Escolar Documentos
Profissional Documentos
Cultura Documentos
Arquitetura de Computadores-UAB
Enviado por
Alan Martins SantosDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Arquitetura de Computadores-UAB
Enviado por
Alan Martins SantosDireitos autorais:
Formatos disponíveis
Evoluo e Arquitetura de Computadores
Sumrio
pg.
1. EVOLUO E ARQUITETURAS DOS COMPUTADORES ....................................................................... 9 1.1- Evoluo dos computadores ............................................................................................................................................ 9 1.1.1- Computadores eletrnicos 1 Gerao .................................................................................................................. 9 1.1.2 - Computadores transistorizados 2 Gerao........................................................................................................ 11 1.1.3 - Computadores com circuitos integrados 3 Gerao ...................................................................................... 12 1.1.4 - ltimas geraes .............................................................................................................................................................. 12 1.2 -Arquiteturas de computadores ....................................................................................................................................... 13 1.2.1 - Mquinas von Neumann ............................................................................................................................................... 13 2. A Unidade Central de Processamento - CPU....................................................................................... 15 2.1 - Estrutura e funcionamento da CPU............................................................................................................................... 15 2.2 - Evoluo da CPU .................................................................................................................................................................. 17 2.3 - Coprocessador aritmtico e memria cache ............................................................................................................. 19 2.4 - Modo Real x Modo Protegido ......................................................................................................................................... 19 2.4.1 Memria Virtual ................................................................................................................................................................... 20 2.4.2 - Multitarefa........................................................................................................................................................................... 21 2.4.3 -Memria Protegida ........................................................................................................................................................... 21 2.5 - Clock ......................................................................................................................................................................................... 21 2.6 - Pipeline de instrues ........................................................................................................................................................ 22 2.7 - Arquiteturas CISC e RISC ................................................................................................................................................... 25 3. Memrias............................................................................................................................................... 27 3.1- Memrias primrias ............................................................................................................................................................. 29 3.1.1 - Memria RAM .................................................................................................................................................................... 29 3.1.2 - Memria cache .................................................................................................................................................................. 30 3.1.3 - Memria ROM ................................................................................................................................................................... 31 3.1.4 - Memria de con gurao CMOS................................................................................................................................ 32 3.1.5 - Registradores ..................................................................................................................................................................... 33 3.2 - Memrias secundrias ....................................................................................................................................................... 33 3.1.2 - Disco rgido......................................................................................................................................................................... 33 3.2.2 - Disquetes ............................................................................................................................................................................ 36 3.2.3 - Fita magntica ................................................................................................................................................................... 37 3.2.4 - Discos ticos....................................................................................................................................................................... 38 3.2.5 - Pen drives ............................................................................................................................................................................ 38 3.2.6 - Cartes de memria ........................................................................................................................................................ 39 4. Perifricos do computador .................................................................................................................. 40 4.1 - Dispositivos de entrada ..................................................................................................................................................... 40 4.1.1 - Teclado ................................................................................................................................................................................. 40 4.1.2 - Mouse ................................................................................................................................................................................... 40 4.1.3 - Scanner ............................................................................................................................................................................... 41
4.1.4 - Leitor tico ........................................................................................................................................................................ 41 4.1.5 - Microfone ........................................................................................................................................................................... 41 4.2 - Dispositivos de sada .......................................................................................................................................................... 41 4.2.1 - Monitor de Vdeo .............................................................................................................................................................. 42 4.2.2 - Impressoras ........................................................................................................................................................................ 42 4.2.3 - Plotters ................................................................................................................................................................................. 43 4.2.4 - Speakers............................................................................................................................................................................... 43 5. Outros componentes do computador ................................................................................................ 44 5.1 - Barramentos .......................................................................................................................................................................... 44 5.1.1- Barramento AGP ................................................................................................................................................................ 45 5.1.2 - Barramento PCI ................................................................................................................................................................. 46 5.1.3 - Barramento ISA ................................................................................................................................................................. 46 5.1.4 - Barramento USB................................................................................................................................................................ 46 5.1.5 - Barramento Firewire ........................................................................................................................................................ 47 5.1.6 - Slots de expanso e adaptadores............................................................................................................................... 47 5.2 - Portas de comunicao ..................................................................................................................................................... 48 5.2.1 - Portas seriais e paralelas ................................................................................................................................................ 48 5.2.2 - Portas PS/2 .......................................................................................................................................................................... 49 5.2.3- Comunicao com transmisso sem o.................................................................................................................... 49 5.3 Cooler ......................................................................................................................................................................................... 50 5.4 - Placa Me ............................................................................................................................................................................ 50 5.5 - Chipset ..................................................................................................................................................................................... 50 5.6 - Fonte de Alimentao ........................................................................................................................................................ 52 6. Sistemas numricos .............................................................................................................................. 54 6.1 - Sistema numrico decimal ............................................................................................................................................... 54 6.2 - Sistema numrico binrio................................................................................................................................................. 54 62.1 - Representao de Nmeros Inteiros .......................................................................................................................... 55 6.2.2 - Negao em complemento de dois .......................................................................................................................... 57 6.2.3 - Adio em binrio ........................................................................................................................................................... 58 6.2.4 - Subtrao em binrio ..................................................................................................................................................... 59 6.2.5 - Multiplicao em binrio .............................................................................................................................................. 59 6.2.6 - Diviso em binrio ........................................................................................................................................................... 61 6.3 - Sistema numrico hexadecimal ..................................................................................................................................... 62 6.4 - Converso de bases ............................................................................................................................................................ 63 6.4.1 - Decimal-binrio ................................................................................................................................................................ 63 6.4.2 - Hexadecimal Binrio .................................................................................................................................................... 63 6.4.3 - Binrio - Hexadecimal .................................................................................................................................................... 63 6.4.4 - Qualquer base para a decimal ..................................................................................................................................... 64 6.4.5 - Decimal - Hexadecimal................................................................................................................................................... 64
Evoluo e Arquitetura de Computadores
1.
EVOLUO E ARQUITETURAS DOS COMPUTADORES
Este captulo mostra um breve histrico da evoluo dos computadores. Tambm sero estudadas as arquiteturas que serviram de base para d origem a maioria das arquiteturas dos computadores atuais.
1.1- Evoluo dos computadores
A evoluo dos computadores tem sido caracterizada pelo aumento da velocidade dos processadores, pela diminuio do tamanho dos componentes, pelo aumento da capacidade de memria e pelo aumento da capacidade e da velocidade dos dispositivos de entrada e sada (E/S).
Um dos fatores responsveis pelo grande aumento da velocidade dos processadores a diminuio do tamanho dos componentes dos microprocessadores; isso acarreta a reduo da distncia entre os componentes e, consequentemente, o aumento da velocidade. Entretanto, os ganhos reais de velocidade obtidos nos ltimos anos so devido, principalmente, a mudanas na organizao do processador, incluindo o uso intensivo de pipeline1 e de tcnicas de execuo paralelas de instrues2. comum classi car os computadores em gerao, de acordo com a tecnologia bsica de hardware empregada. Cada nova gerao caracterizada por computadores com maior velocidade, maior capacidade de memria e menor tamanho que os computadores da gerao anterior. Nas subsees seguintes sero apresentadas as caractersticas e computadores que marcaram as principais geraes de computadores.
1.1.1- Computadores eletrnicos 1 Gerao Essa gerao caracterizada pelo uso da tecnologia a vlvula
O Projeto ENIAC (Computador e integrador Numrico Eletrnico Electronic Numerator, Integrator, Analyzer, and Computer), desenvolvido na Universidade da Pensilvnia entre 1943 e 1946 foi o primeiro computador eletrnico de propsito geral. O projeto foi uma resposta s necessidades dos Estados Unidos diante da guerra. O Laboratrio de Pesquisas Balsticas do Exrcito Americano, rgo responsvel por desenvolver tabelas de trajetria e alcance para as novas armas, vinha encontrando di culdades em obter essas tabelas com preciso e tempo hbil. Sem elas as novas armas de artilharia seriam inteis. O Laboratrio empregava mais de 200 pessoas que, utilizando calculadoras de mesa, resolviam as equaes de balsticas. A preparao das tabelas para uma nica arma consumia vrias horas de trabalho de uma pessoa, at mesmo dias. Esse computador, desenvolvido por John W. Mauchly, J. Presper Eckert e equipe. Pesava cerca de 30 toneladas, ocupava o espao de aproximadamente 140 metros quadrados, continha mais de 18 mil vlvulas3 e apresentava um consumo de 140 quilowatts de energia eltrica. Essa mquina era muito mais rpida
1 Tcnica de hardware na qual o ciclo de busca-decodi cao-execuo de instrues dividido em etapas processadas simultaneamente. Essas instrues so colocadas em uma la de memria (dentro da CPU) onde aguardam o momento de serem executadas. Essa tcnica utilizada para acelerar a velocidade de operao da CPU, uma vez que a prxima instruo a ser executada est normalmente armazenada dentro da CPU e no precisa ser buscada da memria, normalmente muito mais lenta que a CPU. 2 Computao paralela uma forma de computao em que vrios clculos so realizados simultaneamente, operando sob o princpio de que grandes problemas geralmente podem ser divididos em problemas menores, que ento so resolvidos concorrentemente (em paralelo). 3 Vlvula um tubo de vidro do qual foi praticamente tirado todo o gs, criando um ambiente de vcuo, contendo eletrodos e grades metlicas, cuja nalidade controlar o uxo de eltrons. As vlvulas transformam sinais eltricos em zeros e uns. um dispositivo que conduz corrente eltrica em um s sentido
Evoluo e Arquitetura de Computadores
que qualquer computador eletromecnico, sendo capaz de executar 5 mil adies por segundo. Dados podiam ser inseridos atravs de cartes perfurados, que tambm eram utilizados para sada. A mquina operava a 100 quilohertzs. Em Fevereiro de 1946, o ENIAC (Figura 1.1) foi revelado para o pblico, e no vero daquele mesmo ano foi oferecido o curso Theory and Techniques for Design of Electronic Computers, com aulas por Eckert, Mauchly, Stibitz, von Neumann, e Aiken, entre outros. Vrios novos projetos surgiram a partir desse curso.
Figura 1.1 - O ENIAC (preenchia esta sala)
O ENIAC era uma mquina decimal e no uma mquina binria; ou seja, a representao dos nmeros era feita na base decimal, a qual era utilizada tambm para a realizao das operaes aritmticas. A memria consistia em 20 acumuladores, cada um dos quais capazes de armazenar um nmero decimal de 10 dgitos.
Os computadores eletrnicos, apesar de representar grande avano em relao a seus similares eletromecnicos, apresentavam duas grandes limitaes: baixa capacidade de memria e longo tempo de programao.
A principal desvantagem do ENIAC era a programao manual atravs do ligamento e desligamento de chaves e conexo e desconexo de cabos, o que exigia dias de trabalho. O processo de programao poderia ser extremamente facilitado se o programa pudesse ser representado de maneira adequada, de modo que fosse armazenado na memria, juntamente com os dados. Assim, o computador poderia obter as instrues diretamente, a partir da memria, e um programa poderia ser carregado ou modi cado simplesmente atribuindo valores a posies de memria.
O marco para quebrar essa barreira foi a concepo do conceito de programa armazenado, associada ao projeto EDVAC (Computador Varivel Discreto Eletrnico Eletronic Discrete Variable Automatic Computer), um sucessor do ENIAC com ampla capacidade de memria e que utilizava aritmtica binria.
A construo do EDVAC foi concluda em 1952, com cerca de 4000 vlvulas, 10000 diodos a cristal, e 1024 palavras de 44 bits em memria com uma velocidade de relgio de 1 Mega Hertz. Atribui-se normalmente a autoria do conceito de programa armazenado a von Neumann, exclusivamente. O motivo que von Neumann escreveu um relatrio de 101 pginas sobre o projeto EDVAC, em junho de 1945, onde o conceito formalmente descrito pela primeira vez. Embora o EDVAC tenha sido concludo apenas em 1952, algumas sugestes sobre o conceito de programa armazenado foram apresentadas durante a escola de vero do ENIAC. Isso permitiu que alguns participantes dessa escola, trabalhando em projetos mais modestos, viessem a construir computadores com programa
Evoluo e Arquitetura de Computadores
armazenado antes da concluso do EDVAC. Tais mquinas incluem:
Manchester Baby Machine, da Universidade de Manchester (Inglaterra), de junho de 1948, por M. Newman e F.C.Williams; EDSAC (Electronic Delay Storage Automatic Calculator), da Universidade de Cambridge (Inglaterra), de maio de 1949, por Maurice Wilkes; BINAC (Binary Automatic Computer), da Eckert-Mauchly Computer Corporation (EMCC), operacional em Setembro de 1949; UNIVAC (Universal Automatic Computer), da Remington Rand Co. (que incorporou a EMCC), com a primeira unidade operacional em maro de 1951; Whirlwind, do MIT por Jay Forrester, projetado como o primeiro computador para aplicaes temporeal. O Whirlwind tornou-se a base para projetos de minicomputadores; IBM 701, voltado para aplicaes cient cas, foi o primeiro computador eletrnico da IBM (dezembro 1952); IBM 650 Magnetic Drum Computer, apresentado como o modelo barato da IBM, anunciado em 1953. Essa mquina foi a base para o modelo IBM 1401 (transistorizado, anncio em outubro de 1959, entrega no incio de 1960).
1.1.2 - Computadores transistorizados 2 Gerao A primeira mudana nos computadores veio com a substituio da vlvula pelo transistor. O transistor menor, mais barato e dissipa menos calor do que a vlvula e, assim como uma vlvula, tambm pode ser utilizado para a construo de computadores.
