Você também pode gostar
- Abaques de MOHRDocumento2 páginasAbaques de MOHRouattara.o.madinaAinda não há avaliações
- PaddyDocumento10 páginasPaddyThink AutoAinda não há avaliações
- Lista 1 - Matrizes e DeterminantesDocumento9 páginasLista 1 - Matrizes e DeterminantesjuliermegcoAinda não há avaliações
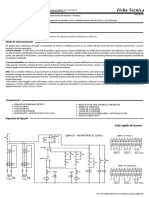
- Simulación PLCdeltaSX2 PDFDocumento1 páginaSimulación PLCdeltaSX2 PDFDaniel F. RodasAinda não há avaliações
- Simulación PLC DELTA PDFDocumento2 páginasSimulación PLC DELTA PDFDaniel F. RodasAinda não há avaliações
- Projeto EletricoDocumento4 páginasProjeto EletricoAndre RicardoAinda não há avaliações
- Transformadores Com 3 EnrolamentosDocumento4 páginasTransformadores Com 3 Enrolamentosmanel843Ainda não há avaliações
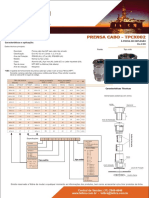
- Prensa Cabo Exd TPCX002Documento1 páginaPrensa Cabo Exd TPCX002Anonymous O6I4DKAinda não há avaliações
- Integrales de MohrDocumento1 páginaIntegrales de Mohrjoa11789Ainda não há avaliações
- 01 EeDocumento46 páginas01 EeBia Fernanda Verly MartinsAinda não há avaliações
- Estataica Física 66 A 88 V3Documento27 páginasEstataica Física 66 A 88 V3ANTONIO MARCOS BARBOSAAinda não há avaliações
- MU11 Roscas Tabela de Conversao TecemDocumento1 páginaMU11 Roscas Tabela de Conversao TecemKliver AdenauerAinda não há avaliações
- Resolução Moysés - Cap 6 - MecânicaDocumento15 páginasResolução Moysés - Cap 6 - MecânicaLuciana Vasconcellos100% (3)
- TesteDocumento8 páginasTesteWilson R SilvaAinda não há avaliações
- 12 - Análise Dimensional e SemelhançaDocumento18 páginas12 - Análise Dimensional e SemelhançaLucasValadaresAinda não há avaliações
- (APOSTILA) Lista de Códigos de Programação - TRAUBDocumento16 páginas(APOSTILA) Lista de Códigos de Programação - TRAUBProjetos KoppAinda não há avaliações
- CP1 2 4Documento20 páginasCP1 2 4Osanebi Chukwudi LuckyAinda não há avaliações
- Parte H de La Tarea 3Documento1 páginaParte H de La Tarea 3maria gabriela riega fernandezAinda não há avaliações
- CIV2801 ProcessoCrossDocumento13 páginasCIV2801 ProcessoCrossDouglas TostaAinda não há avaliações
- Miea MD Tpc3tiagopintoDocumento2 páginasMiea MD Tpc3tiagopintoDiogenia JoãoAinda não há avaliações
- Voleibol Elim Simples SeqDocumento2 páginasVoleibol Elim Simples SeqerickAinda não há avaliações
- MMQ AJUSTES Aulas VideosDocumento30 páginasMMQ AJUSTES Aulas VideosVanderlei Vieira farias JuniorAinda não há avaliações
- Modelagem Dinamica 11 05 17Documento36 páginasModelagem Dinamica 11 05 17celso0007Ainda não há avaliações
- ObjetivosDocumento5 páginasObjetivosNutrição e DiversãoAinda não há avaliações
- Bridge PuzzleDocumento13 páginasBridge PuzzleAlberto Hernández CruzAinda não há avaliações
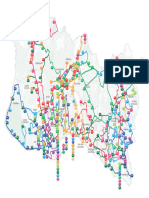
- 2021 Mobi Mapa LinhasDocumento1 página2021 Mobi Mapa Linhasmariaeduardarosaborges799Ainda não há avaliações
- PLC 20SX2Documento414 páginasPLC 20SX2Md. Emtiaz HossainAinda não há avaliações
- F 07.47 - 00 Memorial de Calculo MC23 - Torque de Aperto ASME VIII Div. IDocumento7 páginasF 07.47 - 00 Memorial de Calculo MC23 - Torque de Aperto ASME VIII Div. Ithiagorep17Ainda não há avaliações
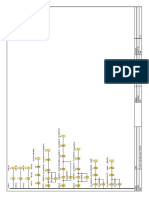
- PJ Elevador 3 AndaresDocumento1 páginaPJ Elevador 3 Andaresalanifood200Ainda não há avaliações
- Carta Molde Dos Dentes New Ace Yamahachi Da KotaDocumento4 páginasCarta Molde Dos Dentes New Ace Yamahachi Da KotaherberthfaquimbrasilAinda não há avaliações
- Clasificador Con TimersDocumento2 páginasClasificador Con TimersSelvin Marcelo UmanzorAinda não há avaliações
- 21 - A4 FT 21 1822752000100401000000 QRM 03 Rev 1 2 Ok PDFDocumento2 páginas21 - A4 FT 21 1822752000100401000000 QRM 03 Rev 1 2 Ok PDFalexandreAinda não há avaliações
