Você também pode gostar
- GMDocumento85 páginasGMThomas Fensterseifer100% (2)
- EnciclopediaDocumento321 páginasEnciclopediarafael penaAinda não há avaliações
- Modos de Serviços TvsDocumento45 páginasModos de Serviços TvsJerônimo75% (4)
- Sensor de Pms e Fase TestesDocumento3 páginasSensor de Pms e Fase TestesGabriel Campos100% (2)
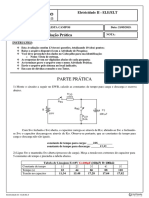
- Avaliação Prática - Eletricidade IIDocumento6 páginasAvaliação Prática - Eletricidade IINilton CamposAinda não há avaliações
- Prova 1 - ResolvidaDocumento13 páginasProva 1 - ResolvidaAUGUSTO ALPE COPPETTIAinda não há avaliações
- Relatorio MatB CompositosDocumento24 páginasRelatorio MatB CompositosAUGUSTO ALPE COPPETTIAinda não há avaliações
- MetalógrafaDocumento38 páginasMetalógrafaAUGUSTO ALPE COPPETTIAinda não há avaliações
- Comparação de ligas metálicas para engenhariaDocumento2 páginasComparação de ligas metálicas para engenhariaAUGUSTO ALPE COPPETTIAinda não há avaliações
- Características do som medido com osciloscópioDocumento4 páginasCaracterísticas do som medido com osciloscópioVanessa VeríssimoAinda não há avaliações
- TC 14a12 20A12Documento42 páginasTC 14a12 20A12snakewdj1852100% (2)
- TDS1002B - Manual (Osciloscópio) PDFDocumento204 páginasTDS1002B - Manual (Osciloscópio) PDFvitor gledisonAinda não há avaliações
- ESTA002-17 Laboratorio 1Documento11 páginasESTA002-17 Laboratorio 1IAMAinda não há avaliações
- Multiplicador TBJDocumento7 páginasMultiplicador TBJMarcelo Da Rosa RodriguesAinda não há avaliações
- Incb 015Documento54 páginasIncb 015Joao LuisAinda não há avaliações
- MIG 500C 220V 3PH: Máquina de Solda MIG 220V 3 FasesDocumento18 páginasMIG 500C 220V 3PH: Máquina de Solda MIG 220V 3 FasesPaulo HenriqueeAinda não há avaliações
- MO 2025 2061 2100 2200 Software BRDocumento28 páginasMO 2025 2061 2100 2200 Software BRGeorge Romero Tadeu Carvalho NunesAinda não há avaliações
- Teste 3 115defenitivoDocumento10 páginasTeste 3 115defenitivoMarco RibeiroAinda não há avaliações
- 20CD2R STR w6753 STR w6554Documento20 páginas20CD2R STR w6753 STR w6554Percy Bern50% (2)
- Medição de defasagem entre sinais senoidais com osciloscópioDocumento5 páginasMedição de defasagem entre sinais senoidais com osciloscópioPaulo César PontiniAinda não há avaliações
- Experiencia Final Fonte Chaveada Com PWM e AVR V2Documento10 páginasExperiencia Final Fonte Chaveada Com PWM e AVR V2Carlos Alexandre FerriAinda não há avaliações
- GED-139 Relé Digital de Sobrecorrente de Fase e de NeutroDocumento12 páginasGED-139 Relé Digital de Sobrecorrente de Fase e de NeutroEdson GomesAinda não há avaliações
- Guia técnico Philco MSP 210NDocumento15 páginasGuia técnico Philco MSP 210NNelsinho MayaAinda não há avaliações
- Sony KV 29fa210+ (BR)Documento83 páginasSony KV 29fa210+ (BR)Nerci Pollnow100% (2)
- Teste de Compressão Relativa de Motores de Combustão Interna Com o Auxílio Da EletrônicaDocumento6 páginasTeste de Compressão Relativa de Motores de Combustão Interna Com o Auxílio Da EletrônicaMagaliReynaAinda não há avaliações
- Circuito CeifadorDocumento26 páginasCircuito CeifadorAndré CarlosAinda não há avaliações
- Catálogo de Regulador de TensãoDocumento14 páginasCatálogo de Regulador de TensãoMaria MachadoAinda não há avaliações
- Apostila M4Documento18 páginasApostila M4Jair AlvesAinda não há avaliações
- Osciloscópio ExercíciosDocumento1 páginaOsciloscópio ExercíciosRute MoreiraAinda não há avaliações
- Filtro Passa-Faixa RCDocumento13 páginasFiltro Passa-Faixa RCAkillys FelipeAinda não há avaliações
- Manual Técnico AUDIO PB-120Documento14 páginasManual Técnico AUDIO PB-120JOMAREYAinda não há avaliações
- 29fu1rl - MFL37773231Documento22 páginas29fu1rl - MFL37773231Emerson de AlmeidaAinda não há avaliações
- CE6000 Mala de Testes Trifasica Computadorizada para Calibracao de RelesDocumento2 páginasCE6000 Mala de Testes Trifasica Computadorizada para Calibracao de Relesfernandonascime7325Ainda não há avaliações
- Sistema TPS eletrônicoDocumento5 páginasSistema TPS eletrônicoKanomba JavaAinda não há avaliações