Ao contrrio da vlvula, que requer o uso de os, placas de metal, cpsula de vidro e vcuo, o transistor um dispositivo de estado slido feito de silcio. O transistor foi desenvolvido no Bell Labs em 1947, e iniciou uma revoluo na indstria eletrnica nos anos 50. Entretanto, apenas no nal da dcada de 50, computadores totalmente transistorizados tornaram-se comercialmente disponveis. Os computadores dessa gerao tornaram-se con veis o su ciente para serem fabricados e vendidos para clientes com a expectativa de que continuariam a funcionar por tempo su ciente para realizar algum trabalho til. Essas mquinas eram guardadas em salas especiais com ar condicionado. Somente grandes corporaes ou importantes rgos do governo ou universidades podiam arcar com seu preo (na casa dos milhes de dlares). Sem sistema operacional muito tempo era perdido entre o trmino de uma tarefa e o incio de outra. Quando em execuo, uma tarefa detinha todo o controle da mquina. As funes de um Sistema Operacional de primeira gerao evoluram da necessidade de liberar o programador dos aspectos fsicos da mquina. A srie IBM7000 marcou a entrada da IBM no mercado de computadores transistorizados. Uma das caractersticas inovadoras nesses produtos era a utilizao de processadores de entrada e sada (I/O Processors). As caractersticas genricas destes primeiros computadores transistorizados incluam memrias a ncleo de ferrite e tambores magnticos, linguagens de programao de alto nvel, o FORTRAN, e o conceito de sistemas de computadores. O desenvolvimento de vrias dessas mquinas contribuiu para a organizao do sistema que hoje esto presentes em muitos computadores. Memria virtual foi introduzida no sistema Atlas (Inglaterra, 1962); o conceito de uma famlia de sistemas com perifricos compatveis foi introduzido com o IBM System360 (1964).
Evoluo e Arquitetura de Computadores
O uso de transistores criou a segunda gerao de computadores. 1.1.3 - Computadores com circuitos integrados 3 Gerao
Durante a dcada de 50 e incio dos anos 60, os equipamentos eletrnicos eram compostos basicamente de componentes discretos transistores, resistores, capacitores e assim por diante. Esses componentes eram fabricados separadamente, encapsulados em seus prprios recipientes e soldados ou ligados com os, por meio de uma tcnica conhecida como wire-up, s placas de circuito, que eram ento instaladas nos computadores, osciloscpios e outros equipamentos eletrnicos. Quando um dispositivo eletrnico requeria um transistor, um pequeno tubo de metal com uma pea de silcio tinha de ser soldado a uma placa de circuito. O processo completo de fabricao, desde o transistor at a placa de circuito era caro e incmodo. Isso comeava a criar problemas na indstria de computadores. Os computadores do incio da segunda gerao continham cerca de 10 mil transistores. Esse nmero cresceu at centenas de milhares, tornando cada vez mais difcil a fabricao de mquinas novas, mais poderosas.
Em 1958, foi desenvolvida uma nova tcnica que revolucionou os equipamentos eletrnicos e iniciou a era da microeletrnica: a inveno do circuito integrado. Esse circuito caracteriza a terceira gerao de computadores.
Por volta de 1965, a IBM anunciou o computador IBM 360, construdo nos USA, totalmente transistorizado e tinha uma capacidade de memria base de 32K bytes. O IBM 360 era uma srie de mquinas compatveis ao nvel de software. Como todas as mquinas tinham a mesma arquitetura e conjunto de instrues, programas escritos para uma mquina podiam executar em todas as outras (pelo menos na teoria). A memria era construda com toros de ferrite (xido de ferro). o primeiro computador IBM a utilizar 8 bits para codi cao de caracteres e a palavra byte assume ento o signi cado que ainda hoje tem. Com 8 bit era possvel codi car 256 estados diferentes o que era su ciente para a codi cao dos 10 algarismos, 52 letras (maisculas e minscula) do alfabeto, o espao, 27 smbolos e 166 caracteres especiais. o primeiro computador IBM que podia ser comandado a partir da digitao de caracteres numa mquina de escrever. Ao IBM 360 podiam ser acoplados leitores/perfuradores de cartes de 80 colunas, unidades de ta magntica, e uma impressora de caracteres que dispunha de uma cadeia metlica. A dcada de 1970 foi marcada pela utilizao de circuitos integrados em larga escala; pelo minicomputador, com extenso uso de circuitos em chips; pelos dispositivos de memria dinmica de 1 Kbit e 4 Kbit (1974) e pelos microprocessadores Intel 8086 (1978), de 16 bits e Motorola 68000 (1979), de 16/32 bits. Algumas funes espec cas, como unidades de gerncia de memria (MMU) e co-processadores aritmticos, passaram tambm a ser implementados em hardware. Em 1971 a IBM lana o disco exvel um disco plstico de oito polegadas recoberto com xido de ferro. Niklaus Wirth cria, em 1971, uma linguagem simblica, o PASCAL tendo em vista o ensino das tcnicas de programao e d origem tcnica de Programao Estruturada. Basic foi uma linguagem originalmente criada para o aprendizado e teve seu uso bastante reduzido j na dcada de 70.
1.1.4 - ltimas geraes
A partir da terceira gerao de computadores, existe um menor consenso sobre a de nio das demais geraes de computadores. Com a introduo de integrao em grande escala (Large-Scale Integration - LSI), mais de mil componentes podem ser colocados em uma nica pastilha de circuito integrado. A integrao em escala muito grande (Very-Large-Scale Integration - VLSI) atingiu mais de 10 mil componentes por pastilha, e as pastilhas VLSI atuais podem conter mais de 100 mil componentes. Com o rpido avano da tecnologia, a introduo signi cativa de novos produtos e a importncia do
Evoluo e Arquitetura de Computadores
software e das comunicaes, tanto quanto do hardware, a classi cao em geraes torna-se menos clara e menos signi cativa. Pode-se dizer que a aplicao comercial dos novos desenvolvimentos representou uma grande mudana no incio dos anos 70 e que os resultados dessas mudanas ainda esto sendo sentidos.
Em 1984, a companhia Apple lanou uma mquina que introduziria novamente uma revoluo: o Macintosh. Este era o sucessor de um modelo chamado Lisa (1 computador com interface totalmente gr ca) mas que no teve aceitao devido seus custo e sua escassa capacidade - introduzia pela primeira vez o conceito de interface gr ca, a analogia de um escritrio e um novo perifrico: o mouse. 1.2 -Arquiteturas de computadores
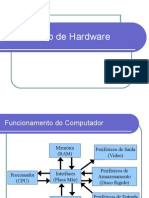
Apesar da existncia de uma grande diversidade em termos de arquiteturas de computador, possvel enumerar num ponto de vista mais genrico, os componentes bsicos desta classe de equipamentos. A Figura 1.2 apresenta um esquema de um computador, destacando os elementos que o compem. Apesar da grande evoluo ocorrida na rea de informtica desde o aparecimento dos primeiros computadores, o esquema apresentado na gura pode ser utilizado tanto para descrever um sistema computacional atual como as mquinas de John Von Neuman.
Figura 1.2- Organizao bsica de um computador
No projeto de sistemas computacionais os principais componentes considerados so: processadores, memrias, dispositivos de entrada e sada, e meios de interconexo. Processadores: controlam a operao do computador e desempenham funes de processamento de dados. Memrias: armazenam dados e so divididas em memria principal e memria secundria. Dispositivos de entrada e sada (E/S): transferem dados entre o computador e o ambiente externo. Em geral, so lentos quando comparados com o processador. Meios de interconexo: mecanismos que estabelecem a comunicao entre a CPU, memria principal e dispositivos E/S. Um problema crtico na utilizao dos meios de interconexo a conteno, a disputa pelo uso simultneo de recursos compartilhados.
1.2.1 - Mquinas von Neumann
Johann von Neumann, matemtico hngaro, e seus colegas comearam um projeto de programa armazenado, conhecido como IAS. O IAS, concludo em 1952, constitui os princpios de funcionamento de todos os computadores de propsito geral subsequentes.
A caracterstica de mquinas von Neumann a composio do sistema a partir de trs subsistemas bsicos: CPU, memria principal e sistema de entrada e sada.
10
Evoluo e Arquitetura de Computadores
A CPU (unidade central de processamento), por sua vez, tem trs blocos principais: unidade de controle (UC), unidade lgico-aritmtica (ALU) e registradores, incluindo-se a um registrador contador de programa (PC) que indica a posio da instruo a executar. So caractersticas das mquinas von Neumann a utilizao do conceito de programa armazenado, a execuo seqencial de instrues e a existncia de um caminho nico entre memria e unidade de controle (Figura 1.3).
Figura 1.3- Arquitetura de mquinas von Neumann.
Durante sua operao, a execuo de um programa uma seqncia de ciclos de mquina von Neumann, compostos 2 subciclos: 1. Busca da instruo (fetch): transfere instruo da posio de memria apontada por PC para a CPU. 2. Execuo da instruo: a unidade de controle decodi ca a instruo e gerencia os passos para sua execuo pela ALU. O computador IAS tinha um total de 21 instrues que podem ser agrupadas como a seguir:
Transferncia de dados: os dados so transferidos entre a memria e os registradores da ULA ou entre dois registradores da ULA. Desvio incondicional: normalmente a unidade de controle executa as instrues na sequncia em que se encontram na memria. Essa sequencia de instrues pode ser alterada por uma instruo de desvio. Isto usado para executar sequncias de instrues repetidamente. Desvio condicional: o desvio efetuado dependendo do teste de uma condio, o que permite a introduo de pontos de deciso. Aritmtica: operaes executadas pela ULA. Alterao de endereo: possibilita calcular endereos, utilizando a ULA, para ento inseri-los em instrues armazenadas na memria. Isto permite ao programa uma considervel exibilidade de endereamento.
Evoluo e Arquitetura de Computadores
11
Problemas com a Arquitetura de Von Neumann: H apenas um barramento de dados e um de endereo. As Instrues e os dados ocupam o mesmo endereamento de memria. As Instrues e os dados trafegam pelo mesmo barramento (barramento de Dados).
2.
A UNIDADE CENTRAL DE PROCESSAMENTO CPU
2.1 - Estrutura e funcionamento da CPU
Um equvoco ocorre ao chamar o gabinete do microcomputador, seja ele em formato vertical ou horizontal, de CPU. O mais correto cham-lo mesmo de gabinete.
A sigla CPU vem do ingls Central Prossessing Unit Unidade Central de Processamento, para designar o componente ou o conjunto de componentes do computador responsvel pela execuo das instrues dos programas.
Nas mquinas de primeira e segunda gerao, as CPUs eram implementadas em circuitos de grandes dimenses, utilizando milhares de vlvulas ou transistores. A partir dos anos 70, com o aparecimento do circuito integrado, as CPUs puderam ser implementadas completamente num chip, denominado a partir de ento de microprocessador, nome at hoje utilizado e que incorpora, em sua famlia, exemplares como o Pentium e o Power PC entre outros menos populares, mas nem por isso menos poderosos. Para entender a organizao da CPU, devemos considerar as aes que ela deve executar: Busca de instruo: a CPU l uma instruo da memria. Interpretao de instruo: a instruo decodi cada para determinar a ao requerida. Busca de dados: a execuo de uma instruo pode requerer leitura de dados da memria ou de um mdulo de E/S. Processamento de dados: a execuo de uma instruo pode requerer efetuar uma operao aritmtica ou lgica sobre os dados. Escrita de dados: os resultados da execuo podem requerer escrever dados na memria ou em um mdulo de E/S.
12
Evoluo e Arquitetura de Computadores
Figura 2.1- Estrutura interna da CPU.
Na maior parte dos estudos dos microprocessadores, encontra-se uma diviso clssica de sua estrutura interna considerando trs grandes unidades (como pode ser visualizado na Figura 2.1):
Unidade Lgica e Aritmtica ou ALU (Aritmethic and Logic Unit), que assume todas as tarefas relacionadas s operaes lgicas (Ou, E, negao, etc.) e aritmticas (adies, subtraes, etc.), ou seja, efetua o processamento de dados; Unidade de Controle (UC) a responsvel pela interpretao das instrues de mquina a serem executadas pelo computador, pela transferncia de dados e instrues para dentro e para fora da CPU; a sincronizao destas instrues. Esta unidade assume toda a tarefa de controle das aes a serem realizadas pelo computador, comandando todos os demais componentes de sua arquitetura, garantindo a correta execuo dos programas e a utilizao dos dados corretos nas operaes que as manipulam. A UC contm as instrues da CPU para executar comandos. O conjunto de instrues, embutido nos circuitos da UC, uma lista de todas as operaes que a CPU capaz de executar. Cada instruo acompanhada de um microcdigo instrues bem bsicas que dizem CPU como executar a instruo. Quando o computador roda um programa, ele procura os comandos que deve executar no conjunto de instrues da CPU e executa-os na ordem indicada. Registradores: para executar operaes, a CPU necessita armazenar alguns dados temporariamente. Ela deve manter a posio de memria da ltima instruo, para sabe aonde obter a prxima instruo e precisa tambm armazenar instrues e dados temporariamente, enquanto uma instruo est sendo executada. Em outras palavras, a CPU necessita de uma pequena rea de armazenamento que constituda de um conjunto de posies de armazenamento denominadas registradores.
Os registradores podem ser:
De propsito geral: utilizado, por exemplo, para as operaes de movimentao de dados e operaes lgicas e aritmticas. Especiais: so registradores com funes espec cas para determinados ns. So exemplos de registradores especiais: Acumulador (ACC): localizado na UC, o principal registrador dentro de um processador, participando da maioria das operaes lgicas e aritmticas, sendo em geral fonte de um dos operandos, e destino dos resultados das operaes, alm de participar das operaes de entrada e sada de dados. O acumulador um dos principais elementos que de nem o tamanho da palavra do computador - o tamanho da palavra igual ao tamanho do acumulador.
Evoluo e Arquitetura de Computadores
13
O Registrador de instruo (IR): contm a ltima instruo buscada. O Contador do Programa: (Program Counter - PC): um registrador que armazena o endereo de memria do incio da prxima instruo a ser executada. O Registrador de endereamento memria (MAR): contm o endereo de uma posio de memria. Registrador de armazenamento temporrio de dados (MBR): contm uma palavra de dados a ser escrita na memria ou a palavra lida mais recentemente.
A Figura 2.1 ilustra os caminhos de transferncia de dados e sinais de controle, o que inclui um elemento denominado barramento interno da CPU. Esse elemento necessrio para transferir dados entre os vrios registradores e a ULA, uma vez que esta ltima apenas opera sobre dados localizados na memria interna da CPU. A gura mostra ainda os elementos bsicos tpicos de uma ULA.
Note a semelhana entre a estrutura interna do computador como um todo e a estrutura interna da CPU. Em ambos os casos, existe uma pequena coleo de elementos importantes (computador: CPU, E/S, memria; CPU: unidade de controle, ULA, registradores), conectados por caminhos de dados.