- RT0231-19 - Relatorio Da Resistencia de Aterramento Do SPDA WHITE MARTINS.Documento47 páginasRT0231-19 - Relatorio Da Resistencia de Aterramento Do SPDA WHITE MARTINS.Anne Caroline RodriguesAinda não há avaliações
- Calendar IWE14 2023 2024Documento2 páginasCalendar IWE14 2023 2024Mohammed BujairAinda não há avaliações
- Tema 11 Teorema Sobre A Variação Do Momento AngularDocumento4 páginasTema 11 Teorema Sobre A Variação Do Momento AngularZëky NhächëngöAinda não há avaliações
- Aula 3a - Mecanica Dos Solidos em EleMaq - v2020 - EsforcosDocumento15 páginasAula 3a - Mecanica Dos Solidos em EleMaq - v2020 - EsforcosUTA - Std - Alécio Samir Brito de PinaAinda não há avaliações
- Relação de Materiais NecessáriosDocumento1 páginaRelação de Materiais Necessáriosluismoreira.comAinda não há avaliações
- CAPÍTULO II GEOESTATÍSTICA - Exercícios Resolvidos PDFDocumento5 páginasCAPÍTULO II GEOESTATÍSTICA - Exercícios Resolvidos PDFSérgio AlmeidaAinda não há avaliações
- Experimento 4Documento5 páginasExperimento 4Mariany CutrimAinda não há avaliações
- Slides 04Documento34 páginasSlides 04Lucas MotaAinda não há avaliações
- PDF 001 005 PMPM3 L8 TC 02 M (Reta de Tendencia)Documento5 páginasPDF 001 005 PMPM3 L8 TC 02 M (Reta de Tendencia)Cid AraujoAinda não há avaliações
- Compact e UseDocumento2 páginasCompact e Usemahdi elmayAinda não há avaliações
- DormerDocumento2 páginasDormerEduardo JorgeAinda não há avaliações
- Aula5 - Instrumentos de Medição - MicrometroDocumento48 páginasAula5 - Instrumentos de Medição - MicrometroCairo VitorAinda não há avaliações
- Apostila de Análise Estrutural I - Pórticos IsostáticosDocumento6 páginasApostila de Análise Estrutural I - Pórticos IsostáticosCaykeLuisAinda não há avaliações
- Catalogo Delicato 2022Documento42 páginasCatalogo Delicato 2022Fábio de OliveiraAinda não há avaliações
- Apostila Métodos Numéricos e Mathcad FacensDocumento23 páginasApostila Métodos Numéricos e Mathcad FacensCarla SouzaAinda não há avaliações
- 21 - A4 FT QRM 01 1 822 860001 00 401000 0000 Rev 00 OkDocumento2 páginas21 - A4 FT QRM 01 1 822 860001 00 401000 0000 Rev 00 OkalexandreAinda não há avaliações
- TP Pratica11Documento5 páginasTP Pratica11EDUARDO JOSE SALGADO RAMIREZAinda não há avaliações
- FMCI - Cap 8 PROPAGAÇÃO DE INCERTEZAS ATRAVÉS DE MÓDULOSDocumento9 páginasFMCI - Cap 8 PROPAGAÇÃO DE INCERTEZAS ATRAVÉS DE MÓDULOSRodrigo DiasAinda não há avaliações
- Sinais, Energia Potencia...Documento35 páginasSinais, Energia Potencia...Noely FernandaAinda não há avaliações
- Lista - 1 - 2023-2 (PrinCom Turma 02)Documento1 páginaLista - 1 - 2023-2 (PrinCom Turma 02)Maria Luíza Vasconcelos do NascimentoAinda não há avaliações
- Brocas para RoscasDocumento2 páginasBrocas para RoscasMontes GarciaAinda não há avaliações
- Semafor LadderDocumento2 páginasSemafor LadderJonathan Neira GonzalezAinda não há avaliações
- 13 - Controle Automatico Da GeraçãoDocumento36 páginas13 - Controle Automatico Da GeraçãoBia Fernanda Verly MartinsAinda não há avaliações
- 01 EeDocumento46 páginas01 EeBia Fernanda Verly MartinsAinda não há avaliações
- 04 - Estimação de Estado - Observabilidade de RedesDocumento33 páginas04 - Estimação de Estado - Observabilidade de RedesBia Fernanda Verly MartinsAinda não há avaliações
- 07 deDocumento19 páginas07 deBia Fernanda Verly MartinsAinda não há avaliações
- Template TCCEng Eletrica UFFDocumento18 páginasTemplate TCCEng Eletrica UFFBia Fernanda Verly MartinsAinda não há avaliações
- N3 Operacao Q1 deDocumento3 páginasN3 Operacao Q1 deBia Fernanda Verly MartinsAinda não há avaliações
- Metodologia BiaDocumento5 páginasMetodologia BiaBia Fernanda Verly MartinsAinda não há avaliações
- Planilha para Cálculo de AgitadoresDocumento29 páginasPlanilha para Cálculo de AgitadoresElton Neves da Silva100% (1)
