caAinda não há avaliações
- Etapas Do Projeto de PesquisaDocumento2 páginasEtapas Do Projeto de Pesquisajoao vitorAinda não há avaliações
- Sas2018 4Documento17 páginasSas2018 4jgabrielcdaviAinda não há avaliações
- Proced Criar NOVA CONTA No FusionSolar MONODocumento4 páginasProced Criar NOVA CONTA No FusionSolar MONOCharles CardosoAinda não há avaliações
- A Perdida Arte Da DatilografiaDocumento4 páginasA Perdida Arte Da DatilografiaPatricia GomesAinda não há avaliações
- Noção Intuitiva de LimitesDocumento14 páginasNoção Intuitiva de LimitesThayla CastroAinda não há avaliações
- Endometriose 2021Documento16 páginasEndometriose 2021Nathalia Vasconcelos Barroso Todt AragãoAinda não há avaliações
- Ficha Rakan (ATUAL)Documento3 páginasFicha Rakan (ATUAL)Fiky ColdAinda não há avaliações
- Lista 1 MruvDocumento5 páginasLista 1 MruvCamilla BuçardAinda não há avaliações
- F10 Hfen11 em Guia Prof Resumo Al 10anoDocumento3 páginasF10 Hfen11 em Guia Prof Resumo Al 10anoCatarina StelmashchukAinda não há avaliações
- Trabalho de TGA - Handy, Fayol e FordDocumento9 páginasTrabalho de TGA - Handy, Fayol e FordMarcos Roberto RosaAinda não há avaliações
- Óquio: Istema Etro ErroviárioDocumento96 páginasÓquio: Istema Etro ErroviárioJLAinda não há avaliações
- RESGATE HISTÓRICO DE UMA COMUNIDADE: Um Olhar Sobre A História e Os Patrimônios Culturais Material e Natural Do Bairro Ponte AltaDocumento39 páginasRESGATE HISTÓRICO DE UMA COMUNIDADE: Um Olhar Sobre A História e Os Patrimônios Culturais Material e Natural Do Bairro Ponte AltaPeterson Mendes PaulinoAinda não há avaliações
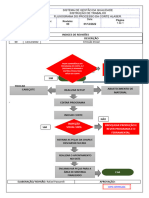
- 10 FLUXO CORTE LASER - Revisado 21-07-2020Documento1 página10 FLUXO CORTE LASER - Revisado 21-07-2020Rafael PassarelliAinda não há avaliações
- Classificacao Geral Vestibular UeaDocumento991 páginasClassificacao Geral Vestibular UeamartinselanildaAinda não há avaliações
- Relatorio Analise OrganicaDocumento17 páginasRelatorio Analise Organicavilmar konageski jr100% (4)