2.2 - Evoluo da CPU
Apesar de o processador ser o componente mais importante do micro, j que ele quem processa quase todas as informaes, ele no necessariamente o maior responsvel pelo desempenho. Na verdade, dependendo da aplicao qual o micro se destina, o desempenho do processador pode ser menos importante que a quantidade de memria RAM, que o desempenho da placa de vdeo 3D, ou at mesmo que o desempenho do disco rgido. Tenha em mente que o computador um conjunto, cada componente depende dos demais para mostrar o seu potencial. Dizemos que um micro to rpido quanto seu componente mais lento. Como estamos falando de um conjunto, apenas um componente que apresente um baixo desempenho ser su ciente para colocar tudo a perder. Assim como vemos em outras situaes, em um carro, por exemplo, onde um simples pneu furado pode deixar o carro parado na estrada. Se o micro tiver pouca memria RAM, por exemplo, o sistema operacional ser obrigado a usar memria virtual, limitando a performance ao desempenho do disco rgido, que centenas de vezes mais lento que ela. Caso o micro no possua memria cache, o desempenho car limitado ao desempenho da memria RAM, que muito mais lenta que o processador e por a vai. Dizemos neste caso, que o componente de baixo desempenho um gargalo, pois impede que o conjunto manifeste todo o seu potencial. s vezes, simplesmente aumentar a quantidade de memria RAM, operao que custa relativamente pouco, capaz de multiplicar a velocidade do micro. Mas, apesar de tudo, o processador ainda o componente bsico de qualquer computador. Com o avano cada vez mais rpido da tecnologia, e vrias empresas disputando o mercado, os projetistas vem sendo obrigados a desenvolver projetos cada vez mais ousados a m de produzir os processadores com o melhor desempenho. Isso excelente para ns, mas tambm pode trazer armadilhas, j que com projetos to diferentes, cada processador acaba saindo-se bem em algumas aplicaes, mas muito mal em outras. No d para julgar o desempenho do processador apenas pela frequncia de operao, como fazamos na poca do 486. Quando vamos comprar um processador, a primeira coisa que perguntamos qual sua frequncia de operao, medida em Megahertz (MHz) ou milhes de ciclos por segundo, frequncia tambm chamada de clock. Acontece, que nem sempre um processador com uma velocidade de operao mais alta mais rpido
14
Evoluo e Arquitetura de Computadores
do que outro que opera a uma frequncia um pouco mais baixa. A frequncia de operao de um processador indica apenas quantos ciclos de processamentos so realizados por segundo, o que cada processador capaz de fazer em cada ciclo j outra histria. Imagine um processador 486 de 100 MHz, ao lado de um Pentium tambm de 100 MHz. Apesar da frequncia de operao ser a mesma, o 486 perderia feio em desempenho. Na prtica, o Pentium seria pelo menos 2 vezes mais rpido. Isto acontece devido a diferenas na arquitetura dos processadores e tambm no coprocessador aritmtico e cache. Existem muitos tipos de microprocessadores no mercado, podendo-se encontrar grandes variaes tanto no custo como no desempenho de cada um. As principais diferenas entre os tipos de microprocessadores esto relacionadas ao:
Tamanho da palavra; Velocidade; Quantidade operaes que ele suporta
Um parmetro importante o tamanho da palavra processada pela unidade lgica e aritmtica, lembrando que o sistema de numerao adotado nas arquiteturas de computadores o binrio, o qual tem como unidade bsica de informao o bit, que pode assumir os valores 0 ou 1. Quanto maior o tamanho da palavra manipulada pelo microprocessador, maior o seu potencial de clculo e maior a preciso das operaes realizadas. As primeiras CPUs integradas num nico chip, como por exemplo, o 4004 fabricado pela Intel em 1971 manipulava palavras (dados e instrues) expressas por 4 dgitos binrios. Os microprocessadores mais recentes so capazes de manipular palavras entre 32 bits (caso dos 486) e 64 bits (Pentium e Power PC). A Figura 2.2 ilustra exemplos de microprocessadores.
Figura 2.2 - Processadores: Pentium III, Pentium 4 (Socket 423), Pentium 4(Socket 478), Athlon.
A velocidade de clculo est diretamente relacionada com a freqncia do relgio que pilota o circuito da CPU como um todo. O microprocessador Intel 4004 era movido por um clock de freqncia igual a 108 KHz, enquanto hoje fala-se em microprocessadores com clocks de GHz. Ainda relacionada com a ULA, possvel destacar a quantidade de operaes que ela suporta. Os primeiros processadores suportavam um conjunto relativamente modesto de operaes lgicas e aritmticas. Em particular, no que diz respeito s operaes aritmticas, os primeiros processadores suportavam apenas operaes de adio e subtrao, sendo que as demais operaes tinham de ser implementadas atravs de seqncias destas operaes bsicas. Os processadores suportando um conjunto mais complexo de instrues surgiram graas adoo da tecnologia CISC (Complex Instruction Set Computer).
Embora no seja um aspecto visvel ou perceptvel internamente, importante destacar que o aumento do potencial de clculo de um computador s foi incrementado devido evoluo da microeletrnica que tem oferecido tcnicas de integrao capazes de encapsular uma quantidade cada vez maior de transistores por unidade de rea.
Evoluo e Arquitetura de Computadores
15
S para que se tenha um parmetro, o Intel 4004 possua 23000 transistores integrados no mesmo chip, enquanto dos chips da linha Pentium abrigam cerca de 6 milhes de transistores.
2.3 - Coprocessador aritmtico e memria cache
A funo do coprocessador aritmtico justamente auxiliar o processador principal no clculo de funes complexas, cada vez mais utilizadas, principalmente em jogos. como um matemtico pro ssional que ajuda o processador a resolver os problemas mais complexos, que ele demoraria muito para resolver sozinho. At o 386, o coprocessador era apenas um acessrio que podia ser comprado parte e instalado num encaixe apropriado da placa me, sendo que cada modelo de processador possua um modelo equivalente de coprocessador. O problema nesta estratgia que como poucos usurios equipavam seus micros com coprocessadores aritmticos, a produo destes chips era baixa, e consequentemente os preos eram altssimos, chegando ao ponto de em alguns casos o coprocessador custar mais caro que o processador principal. Com o aumento do nmero de aplicativos que necessitavam do coprocessador, sua incorporao ao processador principal a partir do 486DX foi um passo natural. Com isso, resolveu-se tambm o problema do custo de produo dos coprocessadores, barateando o conjunto. Atualmente, o desempenho do coprocessador determina o desempenho do micro em jogos e aplicativos gr cos em geral, justamente as aplicaes onde os processadores atuais so mais exigidos. O desempenho do coprocessador uma caracterstica que varia muito entre os processadores atuais. Enquanto os processadores tornaram-se quase 10 mil vezes mais rpidos desde o 8088 (o processador usado no XT), a memria RAM, sua principal ferramenta de trabalho, pouco evoluiu em performance. Quando foram lanados os processadores 386, percebeu-se que as memrias no eram mais capazes de acompanhar o processador em velocidade, fazendo com que muitas vezes ele tivesse que car esperando os dados serem liberados pela memria RAM para poder concluir suas tarefas, perdendo muito em desempenho. Se na poca do 386 a velocidade das memrias j era um fator limitante, imagine o quanto este problema no atrapalharia o desempenho dos processadores que temos atualmente. Para solucionar este problema, comeou a ser usada a memria cache, um tipo ultra-rpido de memria que serve para armazenar os dados mais frequentemente usados pelo processador, evitando na maioria das vezes que ele tenha que recorrer comparativamente lenta memria RAM. Sem ela, o desempenho do sistema car limitado velocidade da memria, podendo cair em at 95%!. So usados dois tipos de cache, chamados de cache primrio, ou cache L1 (level 1), e cache secundrio, ou cache L2 (level 2). Veja mais detalhes sobre memria cach na seo 3.1.2.
2.4 - Modo Real x Modo Protegido
Todos os processadores atuais podem alternar entre o modo real e o modo protegido livremente, sempre que necessrio. No modo real, rodamos o MS-DOS e outros aplicativos de modo real mais antigos, enquanto no modo protegido rodamos o Windows e seus programas. Com certeza, alguma vez ao tentar rodar um programa antigo, voc j se deparou com uma enigmtica mensagem de falta de memria, apesar dos manuais do programa dizer que ele precisa apenas de 500 ou 600 KB de memria e voc ter instalado bem mais do que isso. Estas mensagens surgem por que estes programas rodam com o processador operando em modo real onde, como o 8086, ele capaz de reconhecer apenas o primeiro Megabyte da memria RAM. Este primeiro Megabyte por sua vez, subdividido em dois blocos, chamados de memria convencional e memria estendida. A memria convencional corresponde aos primeiros 640 Kbytes da memria, e a rea de memria usada pelos programas que operam em modo real. Os 384 Kbytes restantes so chamados de memria superior, e so reservados para armazenar uma cpia do BIOS, que passa a ser executado mais rapidamente, j que a memria RAM muito mais rpida do que o chip de memria ROM ou Flash onde ele originalmente armaze-
16
Evoluo e Arquitetura de Computadores
nado. Esta cpia do BIOS chamada de Shadow, ou sombra, e serve para aumentar o desempenho geral do sistema. A memria superior tambm usada para armazenar sombras dos BIOS de outros dispositivos, como placas de vdeo, aumentando tambm a velocidade de operao destes perifricos. Apesar de existirem 640 Kbytes de memria convencional, pronta para ser usada por qualquer programa que opere em modo real, nem toda esta memria ca disponvel, j que parte dela usada pelo MS-DOS e drivers de dispositivos de modo real. possvel liberar mais memria convencional, editando os arquivos de inicializao do DOS, conseguindo assim rodar estes programas. Quando o computador ligado, o processador est operando em modo real. Quem d o comando para que ele mude para o modo protegido o sistema operacional. No caso do Windows, este comando dado durante o carregamento do sistema. Em modo protegido, o processador capaz de reconhecer toda a RAM instalada no sistema, alm de incorporar recursos como a multitarefa e a memria virtual em disco. neste modo que usamos a interface gr ca do Windows e rodamos seus aplicativos. O modo protegido traz basicamente trs novos recursos: memria virtual, multitarefa, proteo de memria.
2.4.1 Memria Virtual
A capacidade de trabalhar com vrios aplicativos ao mesmo tempo (multitarefa) realmente muito til, mas esta caracterstica traz um pequeno problema: abrindo vrios aplicativos sucessivamente, logo a memria RAM do sistema se esgota. Para corrigir este problema, o modo protegido traz tambm a Memria Virtual A memria virtual, que permite criar um arquivo temporrio no disco rgido, chamado de Swap File, ou arquivo de troca, que funciona como uma extenso da memria RAM, permitindo abrir quantos aplicativos forem necessrios, at que o espao do disco rgido se esgote. Por exemplo, s o Windows 2000 Professional, junto com os servios bsicos ocupa cerca de 40 MB de memria. Se voc abrir o Word 97, sero necessrios mais 10 Megabytes, um total de quase 50 MB. Caso o micro em questo possua apenas 32 MB de memria, seria criado um arquivo temporrio de 18 MB no disco rgido, que armazenaria os dados que no couberam na memria RAM. O problema em usar memria virtual que o disco rgido centenas de vezes mais lento do que a memria RAM. Um disco rgido razovel possui um tempo de acesso em torno de 10 milessegundos (milsimos de segundo) enquanto um mdulo de memria PC-100 possui um tempo de acesso inferior a 10 nanossegundos (bilionsimos de segundo), ou seja, um tempo de acesso um milho de vezes menor. Em termos de taxa de transferncia, novamente temos um contraste marcante: 800 MB para o mdulo de memria e de 5 a 20 MB (dependendo do modelo) para o disco rgido. No Windows 3.x, era necessrio reservar uma quantidade espao do disco rgido para a memria virtual, quantidade que podia ser con gurada livremente atravs do Painel de Controle. O problema que este espao cava indisponvel. Se voc possusse um disco de 800 MB, e reservasse 200 para a memria virtual, caria com apenas 600 MB para instalar programas e guardar arquivos. Se por outro lado, voc reservasse pouco espao para a memria virtual, caria com pouca memria para abrir vrios programas e trabalhar com arquivos grandes. A partir do Windows 95 este problema foi resolvido com a adoo de um arquivo de troca dinmico, que vai aumentando ou diminuindo de tamanho conforme a necessidade de memria, evitando o desperdcio de espao em disco que tnhamos no Windows 3.x. A partir do Windows 95, existe tambm uma administrao mais racional dos recursos do sistema, movendo os arquivos mais importantes, acessados com mais frequncia para memria RAM (ou memria cache, dependendo da importncia do arquivo), e deixando apenas arquivos
Evoluo e Arquitetura de Computadores
17
usados mais raramente no arquivo de troca. Esta simples medida diminui bastante a perda de desempenho causada pelo uso da memria virtual.
2.4.2 - Multitarefa
Multitarefa signi ca executar mais de uma tarefa de cada vez. Do ponto de vista de um computador este processo relativamente simples. Todos os aplicativos so carregados na memria e o processador passa a executar algumas instrues de cada aplicativo por vez. Como o processador capaz de executar vrios milhes de instrues por segundo, esta troca feita de maneira transparente, como se os aplicativos estivessem realmente sendo executados ao mesmo tempo. Enquanto o processador d ateno para um aplicativo, todos os demais cam paralisados, esperando sua vez.
2.4.3 -Memria Protegida
Usando a multitarefa, quase sempre teremos vrios aplicativos carregados na memria, seja na memria RAM ou no arquivo de troca. Se no houvesse nenhum controle por parte do processador, um aplicativo poderia expandir sua rea de memria, invadindo reas de outros aplicativos e causando travamentos no micro. Um editor de imagens, por exemplo, precisa ocupar mais memria conforme as imagens vo sendo abertas ou criadas. Sem nenhuma orientao por parte do processador, simplesmente seriam ocupadas as reas adjacentes, que poderiam tanto estar vazias, quanto estar ocupadas pelo processador de textos, por exemplo. Para colocar ordem na casa, foi desenvolvido o recurso de proteo de memria, que consiste no processador isolar a rea de memria ocupada por cada aplicativo, impedindo que ele ocupe outras reas ao seu bel prazer. Se, por acaso, o programa precisar de mais memria, o prprio processador ir procurar uma rea vazia de memria e ordenar ao aplicativo que ocupe a rea reservada.