- INFERNO NACIONAL-TEXTO WordDocumento3 páginasINFERNO NACIONAL-TEXTO Wordfrance miraAinda não há avaliações
- Plano Alimentar - Igor Furtado Diniz MiclosDocumento5 páginasPlano Alimentar - Igor Furtado Diniz Miclosprof.igordiniz.porAinda não há avaliações
- Folha de Respostas Pep-R - Com VocêDocumento14 páginasFolha de Respostas Pep-R - Com VocêEstágio EspecíficoAinda não há avaliações
- Narcisismo - Saúde MentalDocumento5 páginasNarcisismo - Saúde MentalYanni AguiarAinda não há avaliações
- Tabela QuadricasDocumento3 páginasTabela QuadricasVlad FernandesAinda não há avaliações
- A Vaca Já Foi Pro Brejo - Tião Carreiro e Pardinho - Cifras de ViolaboabomDocumento1 páginaA Vaca Já Foi Pro Brejo - Tião Carreiro e Pardinho - Cifras de ViolaboabomJair Golfinho Bantos de AruandaAinda não há avaliações
- Lista de Presente Chá de Panela Renan&RayssaDocumento6 páginasLista de Presente Chá de Panela Renan&RayssalucasguedesusaAinda não há avaliações
- Exercicio EletrodinâmicaDocumento10 páginasExercicio EletrodinâmicaDaniel Teixeira0% (1)
- Bons Sebenta-DIP TeóricaDocumento78 páginasBons Sebenta-DIP TeóricaFilipe Rodrigues BandeiraAinda não há avaliações
- Folder MeditacaoDocumento2 páginasFolder MeditacaoRafael AméricoAinda não há avaliações
- Linguica Frescal Mato Grosso Do Sul Guias para Gerenciamento Riscos Sanitarios em AlimentosDocumento16 páginasLinguica Frescal Mato Grosso Do Sul Guias para Gerenciamento Riscos Sanitarios em Alimentosjuliodesenhista100% (1)
- Aula 09 PDFDocumento22 páginasAula 09 PDFjeozadaqueAinda não há avaliações
- Prefácio Da Introdução A Critica Da Economia Política, MarxDocumento3 páginasPrefácio Da Introdução A Critica Da Economia Política, MarxRoberta SampertAinda não há avaliações
- Premio Bula3Documento1 páginaPremio Bula3Carla-Bruno BordignonAinda não há avaliações
- Relatório de Acidez e AlcalinidadeDocumento23 páginasRelatório de Acidez e AlcalinidadeEduarda CardozoAinda não há avaliações
- O Mundo Do Trabalho e o Projeto de Vida: Química AplicadaDocumento19 páginasO Mundo Do Trabalho e o Projeto de Vida: Química AplicadaLaura TorresAinda não há avaliações
- Apostila 4 - A Missão de AlmaDocumento9 páginasApostila 4 - A Missão de AlmaRodrigo LeiteAinda não há avaliações
- Alienista RoteiroDocumento16 páginasAlienista RoteiroJetterson CondeAinda não há avaliações
- Pérolas Da GratidãoDocumento17 páginasPérolas Da GratidãoMariah EsidhAinda não há avaliações
- Muraplast FK 65 B 01 - 2008Documento2 páginasMuraplast FK 65 B 01 - 2008Kristy WilliamsAinda não há avaliações
- Triplo X, Duplo Y - Guilherme Pereira Albert, 3DDocumento9 páginasTriplo X, Duplo Y - Guilherme Pereira Albert, 3DGuilherme AlbertAinda não há avaliações
- Dinâmicas de GrupoDocumento3 páginasDinâmicas de GrupoTPSaraHAinda não há avaliações
- Missa Da Sagrada FaceDocumento4 páginasMissa Da Sagrada FaceSacerdote Eguimar Matias Dos SantosAinda não há avaliações
- De Como Filosofar É Aprender A Morrer - o PensamentoDocumento22 páginasDe Como Filosofar É Aprender A Morrer - o PensamentoMoacirAinda não há avaliações
- 1 Lista de Exercicios Complementares de Matematica Professora ChristianeDocumento11 páginas1 Lista de Exercicios Complementares de Matematica Professora ChristianeRegivaldo Cláudio de FreitasAinda não há avaliações
- Rádio Comunitária - ApostilaDocumento27 páginasRádio Comunitária - ApostilaLondulade BezerraAinda não há avaliações
- Material Complementar Ashtanga Yoga AvancadoDocumento12 páginasMaterial Complementar Ashtanga Yoga AvancadoHeitor Medeiros Vieira100% (2)
- Abraco RP Pac 002 Rev. 0 Maio 2018 2Documento18 páginasAbraco RP Pac 002 Rev. 0 Maio 2018 2PaulaAinda não há avaliações
- Arqueologia No Sertão PDFDocumento16 páginasArqueologia No Sertão PDFPaulo Henrique Souza MartinsAinda não há avaliações