Você também pode gostar
- 1 P.D - 2022 (Mat. 5º Ano) - Blog Do Prof. WarlesDocumento2 páginas1 P.D - 2022 (Mat. 5º Ano) - Blog Do Prof. WarlesRaniane Almeida100% (1)
- RevisaoDocumento3 páginasRevisaoDivisão de Planejamento e Normatização DPN100% (2)
- Ex4 ModelosDocumento3 páginasEx4 ModelosGabriel Henrique BritoAinda não há avaliações
- Estatistica Sem MatematicaDocumento611 páginasEstatistica Sem MatematicaKarla SantosAinda não há avaliações
- PRE29006 Lista 3Documento6 páginasPRE29006 Lista 3Junior MxAinda não há avaliações
- Analise1 Lista 1Documento4 páginasAnalise1 Lista 1Amanda PerinAinda não há avaliações
- Apostila Curso RessonânciaDocumento41 páginasApostila Curso RessonânciaHerick Savione82% (17)
- En Mat 93 94Documento3 páginasEn Mat 93 94FabricioRodrigues0% (1)
- LEIS de NEWTON Compressed 3wvgzgDocumento12 páginasLEIS de NEWTON Compressed 3wvgzgCristiane de ColAinda não há avaliações
- Estruturação de Sentenças em LibrasDocumento5 páginasEstruturação de Sentenças em LibrasDaniela Monteiro0% (1)
- Aula de Conforto TérmicoDocumento47 páginasAula de Conforto TérmicoEduardo RibaslarAinda não há avaliações
- Revisa Goiás 3 Mat MaioDocumento94 páginasRevisa Goiás 3 Mat MaioJorge Lucas100% (1)
- S3 - 6 - Capabilidade Não NormaisDocumento49 páginasS3 - 6 - Capabilidade Não NormaisMARCIOAinda não há avaliações
- Exerccios de Administracao FinanceiraDocumento71 páginasExerccios de Administracao Financeiratiagoepp67% (3)
- Exercicios de Volume Nono AnoDocumento39 páginasExercicios de Volume Nono AnoMarly AraújoAinda não há avaliações
- Exercícios Resolvidos: Frequência Absoluta, Relativa e AcumuladaDocumento9 páginasExercícios Resolvidos: Frequência Absoluta, Relativa e AcumuladaDiego Oliveira100% (6)
- TD de Matemática - Aula 13 - Frente 1 - Versao 3Documento18 páginasTD de Matemática - Aula 13 - Frente 1 - Versao 3leonardAinda não há avaliações
- Resistência Dos Materiais Resistência Dos Materiais: Deflexão de Vigas Por IntegraçãoDocumento9 páginasResistência Dos Materiais Resistência Dos Materiais: Deflexão de Vigas Por IntegraçãoFrenzy BritoAinda não há avaliações
- Jabardo 2007Documento184 páginasJabardo 2007Francisco OppsAinda não há avaliações
- Fichamento Bibliográfico - ChauíDocumento13 páginasFichamento Bibliográfico - ChauíRaquel Pereira GuimarãesAinda não há avaliações
- Aula2-Diferenciação 02.03.2021Documento5 páginasAula2-Diferenciação 02.03.2021Jonathan Cantini BackAinda não há avaliações
- 2178 7045 1 PBDocumento14 páginas2178 7045 1 PBMatheus de SouzaAinda não há avaliações
- Atividade Equação Do 2º Grau MatemáticaDocumento1 páginaAtividade Equação Do 2º Grau MatemáticaCarlos Edilon100% (1)
- Plano de Acao PEIDocumento6 páginasPlano de Acao PEILuiz Fabiano BonettiAinda não há avaliações
- Especificacao Accu Chek ComboDocumento8 páginasEspecificacao Accu Chek ComboCassiano Ricardo GeromelAinda não há avaliações
- Apostila Amostragem Recomendação Adubação ManejoDocumento85 páginasApostila Amostragem Recomendação Adubação ManejoMarcelino Geraldo de MagalhãesAinda não há avaliações
- A Regra de Cramer É Uma Das Maneiras de Resolver Um Sistema LinearDocumento16 páginasA Regra de Cramer É Uma Das Maneiras de Resolver Um Sistema Linearanon-507802100% (5)
- Exercício Função (Todas)Documento21 páginasExercício Função (Todas)João MarcosAinda não há avaliações
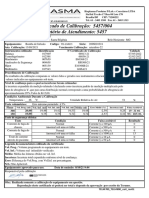
- Certificado de Calibração: 5457/004 Relatório de Atendimento: 5457Documento1 páginaCertificado de Calibração: 5457/004 Relatório de Atendimento: 5457Engenharia Clínica HC-UFMGAinda não há avaliações
- Cadências MusicaisDocumento49 páginasCadências MusicaisPatrick LeonardAinda não há avaliações