2.5 - Clock
Clock um sinal usado para sincronizar coisas dentro do computador. Observe a Figura 2.3, onde mostramos um tpico sinal de clock: uma onda quadrada passando de 0 a 1 a uma taxa xa. Na Figura 2.3 voc pode ver trs ciclos de clock (pulsos) completos. O incio de cada ciclo quando o sinal de clock passa de 0 a 1; ns marcamos isso com uma seta. O sinal de clock medido em uma unidade chamada Hertz (Hz), que o nmero de ciclos de clock por segundo. Um clock de 100 MHz signi ca que em um segundo existem 100 milhes de ciclos de clock.
Figura 2.3 - Sinal de clock
No computador, todas as medidas de tempo so feitas em termos de ciclos de clock.
Por exemplo, uma memria RAM com latncia 5 signi ca que vai levar cinco ciclos de clock completos para comear a transferncia de dados. Dentro da CPU, todas as instrues precisam de um certo nmero de ciclos de clock para serem executadas. Por exemplo, uma determinada instruo pode levar sete ciclos de clock para ser completamente executada. No que diz respeito ao processador, o interessante que ele sabe quantos ciclos de clock cada instruo vai demorar, porque ele tem uma tabela que lista essas informaes. Ento se h duas instrues para serem executadas e ele sabe que a primeira vai levar sete ciclos de clock para ser executada, ele vai automaticamente comear a execuo da prxima instruo no 8 pulso de clock. claro que esta uma explicao genrica
18
Evoluo e Arquitetura de Computadores
para um processador com apenas uma unidade de execuo processadores modernos possuem vrias unidades de execuo trabalhando em paralelo e podem executar a segunda instruo ao mesmo tempo em que a primeira, em paralelo. A isso chamado de arquitetura superescalar.
Se voc comparar dois processadores completamente idnticos, o que estiver rodando a uma taxa de clock mais alta ser o mais rpido. Neste caso, com uma taxa de clock mais alta, o tempo entre cada ciclo de clock ser menor, ento as tarefas sero desempenhadas em menos tempo e o desempenho ser mais alto. Mas quando voc compara dois processadores diferentes, isso no necessariamente verdadeiro.
Como dissemos, cada instruo demora um certo nmero de ciclos de clock para ser executada. Digamos que o processador A demore sete ciclos de clock para executar uma determinada instruo, e que o processador B leve cinco ciclos de clock para executar essa mesma instruo. Se eles estiverem rodando com a mesma taxa de clock, o processador B ser mais rpido, porque pode processar essa instruo em menos tempo. Os fabricantes de processadores comearam a usar um novo conceito, chamado multiplicao de clock, que comeou com o processador 486DX2. Com esse esquema, que usado em todos os processadores atualmente, o processador tem um clock externo tambm conhecido como FSB (Front Side Bus), que usado quando dados so transferidos de e para a memria RAM (usando o chip da ponte norte), e um clock interno mais alto, que indica a frequncia na qual o processador trabalha.
A grande diferena entre o clock interno e o clock externo em processadores modernos uma grande barreira a ser transposta visando aumentar o desempenho do computador.
Diversas tcnicas so usadas para minimizar o impacto dessa diferena de clock. Um deles o uso de memria cache dentro do processador. Outra transferir mais de um dado por pulso de clock. Apesar das limitaes, o recurso de multiplicao de clock indispensvel atualmente, pois sem ele seria impossvel desenvolver processadores muito rpidos, j que no possvel aumentar a frequncia das placas me e dos demais perifricos na mesma proporo do aumento do clock nos processadores. Se o Pentium III, por exemplo, tivesse que trabalhar na mesma frequncia da placa me, no passaramos de 100 ou 133 MHz.
2.6 - Pipeline de instrues
Uma pipeline (paralelismo) de instrues tcnica de implementao de processadores que permite a sobreposio temporal das diversas fases de execuo das instrues.
O pipeline aumenta o nmero de instrues executadas simultaneamente e a taxa de instrues iniciadas e terminadas por unidade de tempo. Mas, no reduz o tempo gasto para completar cada instruo individualmente.
Por exemplo: vamos supor uma lavanderia, em que cada etapa possa ser realizada em 30 minutos:
1. Colocar a roupa na mquina de lavar 2. Depois de lavada, coloc-la na mquina de secar roupa 3. Depois de seca, passar a ferro 4. Depois de passada, arrum-la no armrio
Supondo-se que cada uma destas etapas leve 30 minutos para ser realizada, a lavagem de um cesto de
Evoluo e Arquitetura de Computadores
19
roupas continuar levando 2 horas para ser realizada. Entretanto, podemos iniciar a lavagem de um cesto de roupas a cada 30 minutos, at que tenhamos 4 cestos sendo lavados simultaneamente, um em cada etapa do pipeline. Depois das primeiras 2 horas, teremos um cesto de roupa lavada a cada 30 minutos. Ao nal do dia teremos lavado muito mais cestos de roupa do que sem o uso de pipeline.
(a) Viso simpli cada
(b) Viso expandida Figura 2.4 Pipeline de instrues de dois estgios
Suponha que o processamento de uma instruo dividido em dois estgios: busca e execuo de instruo. Existem momentos durante a execuo de uma instruo em que a memria principal no est sendo usada. Esse instante pode ser usado para buscar a prxima instruo, em paralelo com a execuo da instruo corrente. A Figura 2.4(a) representa essa abordagem. A pipeline tem dois estgios independentes. O estgio busca uma instruo e armazena em uma rea de armazenamento temporrio. Quando o segundo estgio est livre, o primeiro passa para ele a instruo. Isso chamado de busca antecipada de instruo ou superposio de busca. Note que o processo acelera a execuo da instruo. Se os estgios de busca e de execuo tiverem a mesma durao, o nmero de instrues executadas por unidade de tempo ser dobrado. Entretanto se examinarmos essa pipeline, Figura 2.4(b), veremos que essa duplicao da taxa de execuo de instrues ser pouco provvel por duas razes:
O tempo de execuo geralmente maior que o tempo de busca, pois a execuo de uma instruo geralmente envolve leitura e armazenamento de operandos e execuo de algumas operaes. A ocorrncia de instruo de desvio condicional faz com que o endereo da prxima instruo a ser buscada seja desconhecido. Nesse caso, o estgio de busca teria de esperar at receber o endereo da prxima instruo do estgio de execuo. O estgio de execuo poderia, ento, ter que esperar enquanto a prxima instruo buscada.
Para reduzir o tempo perdido com a ocorrncia de instrues de desvio, o tempo perdido pode ser reduzido pela seguinte regra: quando uma instruo de desvio condicional passada do estgio de busca para o de execuo, o estgio de busca obtm na memria a instruo imediatamente seguinte instruo de desvio. Ento se no ocorrer desvio, nenhum tempo ser perdido. Se ocorrer desvio, a instruo buscada deve ser descartada, sendo buscada uma nova instruo. Para conseguir maior desempenho, um pipeline deve ter maior nmero de estgios, como:
20
Evoluo e Arquitetura de Computadores
S1: Unidade de busca de instruo; S2: Unidade de decodi cao de instruo; S3: Unidade de busca de operando; S4: Unidade de execuo de instruo; S5: Unidade de gravao.
Figura 2.5 Pipeline de cinco estgios executando 9 instrues
Um pipeline de cinco estgios, conforme Figura 2.5, pode reduzir o tempo de execuo de 9 instrues de 45 para 13 unidades de tempo. Suponhamos que o tempo de ciclo desta mquina de 2 ns (nano segundos), sendo assim uma instruo levaria 10 ns para percorrer todos os 5 estgios do pipeline. Como uma instruo demora 10 ns, parece mquina poderia funcionar em 100 MIPS (milhes de instrues por segundo). Como a cada 2 ns uma instruo concluda, temos ento uma velocidade real de processamento de 500 MIPS (tempo do ciclo X quantidade de estgios que executam simultaneamente). So caractersticas dos pipelines de instruo:
O tempo do ciclo do relgio do processador deve ser igual ou maior que o tempo de execuo do estgio mais lento do pipeline. Deve-se procurar dividir a execuo da instruo em estgios com o mesmo tempo. O pipeline deve ser mantido sempre cheio para que o desempenho mximo seja alcanado. De um modo geral, com o uso do pipeline, cada instruo ainda leva o mesmo tempo para ser executada. Algumas instrues, contudo, podem ter o seu tempo de execuo aumentado, pois atravessam estgios em que no realizam nenhuma operao til. Problemas no uso de pipelines
Evoluo e Arquitetura de Computadores
21
Estgios podem ter tempos de execuo diferentes O sistema de memria incapaz de manter o uxo de instrues no pipeline Con itos estruturais: pode haver acessos simultneos memria feitos por 2 ou mais estgios Dependncias de dados: as instrues dependem de resultados de instrues anteriores. Dependncias de controle: a prxima instruo no est no endereo subseqente ao da instruo anterior.
Tempo de ciclo (tau) de uma pipeline
m: atraso mximo de estgio (atraso por meio do estgio de maior atraso); k: nmero de estgio da pipeline de instruo; d: tempo necessrio para propagar sinais e dados de um estgio para o prximo; O tempo de atraso d equivalente ao pulso de um relgio e m>>d. O tempo total Tk requerido para executar as n instrues, sem desvio, : Tk= [k + (n-1)] Aplicando Figura 2.4, temos: Tk =[5+(9-1)] = 13.
2.7 - Arquiteturas CISC e RISC Quando um novo microprocessador criado, aumenta-se o seu conjunto de instrues, para que se torne mais poderoso. Por outro lado, quanto mais instrues o microprocessador contm, mais lento ele car, pois ser maior sua tabela geral onde esto listados todos os tipos de instruo que o processador pode executar (conjunto de instrues) e a procura de uma determinada instruo e a sua efetiva execuo dentro do micro-cdigo demora mais tempo para nalizar.
Quando uma instruo dada ao microprocessador, uma parte existente dentro dele chamada decodi cador de instrues trata de veri car se aquela vlida (conferindo conjunto de instrues) e, em caso positivo, ele executa o subprograma referente a tal instruo dentro do micro-cdigo (rea do microprocessador encarregado por armazenar pequenos programas). Microprocessadores com essas caractersticas so denominadas CISC - Complex Instruction Set Computer - Computao utilizando um conjunto Complexo de instrues. Com o aumento do conjunto de instrues e do micro-cdigo, o processador ca sicamente maior e mais lento e novos recursos de aumento de desempenho devem ser criados para ultrapassar esta lentido. Para compensar essa demora, novos recursos (como o cache de memria, integrao dos circuitos de apoio dentro do microprocessador, entre outros) so utilizados para aumento de desempenho. Surpreendentemente, apesar de existir um conjunto de instrues grande, apenas 20% delas so usadas por programas e sistemas operacionais.
22
Evoluo e Arquitetura de Computadores
Com isso, surgiu uma nova idia: a construo de microprocessadores com um conjunto reduzido de instrues e a sua padronizao (instrues CISC no so padronizadas), a completa eliminao do decodi cador de instrues e, principalmente, do micro-cdigo. Microprocessadores construdos com a idia acima mencionada so classi cados como RISC (Reduced Instruction Set Computing Computao utilizando um conjunto Reduzido de instrues). No entanto microprocessadores RISC so incompatveis com os CISC. Ento para que sejam compatveis foi utilizada uma arquitetura hbrida CISC/RISC, que consiste em adicionar um decodi cador CISC na entrada do ncleo RISC.
Ao contrrio dos complexos CISC, os processadores RISC so capazes de executar apenas algumas poucas instrues simples. Justamente por isso, os chips baseados nesta arquitetura so mais simples e muito mais baratos.
indiscutvel que em instrues complexas os processadores CISC saem-se melhor. Por isso, ao invs da vitria de uma das duas tecnologias, atualmente vemos processadores hbridos, que so essencialmente processadores CISC, mas incorporam muitos recursos encontrados nos processadores RISC (ou vice-versa).
Filoso a da arquitetura RISC: transferir complexidade das operaes para software, mantendo em hardware apenas as operaes primitiva
Por questes de Marketing, muitos fabricantes ainda vendem seus chips, como sendo Processadores RISC, porm no existe praticamente nenhum processador atualmente que siga estritamente uma das duas loso as. Tanto processadores da famlia x86, como o Pentium II, Pentium III e AMD Athlon, quanto processadores supostamente RISC, como o MIPS R10000 e o HP PA-8000, ou mesmo o G4, utilizado nos Macintoshs misturam caractersticas das duas arquiteturas, por simples questo de desempenho. Examinando de um ponto de vista um pouco mais prtico, a vantagem de uma arquitetura CISC que j temos muitas das instrues guardadas no prprio processador, o que facilita o trabalho dos programadores, que j dispem de praticamente todas as instrues que sero usadas em seus programas. No caso de um chip estritamente RISC, o programador j teria um pouco mais de trabalho, pois como disporia apenas de instrues simples, teria sempre que combinar vrias instrues sempre que precisasse executar alguma tarefa mais complexa. Seria mais ou menos como se voc tivesse duas pessoas, uma utilizando uma calculadora comum, e outra utilizando uma calculadora cient ca. Enquanto estivessem sendo resolvidos apenas clculos simples, de soma, subtrao, etc. quem estivesse com a calculadora simples poderia at se sair melhor, mas ao executar clculos mais complicados, a pessoa com a calculadora cient ca disporia de mais recursos. Nos chips atuais, que so na verdade misturas das duas arquiteturas, juntamos as duas coisas. Internamente, o processador processa apenas instrues simples. Estas instrues internas variam de processador para processador, so como uma luva, que se adapta ao projeto do chip. As instrues internas de um K6 so diferentes das de um Pentium por exemplo. Sobre estas instrues internas, temos um circuito decodi cador, que converte as instrues complexas utilizadas pelos programas em vrias instrues simples que podem ser entendidas pelo processador. Estas instrues complexas so iguais em todos os processadores usados em micros PC. isso que permite que um Athlon e um Pentium III sejam compatveis entre si. O conjunto bsico de instrues usadas em micros PC chamado de conjunto x86. Este conjunto composto por um total de 187 instrues, que so as utilizadas por todos os programas. Alm deste conjunto principal, alguns processadores trazem tambm instrues alternativas, que permitem aos programas executar algumas tarefas mais rapidamente do que seria possvel usando as instrues x86 padro. Alguns exemplos de conjuntos alternativos de instrues so o MMX (usado a partir do Pentium MMX), o 3D-NOW! (usado pelos processadores da AMD, a partir do K6-2), e o SSE (suportado pelo Pentium III)
Evoluo e Arquitetura de Computadores
23
3.
MEMRIAS
Todo computador dotado de uma quantidade (que pode variar de mquina para mquina) de memria a qual se constitui de um conjunto de circuitos capazes de armazenar (por perodos mais curtos ou mais longos de tempo) as unidades de dados e os programas a serem executados pela mquina. Nos computadores de uso geral, possvel encontrar diferentes denominaes para as diferentes categorias de memria que neles so encontradas. As memrias so classi cadas em dois grandes grupos: memrias primrias e memrias secundrias. Do ponto de vista do usurio, as duas caractersticas mais importantes da memria so sua capacidade e seu desempenho. Os parmetros empregados para medir o desempenho so:
Tempo de Acesso: o perodo de tempo gasto decorrido desde o instante em que foi iniciada a operao de acesso at que a informao requerida (instruo ou dado) tenha sido efetivamente transferida. Pode ser chamado tempo de acesso para leitura ou simplesmente tempo de leitura. Tempo de ciclo de memria: esse conceito aplicvel principalmente a memrias de acesso aleatrio e compreende o tempo de acesso e o tempo adicional requerido antes que um segundo acesso possa ser iniciado. Taxa de transferncia: a taxa na qual os dados podem ser transferidos de ou para a unidade de memria.
A capacidade diz respeito quantidade de informao que pode ser armazenada em uma memria; a unidade de medida mais comum o byte, embora tambm possam ser usadas outras unidades como clulas (no caso da memria RAM e cache), setores (no caso de discos) e bits (no caso de registradores). As Unidades de medida mais usadas para quanti car a memria e indicar a capacidade de armazenamento so os mltiplos do byte:
1MB (Megabyte) 1024KB = 1.048.576 bytes 1GB (Gigabyte) 1024MB = 1.073.741.824 bytes 1TB (Terabyte) 1024GB = 1.099.511.627.776 bytes
Devido a variedade de tipos de memria, no possvel implementar um sistema de computao com uma nica memria. Na realidade, h muitas memrias no computador, as quais se interligam de forma bem estruturada, constituindo um sistema em si, parte do sistema global de computao, podendo ser denominado subsistema de memria, como mostrado na Figura 3.1.
Figura 3.1 Hierarquia de memria
24
Evoluo e Arquitetura de Computadores
A Figura 3.1 mostra a hierarquia de memrias. medida que descemos na hierarquia, as relaes a seguir so vlidas:
O custo por bit diminui A capacidade aumenta O tempo de acesso aumenta A freqncia de acesso memria pelo processador diminui
Outra forma de diferenciao entre os tipos de memria o mtodo de acesso aos dados, podendo ser:
Acesso seqencial: aquele em que conjuntos de dados e informaes dispostos seqencialmente na memria em unidades denominadas registros so acessados linearmente, um aps o outro. O acesso seqencial tipicamente usado em dispositivos de armazenamento que utilizam ta magntica. Em toda memria que admite acesso seqencial existe um o mecanismo de leitura (geralmente tambm usado para a escrita) que percorre a memria linearmente, passando seqencialmente de registro em registro, identi cando cada um deles, at localizar o registro que se deseja consultar ou alterar. Acesso direto: feito em dois passos. O primeiro um acesso aleatrio a uma vizinhana genrica do bloco de bytes a ser lido (geralmente, um setor). O segundo um acesso seqencial (em geral por contagem de blocos) at identi car aquele que deve ser lido. Acesso aleatrio: signi ca que qualquer posio de memria principal, ou unidade enderevel, pode ser acessada diretamente, selecionada por seu endereo, seja ele qual for. O acesso independe da ordem, da posio relativa ou de qualquer outro fator. Dessa maneira, qualquer posio pode ser selecionada de modo aleatrio, sendo endereada e acessada diretamente. A memria principal e alguns sistemas de memria cache utilizam esse tipo de acesso. Acesso associativo: consiste em um tipo de acesso aleatrio que possibilita comparar simultaneamente certo nmero de bits de uma palavra com todas as palavras da memria, determinando quais dessas palavras contm o mesmo padro de bits. Uma palavra buscada na memria com base em uma parte do seu contedo, e no de acordo com o seu endereo. Assim como no aleatrio, cada posio da memria possui seu mecanismo de endereamento prprio e o tempo de busca constante e independente da posio ou do padro dos acessos anteriores. As memrias cache podem empregar acesso associativo.
Os conceitos a seguir dizem respeito s caractersticas das memrias:
Palavra: unidade natural de organizao da memria. O tamanho de uma palavra tipicamente igual ao nmero de bits usados para representar um nmero inteiro e ao tamanho da instruo. Unidade enderevel: em muitos sistemas a unidade enderevel a palavra. Entretanto, alguns sistemas permitem o endereamento de bytes. Em qualquer um dos casos, a relao entre o tamanho em bits A de um endereo e o nmero de unidades endereveis N : 2A = N.
O sistema de memria de computadores pode ser mais facilmente compreendido por meio da sua classi cao, de acordo com suas caractersticas fundamentais. As caractersticas mais importantes esto relacionadas na Tabela 3.1.
Evoluo e Arquitetura de Computadores
25
Tabela 3.1 caractersticas fundamentais de sistemas de memria de computadores
Localizao
Processador
Interna (principal) Externa (secundria)
Tamanho da palavra
Capacidade
Tempo de acesso Tempo de ciclo Taxa de transferncia De semicondutores Magntica tica Magneto-tica
Desempenho
Tecnologia
Unidade de transferncia Mtodo de acesso
Seqencial Direto
Aleatrio Associativo
Nmero de palavras Palavra Bloco
Caractersticas fsicas
Voltil/no voltil Apagvel/no apagvel
Organizao
3.1- Memrias primrias
As memrias de armazenamento primrio, tambm denominadas memrias internas so pequenas reas de armazenamento que esto incorporadas ao hardware do computador. Fisicamente, essas memrias consistem em alguns chips na placa-me ou em pequenas placas de circuitos ligadas placa-me ou esto localizadas dentro do processador.
So memrias que o processador pode enderear diretamente, sem as quais o computador no pode funcionar. Estas fornecem geralmente uma ponte para as secundrias, mas a sua funo principal a de conter a informao necessria para o processador num determinado momento; esta informao pode ser, por exemplo, os programas em execuo.
Alguns chips de memria retm os dados neles armazenados, mesmo quando o computador desligado, essa memria chamada de no-voltil. Outros chips perdem seu contedo quando o computador desligado, essa memria chamada de voltil. Entre as memrias primrias esto: RAM (voltil), ROM (no-voltil), CACHE, memria CMOS e registradores.
3.1.1 - Memria RAM
A memria RAM (Random Access Memory) a principal memria na qual so gravados os dados para o processamento. A RAM uma memria voltil. A tecnologia das memrias RAM pode ser dividida em esttica (SRAM) e dinmica (DRAM). Uma memria RAM dinmica feita de clulas que armazenam dados com carga de capacitores. A presena ou ausncia de carga em um capacitor interpretada como representao do dgito binrio 1 ou 0. Como um capacitor tem tendncia natural para se descarregar, a RAM dinmica requer uma regenerao de carga peridica para manter os dados armazenados. Na memria RAM esttica, os valores binrios so armazenados usando conguraes tradicionais de ip- ops 4 com portas lgicas. A memria RAM esttica mantm seus dados enquanto houver fornecimento de energia. Tanto a memria RAM esttica quanto a dinmica so volteis. A DRAM mais simples e, portanto, menor do que a SDRAM. Dessa maneira, uma RAM dinmica mais densa (clulas menores implicam mais clulas por unidade de rea) e mais barata do que uma RAM esttica correspondente. Por outro lado, ela requer um circuito de regenerao. No caso de memrias de grande capacidade, o custo xo do circuito de regenerao compensado pelo custo menor das clulas da RAM dinmica. Portanto, as RAMs dinmicas tendem a ser mais
4 O ip- op ou multivibrador biestvel um circuito digital pulsado capaz de servir como uma memria de um bit.
26
Evoluo e Arquitetura de Computadores
vantajosas quando a capacidade de memria requerida maior. Uma observao nal que as RAMs estticas so, em geral, mais rpidas do que as dinmicas. O grande desenvolvimento ocorrido na rea de software, particularmente no que diz respeito ao uso de interfaces gr cas e, mais recentemente, das aplicaes multimdias, tem forado os fabricantes de componentes de computador a produzirem circuitos de memria cada vez mais poderosos. Em termos de hardware so pequenos pentes que so encaixados nos slots de memria das placas-me. A capacidade total de memria depende do pente e do nmero de slots na placa-me. A velocidade de funcionamento de uma memria medida em Hz e seus mltiplos. Este valor est relacionado com a quantidade de blocos de dados que podem ser transferidos durante um segundo. Existem, no entanto algumas memrias RAM que podem efetuar duas transferncias de dados no mesmo ciclo de relgio, duplicando a taxa de transferncia de informao para a mesma freqncia de trabalho. A Figura 3.2 ilustra dois modelos distintos de memria RAM.
Figura 3.2 - Memria DDR OCZ e memria SDR Value Selet, mostradas da esquerda para a direita
3.1.2 - Memria cache
O processador muito mais rpido do que a memria RAM. Isso faz com que que subutilizado quando ele precisa enviar muitos dados consecutivamente. Ou seja, durante grande parte do tempo no processa nada, apenas esperando que a memria que pronta para enviar novamente os dados. Para fazer com que o processador no que subutilizado quando envia muitos dados para RAM, utilizada uma mais rpida, chamada memria cache, que outro tipo de memria, chamada de memria esttica ou simplesmente SRAM (Static RAM). Um circuito controlador l os dados da memria RAM e os copia para a memria cache. Se o processador precisar de alguns dados, estes estaro no cache ou na RAM.
Com a utilizao da memria cache, o computador ca mais rpido, pois no h espera ao receber e enviar dados do processador com a RAM e vice-versa
A memria cache encontrada em dois tipos:
Memria cache L1 - Presente dentro do microprocessador ou cache interno. dividida em duas partes, uma para dados outra para instrues. Memria cache L2 - Presente na placa-me ou at dentro do processador, no caso de processadores mais novos. Quando externo, o seu tamanho depende do chipset presente na placa-me.
Sempre que o processador precisar ler dados, os procurar primeiro no cache L1. Caso o dado seja encontrado, o processador no perder tempo, j que o cache primrio funciona na mesma frequncia que ele. Caso o dado no esteja no cache L1, ento o prximo a ser indagado ser o cache L2. Encontrando o que procura no cache secundrio, o processador j perder algum tempo, mas no tanto quanto perderia caso precisasse acessar diretamente a memria RAM.
Evoluo e Arquitetura de Computadores
27
Por outro lado, caso os dados no estejam em nenhum dos dois caches, no restar outra sada seno perder vrios ciclos de processamento esperando que eles sejam entregues pela lenta memria RAM. Para exempli car, imagine que voc estivesse escrevendo um e-mail e que precisasse de uma informao que voc havia anotado em um papel. Se o papel estivesse sobre sua mesa, voc poderia l-lo sem perder tempo. Se estivesse dentro de uma gaveta da sua mesa, j seria necessrio algum tempo para encontr-lo enquanto se ele estivesse perdido em algum lugar de um enorme chrio do outro lado da sala, seria preciso um tempo enorme. Antigamente, era comum as placas mes virem com soquetes apropriados, que permitiam ao usurio adicionar mais memria cache caso quisesse. Os mdulos adicionais, chamados de mdulos COAST (cache on a stick) eram relativamente acessveis, levando muita gente a fazer o upgrade. Entretanto, atualmente esta possibilidade no existe mais, pois a grande maioria dos processadores j trazem o cache L2 integrado, no permitindo qualquer modi cao, j que no d para abrir o processador e soldar mais cache. Mesmo no caso de processadores que ainda usam cache embutido na placa me, como o K6-2, no existe mais o encaixe para adicionar mais cache. Ou seja, atualmente a quantidade de cache que voc deseja no processador ou placa me deve ser decidida antes da compra, baseado nas opes disponveis. Uma vez adquiridos o processador e a placa me no ser possvel fazer qualquer alterao.
Sempre que um novo processador desenvolvido, preciso desenvolver tambm um tipo mais rpido de memria cache para acompanh-lo. Como este tipo de memria extremamente caro (chega a ser algumas centenas de vezes mais cara que a memria RAM convencional) usa-se apenas uma pequena quantidade dela.
3.1.3 - Memria ROM
A memria ROM (acrnimo para a expresso inglesa Read-Only Memory) um tipo de memria que permite apenas a leitura, ou seja, as suas informaes so gravadas pelo fabricante uma nica vez e aps isso no podem ser alteradas ou apagadas, somente acessadas. So memrias cujo contedo gravado permanentemente. Uma memria ROM (Figura 3.3) propriamente dita tem o seu contedo gravado durante a fabricao. Atualmente, o termo Memria ROM usado informalmente para indicar uma gama de tipos de memria que so usadas apenas para a leitura na operao principal de dispositivos eletrnicos digitais, mas possivelmente podem ser escritas por meio de mecanismos especiais. Os principais tipos de memria ROM so:
PROM (Programmable Read-Only Memory): esse um dos primeiros tipos de memria ROM. A gravao de dados neste tipo realizada por meio de aparelhos que trabalham atravs de uma reao fsica com elementos eltricos. Uma vez que isso ocorre, os dados gravados na memria PROM no podem ser apagados ou alterados; EPROM (Erasable Programmable Read-Only Memory): as memrias EPROM tm como principal caracterstica a capacidade de permitir que dados sejam regravados no dispositivo. Isso feito com o auxlio de um componente que emite luz ultravioleta. Nesse processo, os dados gravados precisam ser apagados por completo. Somente depois disso que uma nova gravao pode ser feita; EEPROM (Electrically-Erasable Programmable Read-Only Memory): este tipo de memria ROM tambm permite a regravao de dados, no entanto, ao contrrio do que acontece com as memrias EPROM, os processos para apagar e gravar dados so feitos eletricamente, fazendo com que no seja necessrio mover o dispositivo de seu lugar para um aparelho especial para que a regravao ocorra; EAROM (Electrically-Alterable Programmable Read-Only Memory): as memrias EAROM podem ser vistas como um tipo de EEPROM. Sua principal caracterstica o fato de que os dados gravados podem ser alterados aos poucos, razo pela qual esse tipo geralmente utilizado em aplicaes que exigem apenas reescrita parcial de informaes; Flash: as memrias Flash tambm podem ser vistas como um tipo de EEPROM, no entanto, o processo de gravao (e regravao) muito mais rpido. Alm disso, memrias Flash so mais durveis e podem guardar um volume elevado de dados;
28
Evoluo e Arquitetura de Computadores
CD-ROM, DVD-ROM e a ns: essa uma categoria de discos pticos onde os dados so gravados apenas uma vez, seja de fbrica, como os CDs de msicas, ou com dados prprios do usurio, quando o prprio efetua a gravao. H tambm uma categoria que pode ser comparada ao tipo EEPROM, pois permite a regravao de dados: CD-RW e DVD-RW e a ns
Figura 3.3 Chip de memria ROM
Na memria ROM do computador esto armazenados os software: BIOS, Setup e Post.
BIOS (Basic Input Output System, Sistema Bsico de Entrada e Sada), que responsvel por ensinar ao processador da mquina a operar com dispositivos bsicos, como a unidade de disquete, o disco rgido. Setup o programa responsvel por alterar os parmetros armazenados na memria de con gurao (CMOS), normalmente para chamarmos esse programa pressionamos a tecla Del durante a contagem de memria. No setup ns alteramos parmetros que so armazenados na memria de con gurao. Como o setup gravado dentro da memria ROM do micro, muita gente pensa que setup e BIOS so sinnimos, o que no verdade. Outra confuso comum achar que as con gurao alteradas no setup so armazenadas no BIOS. Como o BIOS est numa memria do tipo ROM, ela no permite que seus dados sejam alterados. Todas as informaes manipuladas e alteradas no setup so armazenadas nica e exclusivamente na memria de con gurao (CMOS) do micro. POST (Power On Self Test, Auto-teste) o programa responsvel pelo auto-teste que executado toda a vez em que ligamos o micro (contagem de memria, por exemplo).
3.1.4 - Memria de con gurao CMOS
A memria CMOS (Complementary Metal Oxide Semiconductor) como uma memria RAM, pois permite que os dados sejam lidos e gravados, como uma memria que pode ser apagada, existe uma bateria de ltio especi camente para aliment-la quando o computador est desligado. Essa bateria tambm responsvel por alimentar o circuito de relgio de tempo real do micro (RTC, Real Time Clock), pelo mesmo motivo. Todo micro tem esse relgio e ele o responsvel por manter a data e a hora atualizadas. A Figura 3.4 ilustra o chip CMOS e a bateria que alimenta essa memria
Figura 3.4 - Chip onde a memria CMOS est embutida e bateria que alimenta a memria CMOS, respectivamente.
Evoluo e Arquitetura de Computadores
29
3.1.5 - Registradores
O registrador ou registro um tipo de memria de pequena capacidade, porm muito rpida contida no processador, utilizada no armazenamento temporrio durante o processamento. Os registradores esto no topo da hierarquia de memria, sendo assim o meio mais rpido e caro de se armazenar um dado. Os registradores so utilizados na execuo de programas de computadores, disponibilizando um local para armazenar dados. Na maioria dos computadores modernos, quando da execuo das instrues de um programa, os dados so movidos da memria principal para os registradores, ento as instrues que utilizam estes dados so executadas pelo processador, e nalmente, os dados so movidos de volta para a memria principal.
3.2 - Memrias secundrias So memrias que no podem ser endereadas diretamente, por exemplo, a informao precisa ser carregada em memria primria antes de poder ser tratada pelo processador No so estritamente necessrias para a operao do computador So geralmente no-volteis, permitindo guardar os dados permanentemente
As memrias secundrias podem ser classi cadas segundo material no qual os dados so armazenados, ou seja, o tipo de mdia de armazenamento. Segundo as mdias de armazenamento, essas memrias so classi cadas em:
Memrias de mdia magntica: os dispositivos de armazenamento mais comuns so o disquete, discos rgidos e unidade de ta. A superfcie desses dispositivos revestida de um material com sensibilidade magntica (em geral, xido de ferro), que reage a um campo magntico. Assim como o transistor representa dados binrios como ligado ou desligado, a fora de um campo magntico pode ser usada para representar dados. Mas o m tem uma vantagem importante sobre o transistor: ele retm a polaridade sem uma fonte contnua de eletricidade. Memrias de mdia tica: as tcnicas de armazenamento tico fazem uso de preciso altssima, possvel graas aos raios laser. O laser usa um feixe de luz estreito e concentrado. A nica diferena entre a luz do laser e a luz comum que no raio laser, a luz coerente toda energia da luz est perfeitamente alinhada na mesma direo, permitindo que seja focalizada com preciso em uma rea extremamente pequena. Os dispositivos de armazenamento tico focalizam um raio laser no meio de gravao, que um disco em constante rotao. Algumas reas do meio re etem a luz pelo laser e pelo sensor, o ponto que re ete o raio laser no sensor interpretado como um e a ausncia de re exo interpretada como zero. Os principais dispositivos que utilizam essa mdia so os CDs e DVDs. Memrias de mdia ash: uma memria de computador do tipo EEPROM (Electrically-Erasable Programmable Read-Only Memory), desenvolvida na dcada de 1980 pela Toshiba, cujos chips so semelhantes ao da memria RAM, permitindo que mltiplos endereos sejam apagados ou escritos numa s operao. Em termos leigos, trata-se de um chip que, ao contrrio de uma memria RAM convencional, do tipo no voltil. Esta memria comumente usada em cartes de memria, ash drives USB (pen drives), MP3 Players, dispositivos como os iPods com suporte a vdeo, PDAs, armazenamento interno de cmeras digitais e celulares. A memria ash oferece um tempo de acesso (embora no to rpido como a memria voltil DRAM utilizadas para a memria principal em PCs) e melhor resistncia do que discos rgidos. Estas caractersticas explicam a popularidade da memria ash em dispositivos portteis. Outra caracterstica da memria ash que quando embalado em um carto de memria so extremamente durveis, sendo capaz de resistir a uma presso intensa, variaes extremas de temperatura, e at mesmo imerso em gua.
3.1.2 - Disco rgido
Disco rgido, disco duro, (popularmente tambm winchester) ou HD (do ingls Hard Disk) a parte do
30
Evoluo e Arquitetura de Computadores
computador onde so armazenadas as informaes, ou seja, a memria permanente propriamente dita (no confundir com memria RAM). caracterizado como memria fsica, no-voltil, que aquela na qual as informaes no so perdidas quando o computador desligado. Este sistema necessrio porque o contedo da memria RAM apagado quando o computador desligado. Desta forma, temos um meio de executar novamente programas e carregar arquivos contendo os dados da prxima vez em que o computador for ligado. Nos sistemas operacionais mais recentes, o disco rgido tambm utilizado para expandir a memria RAM, atravs da gesto de memria virtual5. A Figura 3.5 mostra a parte interna de um HD. Note que h indicativos que descrevem os componentes mais importantes. Estes so detalhados logo abaixo:
Pratos e motor: esse o componente que mais chama a ateno. Os pratos so os discos onde os dados so armazenados. Eles so feitos de alumnio (ou de um tipo de cristal) recoberto por um material magntico e por uma camada de material protetor. Quanto mais trabalhado for o material magntico (ou seja, quanto mais denso), maior a capacidade de armazenamento do disco. Note que os HDs com grande capacidade contam com mais de um prato, um sobre o outro. Eles cam posicionados sob um motor responsvel por faz-los girar; Cabea e brao: os HDs contam com um dispositivo muito pequeno chamado cabea (ou cabeote) de leitura e gravao. Trata-se de um item de tamanho reduzido que contm uma bobina que utiliza impulsos magnticos para manipular as molculas da superfcie do disco, e assim gravar dados. H uma cabea para cada lado dos discos. Esse item localizado na ponta de um dispositivo denominado brao, que tem a funo de posicionar os cabeotes sob a superfcie dos pratos. Olhando por cima, tem-se a impresso de que a cabea de leitura e gravao toca nos discos, mas isso no ocorre. Na verdade, a distncia entre ambos extremamente pequena. A comunicao ocorre por impulsos magnticos; Atuador: tambm chamado de voice coil, o atuador o responsvel por mover o brao sob a superfcie dos pratos, e assim permitir que as cabeas faam o seu trabalho. Para que a movimentao ocorra, o atuador contm em seu interior uma bobina que induzida por ims.
Figura 3.5 - Vista Interna do HD
A superfcie de gravao dos pratos composta de materiais sensveis ao magnetismo (geralmente, xido de ferro). O cabeote de leitura e gravao manipula as molculas desse material atravs de seus plos. Para isso, a polaridade das cabeas muda numa freqncia muito alta: quando est positiva, atrai o plo negativo das molculas e vice-versa. De acordo com essa polaridade que so gravados os bits (0 e 1). No processo de leitura de dados, o cabeote simplesmente l o campo magntico gerado pelas molculas e gera uma
5 O sistema operacional atravs de um software especializado (memria virtual) cria a iluso ao usurio que a memria principal do tamanho da memria secundria. A tcnica de memria virtual realiza transferncia de blocos de informao entre a memria primria e secundria automaticamente sem a interveno do usurio comum. Assim, o tempo de acesso memria principal aumenta um pouco mais, o usurio ganha em capacidade de armazenamento.
Evoluo e Arquitetura de Computadores
31
corrente eltrica correspondente, cuja variao analisada pela controladora do HD para determinar os bits. Para armazenar e localizar dados em um HD, um dispositivo chamado controlador (ou controladora) se utiliza de informaes conhecidas por nmero de trilhas, setores e cilindros. O conjunto dessas informaes denominado geometria de disco. No processo de fabricao do HD existe uma formatao (formatao pode ser entendida como mapeamento) que de ne a forma de armazenamento, dividindo cada disco em trilhas e setores. Os cilindros so trilhas concntricas na superfcie dos discos e estas trilhas so divididas em setores. Estes, por sua vez, so pedaos do HD. Observe na Figura 3.6 para entender melhor sua estrutura.
Figura 3.6 - Trilha e Setores do HD
Existem vrios tipos de discos rgidos: IDE/ATA, Serial ATA, SCSI. ATA, um acrnimo para a expresso inglesa Advanced Technology Attachment, tambm conhecido como IDE (a Figura 3.7 ilustra um conector IDE na placa-me) ou Integrated Drive Electronics um padro para interligar dispositivos de armazenamento, como discos rgidos e drives de CD-ROMs, no interior de computadores pessoais. A evoluo do padro fez com que fossem reunidas vrias tecnologias antecessoras, como: (E)IDE (Extended) Integrated Drive Electronics; ATAPI - Advanced Technology Attachment Packet Interface; UDMA - Ultra DMA.
Figura 3.7 Conector IDE em uma placa-me
Serial ATA, SATA ou S-ATA (acrnimo para Serial Advanced Technology Attachment) uma tecnologia de transferncia de dados entre um computador e dispositivos de armazenamento em massa como unidades de disco rgido e drives pticos. o sucessor da tecnologia ATA que foi renomeada para PATA (Parallel ATA) para se diferenciar de SATA. Diferentemente dos discos rgidos IDE, que transmitem os dados atravs de cabos de quarenta ou oitenta os paralelos, o que resulta num cabo enorme, os discos rgidos SATA transferem os dados em srie. Os cabos do tipo Serial ATA (Figura 3.8) so formados por dois pares de os (um par para transmisso e outro par para recepo) usando transmisso diferencial, e mais trs os terra, totalizando sete os, o que permite usar
32
Evoluo e Arquitetura de Computadores
cabos com menor dimetro que no interferem na ventilao do gabinete.
Figura 3.8 - Slot Serial ATA em uma placa-me e Cabo de alimentao para drives Serial ATA, vistos da esquerda para direita
As principais vantagens sobre a interface do parallel ATA uma maior rapidez na transferncia dos dados (embora a taxa de transferncia anunciada pelos fabricantes - 66 MB/s, 100 MB/s, 133 MB/s - raramente alcanada); e o uso de cabos de conexo mais nos que permitem um resfriamento mais e ciente do gabinete. SCSI (pronuncia-se scuzi), sigla de Small Computer System Interface, trata-se de uma tecnologia criada para acelerar a taxa de transferncia de dados entre dispositivos de um computador, desde que tais perifricos sejam compatveis com a tecnologia. Essa tecnologia permite ao usurio conectar uma larga gama de perifricos, tais como discos rgidos, unidades CD-ROM, impressoras e scanners. As vantagens do SCSI no se resumem apenas questo da velocidade, mas tambm da compatibilidade e estabilidade. Sendo o processador o dispositivo mais rpido do computador, o uso do padro SCSI permite que essa velocidade seja aproveitada e assim, aumentar de forma considervel o desempenho do computador. Essa interface mais voltada para o mercado de servidores de rede e raramente utilizada em computadores para usurios nais. Existe tambm o HD externo que simplesmente um HD porttil que voc conecta ao computador apenas quando precisa. Para isso, pode-se usar, por exemplo, portas USB e at SATA externo, tudo depende do modelo que voc escolher. O HD externo til para quando se tem grandes quantidades de dados para transportar ou para fazer backup (cpia de segurana de seus arquivos). Do contrrio, prefervel utilizar pen drives, DVDs regravveis ou outro dispositivo de armazenamento com melhor relao custo-benefcio. Isso porque os HDs externos so mais caros e costumam ser pesados (exceto os modelos de tamanho reduzido). Alm disso, devem ser transportados com cuidado, para evitar danos.
3.2.2 - Disquetes
Os disquetes possuem a mesma estrutura de um disco rgido, tendo como diferenas o fato de serem removveis e serem compostos de um nico disco magntico. Os disquetes possuem vida til que varia de 5 a 6 anos (pouco, se for comparado ao CD, que dura 20 anos). O disquete j foi considerado um dispositivo com grande capacidade de armazenamento, especialmente devido ao pequeno tamanho dos arquivos. Atualmente, devido ao tamanho cada vez maior dos arquivos e, devido existncia de mdias de armazenamento no-volteis de maior capacidade, como zip drivers, cartes de memria CDs, DVDs; alm de existir outras maneiras de guardar arquivos, como armazenamento distribudo em redes locais, e-mail e disco virtual, o disquete se tornou um utilitrio obsoleto. A Figura 3.9 ilustra as partes que compem um disquete.
Evoluo e Arquitetura de Computadores
33
Figura 3.9 Disquete 3 1/2
Legenda: 1 - Trava de proteo contra escrita. 2 - Base central. 3 - Cobertura mvel. 4 - Chassi (corpo) plstico. 5 - Disco de papel. 6 - Disco magntico. 7 - Setor do disco.
3.2.3 - Fita magntica
A ta magntica (ou banda magntica) uma mdia de armazenamento no-voltil que consiste em uma ta plstica coberta de material magnetizvel. A ta pode ser utilizada para armazenar informaes analgicas ou digitais, incluindo udio, vdeo e dados de computador. A Figura 3.10 ilustra uma ta magntica para dados de computador. As tas esto disponveis em rolos, cassetes ou cartuchos e sofreram diversas evolues desde seu advento, no incio da dcada de 1950. Elas so talvez, a mdia de armazenamento mais antiga ainda amplamente utilizada em sistemas de informao. Quando comparadas aos discos ticos e tico-magnticos, as vantagens das tas so a grande capacidade de armazenamento, o baixo custo por unidade armazenada, a longa expectativa de vida e a con abilidade na reteno dos dados ao longo de sua vida til. Suas desvantagens so: o acesso sequencial (as tas requerem um moroso avano e retrocesso para que sejam acessados os dados desejados), a necessidade de treinar o operador ou usurio para sua manipulao correta e o elevado custo dos dispositivos de leitura/gravao.
Qual o meio de armazenamento digital mais duradouro? No se assuste, mas so as tas magnticas, que tm uma vida til estimada em um sculo. Poucos fabricantes de CDs e DVDs garantem a manuteno de dados gravados em seus produtos por mais do que 10 anos. No toa que todos os dados nanceiros e empresariais continuam sendo arquivados nas con veis tas magnticas.
Figura 3.10 - Fita de dados para computador
34
Evoluo e Arquitetura de Computadores
3.2.4 - Discos ticos
O CD-ROM foi desenvolvido em 1985 e traduz-se aproximadamente em lngua portuguesa para Disco Compacto - memria apenas para leitura. O termo compacto deve-se ao seu pequeno tamanho para os padres vigentes, quando do seu lanamento. E memria apenas para leitura deve-se ao fato de o seu contedo poder apenas ser lido, e nunca alterado. O termo foi herdado da memria ROM, que contrasta com tipos de memria RW, como a memria ash. A gravao feita pelo seu fabricante. Existem outros tipos desses discos, como o CD-R e o CD-RW, que permitem ao utilizador fazer a suas prprias gravaes uma, ou vrias vezes, respectivamente, caso possua o hardware e software necessrios. Os CD-ROMs com capacidade para 650 megabytes, foram substitudos pelos de 700 megabytes, passando ento estes a serem os mais comuns, existindo, no entanto, outros formatos superiores. O DVD (abreviao de Digital Video Disc ou Digital Versatile Disc, em portugus, Disco Digital de Vdeo ou Disco Digital Verstil). Contm informaes digitais, tendo uma maior capacidade de armazenamento que o CD, devido a uma tecnologia tica superior, alm de padres melhorados de compresso de dados. O DVD foi criado no ano de 1995. Os DVDs possuem por padro a capacidade de armazenar 4,7 GB de dados, enquanto que um CD armazena em mdia 700 MB. Os chamados DVDs de dual-layer (dupla camada) podem armazenar at 8,5 GB. O tamanho mximo de arquivo varia conforme o tipo de gravao: UDF, ISO normal, DVD-video, etc. O disco magnticotico (MO) combina algumas das melhores caractersticas das tecnologias de gravao magntica e tica. Uma unidade de disco MO usa um laser tico para aumentar a capacidade do sistema de disco magntico convencional. A tecnologia de gravao fundamentalmente magntica. Entretanto, um laser tico usado para focalizar o cabeote de gravao magntica, possibilitando obter maior capacidade. Os discos MO podem ser encontrados em vrios tamanhos e capacidades. A principal vantagem do disco MO para o CD puramente tico a sua longevidade. Repetidas regravaes no disco tico resultam em degradao gradual do meio. O disco MO no apresenta essa degradao e, portanto pode ser usado para um nmero muito maior de operaes de regravao. Outra vantagem da tecnologia MO seu custo por megabyte, consideravelmente mais baixo do que no caso do disco magntico. Uma tecnologia recente de discos ticos so os discos Blu-ray e HD DVD. Na verdade, um disco Blu-Ray ou HD-DVD nada mais do que um disco de DVD com capacidade de armazenamento mais elevada, permitindo a gravao de contedo de alta de nio. importante salientar que a principal motivao para a criao de um sucessor para o DVD foi o surgimento da TV de alta de nio, que exige maior espao de armazenamento em disco, coisa que o DVD no pode oferecer. O ponto chave das tecnologias Blu-Ray e HD-DVD a utilizao de um laser azul-violeta usado para ler e gravar dados no disco. Este laser tem um comprimento de onda menor do que o laser vermelho usado pelos aparelhos de DVD, o que permite uma maior densidade de gravao. Tecnologicamente falando, Blu-Ray e HD-DVD so parecidos. A diferena principal entre essas duas tecnologias est na capacidade de armazenamento, devido a distncia da camada de gravao em relao camada protetora, que no Blu-Ray de 0,1 mm e no HD-DVD esta distncia de 0,6 mm, a mesma do DVD. Um disco Blu-Ray de uma nica camada permite a gravao de at 25 GB, enquanto que o mesmo disco na tecnologia HD-DVD permite a gravao de apenas 15 GB. J um disco Blu-Ray de dupla camada permite a gravao de at 54 GB, enquanto que o mesmo disco na tecnologia HD-DVD permite apenas a gravao de 30 GB.
3.2.5 - Pen drives
Memria USB Flash Drive, tambm designado como pen drive (Figura 3.11) um dispositivo de armazenamento constitudo por uma memria ash e uma ligao USB tipo A permitindo a sua conexo a uma porta
Evoluo e Arquitetura de Computadores
35
USB de um computador. A velocidade de transferncia de dados pode variar dependendo do tipo de entrada. Eles oferecem vantagens potenciais com relao a outros dispositivos de armazenamento portteis, particularmente os disquetes. So mais compactos, rpidos, tm maior capacidade de armazenamento, so mais resistentes devido ausncia de peas mveis. Adicionalmente, tornou-se comum computadores sem drives de disquete. Portas USB por outro lado, esto disponveis em praticamente todos os computadores pessoais e notebooks. Os drives ash utilizam o padro USB, nativamente compatvel com os principais sistemas operacionais modernos como Windows, Mac OS X, Linux, entre outros. Em condies ideais, as memrias ash podem armazenar informao durante 10 anos. Para ter acesso aos dados armazenados no drive ash, este deve estar conectado ao computador. O drive ca ativo apenas quando ligado porta USB e obtm toda a energia necessria atravs da corrente eltrica fornecida pela conexo.
Figura 3.11 Pen drive
3.2.6 - Cartes de memria
Carto de memria ou carto de memria ash um dispositivo de armazenamento de dados com memria ash utilizado em videogames, cmeras digitais, telefones celulares, palms/PDAs, MP3 players, computadores e outros aparelhos eletrnicos. Podem ser regravados vrias vezes, no necessitam de eletricidade para manter os dados armazenados, so portteis e suportam condies de uso e armazenamento mais rigorosos que outros dispositivos mveis. No mercado, h uma grande variedade de formatos de memria ash, como pode ser visualizado na Figura 3.12.
Figura 3.12 - Modelos diversos de cartes de memria em sentido horrio a partir do topo: CompactFlash, xD-Picture Card, MultiMediaCard e Secure Digital Card.
36
Evoluo e Arquitetura de Computadores
4.
PERIFRICOS DO COMPUTADOR
Os dispositivos de entrada e os de sada a so tambm denominados perifricos do computador. Existem tambm os dispositivos que podem ser utilizados tanto para a entrada como para a sada de dados: os dispositivos de armazenamento (HD, disquete, ta magntica), modems, placas de rede e telas sensveis ao toque.
4.1 - Dispositivos de entrada
Os perifricos de entrada so dispositivos que servem para a entrada de dados em um computador. Como exemplo, temos: teclado, mouse, canetas eletrnicas, telas sensveis ao toque, entre outros. Os subitens seguintes iro detalhar alguns desses dispositivos.
4.1.1 - Teclado
usado para entrada de dados atravs da digitao. O teclado (Figura 4.1) dividido em 3 partes: teclado alfanumrico (semelhante ao de uma mquina de escrever), teclado numrico (semelhante uma calculadora) e teclado de controle (formado por um grupo de teclas, que isoladamente ou em conjunto com outras teclas, executam comandos ou funes espec cas, como as teclas <Shift>, <Ctrl>, <Alt>, entre outras).
Figura 4.1 - Teclado
4.1.2 - Mouse
Tambm conhecido como dispositivo apontador. Serve para apontar e selecionar uma das opes possveis que aparecem na tela. Existem diversos tipos de mouse, mas o modelo mais comum tem o formato de um ratinho, por isso o nome em ingls: mouse. Como dispositivo apontador, tambm encontramos o trackball, que uma espcie de mouse invertido, ou seja, ao invs de rolarmos o mouse pela mesa, simplesmente, giramos sua bolinha com a mo movimentando o cursor na tela; o track point, que composto de um ponto no meio do teclado (geralmente em notebooks); o touch pad ou mouse de toque, onde ao movimentarmos o dedo sobre uma pequena placa, movimentamos o cursor na tela; e os mouses em forma de caneta que tem o mesmo formato de uma caneta, geralmente encontrado em palmtops.
Figura 4.2 Mouse tico, trackBall e caneta eletrnica, vistos da esquerda para a direita
O mouse um dispositivo simples e o tipo mais comum tem uma bola sob a carcaa do mouse propria-
Evoluo e Arquitetura de Computadores
37
mente dito. O mouse tico no tem parte mvel alguma. Em vez da bola, ele tem um fotodetector que percebe o movimento do mouse sobre uma superfcie. O movimento transformado em informao que enviada ao computador, como faz o mouse mecnico.
4.1.3 - Scanner
Trata-se de um dispositivo que serve para transferir desenhos, fotos e textos para o computador. O scanner (Figura 4.3) pode ser de dois tipos: scanner de mo, o qual parecido com um mouse bem grande e que devemos passar por cima do desenho/texto a ser transferido para o computador e scanner de mesa, muito parecido com uma fotocopiadora, onde devemos colocar o papel e abaixar a tampa para que o desenho seja ento transferido para o computador.
Figura 4.3 Scanner
.
4.1.4 - Leitor tico
um dispositivo que serve para evitar os enormes tempos gastos com digitao de dados. Ele como um scanner, s que utilizado, geralmente, para ler cdigos de barra. O leitor de cdigo de barras (Figura 4.4) converte um padro de barras impressas nos produtos em informaes sobre o produto por meio da emisso de raio de luz freqentemente um raio laser que re ete a imagem do cdigo de barra. Um detector sensvel luz identi ca a imagem do cdigo de barra por intermdio das barras especiais em ambas as extremidades da imagem.
Figura 4.4 Leitor tico
4.1.5 - Microfone
Tambm um dispositivo de entrada, pois atravs dele podemos gravar sons, transmitir a nossa voz pela internet ou mesmo ditar um texto para o computador, utilizando um dos programas de reconhecimento de voz.
4.2 - Dispositivos de sada
As unidades de sada convertem impulsos eltricos, permitindo a sada de informaes para meios externos e possibilitando sua visualizao de uma maneira que se torne compreensvel para o usurio, ou seja, servem para que possamos obter os resultados dos dados processados pelo computador. Existem diversos perifricos de sada, vejam alguns deles nas subsees que seguem.
38
Evoluo e Arquitetura de Computadores
4.2.1 - Monitor de Vdeo
Semelhante a um aparelho receptor de televiso, onde so apresentados os dados ou informaes solicitadas pelo usurio (ver Figura 4.5).
Figura 4.5 Monitores CRT e LCD, vistos da esquerda para direita
Dois tipos bsicos de monitor so usados com os computadores. O primeiro o tpico monitor que voc ver nos computadores de mesa; ele se parece muito com uma tela de televiso e funciona da mesma maneira. Esse tipo usa um tubo grande de vcuo, chamado CRT (Cathode Ray Tube- tubo de raios catdicos). O segundo tipo, conhecido como monitor de tela plana comumente usado em notebooks. A maioria deles emprega LCDs (Liquid Crystal Displays vdeos de cristal liquido) para converter as imagens.
4.2.2 - Impressoras
Impressora um equipamento que permite criar cpias em papel de gr cos, textos, desenhos, planilhas e outros trabalhos criados no computador. A resoluo da impressora medida em pontos de tinta por polegada, tambm conhecida como dpi. Geralmente, quanto mais pontos por polegada, melhor ser o resultado impresso. Existem vrios tipos de impressoras. Cada uma delas possui caractersticas espec cas para valorizar a qualidade de imagem produzida. As impressoras (Figura 4.6) podem ser classi cadas em: Impressoras com impacto: utilizam martelos que pressionam uma ta carbono contra o papel de impresso (geralmente os chamados formulrios contnuos), e podem ser de dois tipos:
Impressora serial ou matricial: possuem agulhas ou pinos na cabea de impresso, que percorrem toda a extenso da pgina e que so responsveis pela transferncia da tinta da ta para o papel. (Obs.: quanto maior o nmero de pontos impresso pelas agulhas, melhor ser a de nio do caracter do documento). A impresso feita caracter por caracter; Impressora de linha: que imprime os caracteres de uma linha completa de uma s vez.
As impressoras sem impacto so impressoras silenciosas e so classi cadas em:
Jato de tinta - tm processo semelhante ao das matriciais, pois tambm possuem cabea de impresso que percorre toda a extenso da pgina, s que esta cabea de impresso possui pequenos orifcios, atravs dos quais a tinta do cartucho lanada sobre o papel. Algumas tm uma tima qualidade de impresso quase se igualando s de Laser. So as impressoras mais utilizadas. Fuso trmica ou tambm conhecidas como dye sublimation - usadas em empresas onde a qualidade pro ssional dos documentos, pan etos e apresentaes mais importante que o custo dos consumveis. Possuem uma qualidade pro ssional nas cpias efetuadas, mas o seu custo muito maior do que o das impressoras jato de tinta. Trmicas - embora sejam mais rpidas, mais econmicas e mais silenciosas do que outros modelos de impressoras, as impressoras trmicas praticamente s so utilizadas hoje em dia em aparelhos de fax e mquinas que imprimem cupons scais e extratos bancrios. O grande problema com este mtodo de impresso que o papel trmico utilizado desbota com o tempo.
Evoluo e Arquitetura de Computadores
39
Laser - so impressoras com baixssimo nvel de rudo, possui um processo de impresso idntico ao das fotocopiadoras. Produzem resultados de grande qualidade para quem quer desenho gr co ou texto, utilizando a tecnologia do laser.
Figura 4.6 impressoras lazer, jato de tinta e matricial de recibos, vistas da esquerda para direita
4.2.3 - Plotters
Plotter ou plotadora (Figura 4.7) um tipo especial de dispositivo de sada. Parece uma impressora, porque produz imagens sobre uma folha de papel, mas o processo utilizado diferente. As plotadoras destinam-se a produzir grandes desenhos ou imagens, como plantas para a construo de prdios ou anteprojetos de objetos mecnicos. A plotadora usa um brao robtico para desenhar com canetas coloridas sobre uma folha de papel.
Figura 4.7 - Plotter
4.2.4 - Speakers
Os speakers ou caixas de som servem para transmitir sons atravs do micro, sejam msicas ou sons de voz. So e cazes para usurios com de cincia visual e para software especializados nesse tipo de usurio.
40
Evoluo e Arquitetura de Computadores
5.
OUTROS COMPONENTES DO COMPUTADOR
5.1 - Barramentos
Barramentos so basicamente um conjunto de sinais digitais com os quais o processador comunica-se com o seu exterior, ou seja, com a memria, chips da placa-me, perifricos. Um barramento do sistema contm, tipicamente, de 50 a 100 linhas distintas. Cada linha possui uma funo ou signi cado particular. Embora existam diferentes projetos de barramentos, as linhas de um barramento podem ser classi cadas em trs grupos funcionais (Figura 5.1):
Figura 5.1 Esquema de interconexo de barramento
Barramento de dados linhas por onde circulam os dados. Contm 8,16 ou 32 linhas; o nmero de linhas conhecido como largura do barramento de dados.
A largura do barramento de dados constitui um parmetro fundamental para o desempenho global do sistema
Barramento de endereos linhas por onde a informao de um dado endereo fornecida. Por exemplo, quando o processador deseja ler uma palavra (8, 16 ou 32 bits) na memria, ele coloca o endereo da palavra desejada nas linhas de endereo.
A largura do barramento de endereo determina a capacidade mxima da memria do sistema, quanto maior a largura do barramento de endereo, maior o nmero de posies de memria que podem ser endereadas.
Barramento de controle as linhas de controle so usadas para controlar o acesso e a utilizao das linhas de dados e endereo. Como as linhas de dados e endereo so compartilhadas por todos os componentes, deve existir uma maneira de controlar a sua utilizao. No computador, normalmente, encontramos trs tipos barramento: barramento local; barramento do sistema; barramento de expanso (veja Figura 5.2).
Evoluo e Arquitetura de Computadores
41
Figura 5.2 Arquitetura de barramento tradicional
Barramento local: o principal barramento do micro, e nele esto conectados os principais circuitos da placa-me, tais como: memria RAM, chipsets, processadores, memria cache. Barramento do sistema: barramento onde esto conectados os perifricos on board, ou seja, perifricos integrados placa-me, como placa de som, vdeo, fax-modem e rede. Barramento de expanso: onde esto conectadas as placas de expanso como as placas de vdeo, fax modem, som, rede, IDE, e demais placas. Estas placas so conectadas ao barramento atravs de conectores denominados slots. Vamos conhecer alguns barramentos de expanso: barramento ISA (Figura 5.5), que apesar de no ser mais utilizado com freqncia, esteve presente na maior parte dos computadores, o barramento PCI (Figura 5.4) e o AGP (Figura 5.3), que usado exclusivamente para vdeo. Para que os perifricos (placas em geral) possam usar esses barramentos, necessrio que cada placa (de vdeo, de som, modem) seja compatvel com um determinado tipo de barramento. Sendo assim, para que haja o uso do mesmo, necessrio encaixar a placa num conector presente na placa-me, conhecido por slot. Cada barramento possui uma forma de slot diferente, que ser mostrado nas prximas subsees.
5.1.1- Barramento AGP
O slot AGP (Accelerated Graphics Port) foi criado para otimizar a performance das placa de vdeo. A entrada AGP s pode ser usada por placas de vdeo de acelerao 3D. Existem diferentes velocidades que uma placa AGP pode alcanar, tudo depende de qual a velocidade que a entrada AGP tem. Quando for comprar uma placa-me veja se ela consegue acompanhar a velocidade da placa de vdeo que voc tem, ou vice-versa.
Figura 5.3 Slot de barramento AGP
42
Evoluo e Arquitetura de Computadores
5.1.2 - Barramento PCI
O barramento PCI (Peripheral Component Interconnect) geralmente usado para expanso. Esses slots so os mais usados e uma placa me sempre tem mais de 5 entradas PCI, algumas placas que so vendidas mais baratas geralmente aquelas combos com placa-me e processador embutido tem menos entradas PCI e s vezes nenhuma AGP, ento antes de comprar uma boa placa-me sempre bom ver esse tipo de informao.
Figura 5.4 Slot de barramento PCI
5.1.3 - Barramento ISA
Os slots ISA (Industry Standard Architecture) so os que vieram antes dos slots PCI, mesmo assim ainda existem placas-me que so fabricadas com esses slots. Ela bem mais lenta que a entrada PCI.
Figura 5.5- Slot de barramento ISA
5.1.4 - Barramento USB
Universal Serial Bus (USB) um tipo de conexo Plug and Play que permite a conexo de perifricos sem a necessidade de desligar o computador. A Figura 5.6 ilustra um conector padro USB. Antigamente instalar perifricos em um computador obrigava o usurio a abrir a mquina, o que para a maioria das pessoas era uma tarefa quase impossvel pela quantidade de conexes internas, sem falar que na maioria das vezes era preciso con gurar jumpers 6 e interrupes IRQs 7, tarefa difcil at para prossionais da rea. A proposta do padro USB substituir a in nidade de conectores diferentes empregados nos computadores atuais. Uma rpida olhada em um micro tpico revela no menos que cinco encaixes diferentes, entre portas seriais, paralelas, ligaes para teclado, mouse, joystick e outros acessrios.
6 Jumper uma ligao mvel entre dois pontos de um circuito eletrnico. uma pequena pea plstica que contm um metal, responsvel pela conduo de eletricidade. So pequenos contatos eltricos, envolvidos por um encapsulamento plstico, que servem para programar opes de funcionamento de placas e dispositivos, no que diz respeito ao hardware. 7 Uma IRQ (abreviao para Interrupt Request) a forma pela qual os componentes de hardware requisitam tempo computacional da CPU. Uma IRQ a sinalizao de um pedido de interrupo de hardware (o processador para de fazer o que est fazendo para atender o dispositivo que pediu a interrupo)
Evoluo e Arquitetura de Computadores
43
Figura 5.6 - Conector USB
5.1.5 - Barramento Firewire
O barramento Firewire (tambm conhecido por IEEE 1394) um barramento externo ao micro, similar ao USB. Ou seja, voc pode instalar perifricos Firewire ao micro mesmo com ele ligado. O sistema operacional detecta que um novo perifrico foi adicionado e trata de instalar os drivers necessrios. A grande diferena entre o Firewire e o USB o desempenho. Enquanto que no USB os dados so transferidos a, no mximo, 12 Mbps, na verso atual do Firewire os dados so transferidos a 400 Mbps, ou seja, o Firewire 33 vezes mais rpido do que o USB. O Firewire foi desenvolvido, inclusive, tendo em mente a transferncia de dados grandes, como lmes sendo transferidos em formato digital entre cmeras digitais e o PC, por exemplo. Enquanto que o USB atualmente suportado por todos os chipsets (circuitos de apoio da placa-me) - fazendo com que todas as placas-me do mercado possuam portas USB, quase nenhum chipset para placas-me de PCs suporta o Firewire O cabos que permitem a conexo de dispositivos em uma interface FireWire 400 podem ser compostos por at 6 vias. J no caso do FireWire 800, o cabo pode conter at 9 vias. A Figura 5.7 mostra os conectores e as entradas FireWire que so padro de mercado.
Figura 5.7 Conectores e entradas padro Firewire
5.1.6 - Slots de expanso e adaptadores
Os computadores mais recentes foram projetados para serem abertos e adaptados ou con gurados, de acordo com a necessidade particular de cada usurio. A maioria das placas-me dos computadores tem oito slots de expanso, que servem como extenses do barramento do computador. Esses slots permitem que os componentes que no esto sicamente ligados ou soldados na placa-me obtenham acesso ao barramento do computador. Geralmente, as nicas excees so o teclado e, as vezes o mouse; o soquete do teclado est rmemente soldado na placa-me e alguns computadores tambm tm portas especiais para o mouse na prpria placa-me. A maioria dos PCs vem com dois ou mais slots de expanso ocupados com placas de circuito que tm vrias nalidades. Essas placas so chamadas de adaptadores, cartes ou s vezes simplesmente placas. Os slots de expanso na placa-me so usados pra trs nalidades:
1) Para dar aos dispositivos internos, como discos rgidos e as unidades de disquete, acesso ao barramento do computador via placas controladoras.
44
Evoluo e Arquitetura de Computadores
2) Para oferecer placas de E/S, na parte traseira do computador, para dispositivos externos como monitores de vdeo, modems, placas de redes externas, impressoras e mouses (para computadores que no tenham uma porta interna prpria para esse dispositivo). 3) Para dar aos dispositivos de uso especial acesso ao computador. Por exemplo. A placa de acelerador de clock, que aumenta a velocidade de processamento, um dispositivo independente que obtm acesso CPU e memria do computador por meio do barramento.
Os dois primeiros so funes de E/S. Eles no apenas oferecem uma porta qual os dispositivos podem ser conectados servem de tradutores entre o barramento e o dispositivo em si.
O que fazer com um slot de expanso vago? Talvez voc queira instalar uma placa de som que produza udio de alta qualidade. Essas placas adicionais con guram seu micro para aplicativos de multimdia. Se voc preferir um modem interno em vez do tipo externo (que requer uma porta serial), ele ocupar um slot, e muitos outros dispositivos podem vir com adaptadores que precisam de slots por exemplo, controladores para unidades de ta, scanners requerem um slot para a sua instalao.
5.2 - Portas de comunicao 5.2.1 - Portas seriais e paralelas
Internamente, os componentes do computador comunicam-se em paralelo. A Interface paralela, tambm denominada LPT (Figura 5.8), aquela na qual h oito os ou mais por meio dos quais os bits que representam dados podem uir simultaneamente, como no barramento. O barramento do computador geralmente transfere 16 ou 32 bits simultaneamente; entretanto a interface paralela padro para dispositivos externos, como as impressoras, transfere 8 bits de cada vez em oito os separados. Como a porta paralela muito lenta todos os fabricantes migraram estes perifricos para a porta USB. Na interface serial, tambm denominada COM (Figura 5.8), os bits de dados uem um de cada vez em um nico arquivo. Um chip chamado UART (Universal Assynchronous Receiver-Transmitter receptor-transmissor assncrono universal) na placa de entrada/sada do computador converte os dados paralelos do barramento em dados seriais que podem uir atravs de um cabo serial ou o telefnico. Como de se esperar, a interface paralela pode manipular um volume muito maior de dados do que a interface serial. As portas paralelas tm um conector de 25 pinos do lado do computador. No lado da impressora o cabo paralelo tem um conector especial chamado interface Centronics, que impede que os usurios liguem, inadvertidamente, a extremidade errada do cabo na impressora.
Figura 5.8 interface paralela e serial
Evoluo e Arquitetura de Computadores
45
Exemplos de dispositivos seriais: mouse, trackball e dispositivos apontadores em geral; impressoras (raramente); modems externos. Exemplos de dispositivos paralelos: unidades ticas externas, impressoras (matriciais); plotters; zip drive .
8
5.2.2 - Portas PS/2
PS/2 (Personal System/2) foi um sistema de computador pessoal criado pela IBM em 1987 com um conjunto de interfaces prprias. Um computador PS/2 tinha inmeras vantagens em relao ao PC tradicional, como equipamento (hardware) homologado e todos os drivers escritos pela IBM e um sistema operacional prprio rodando nele, o OS/2. O PS/2 desapareceu do mercado em poucos anos, mas o OS/2 foi continuado para PCs comuns at meados de 1996. Porm, muitas das interfaces de hardware do PS/2 (Figura 5.9) so utilizadas at hoje, por ocuparem menos espao e serem mais rpidas. Por exemplo, quando voc compra uma placa-me, mouse ou teclado PS2 signi ca que voc est usando as interfaces herdadas deste sistema ao invs das portas de comunicao COM usadas na maioria dos PCs.
Figura 5.9 Portas PS/2
5.2.3- Comunicao com transmisso sem o
Infrared: Infrared Data Association (IrDA) um padro de comunicao sem o para transmisso de dados entre dispositivos. Esse padro permite a conexo de dispositivos sem o ao microcomputador (ou equipamento com tecnologia apropriada), tais como impressoras, telefones celulares, notebooks e PDAs. Para computadores que no possuem infravermelho (IRDA) necessrio um adaptador ligado a porta USB do computador, desta maneira este computador poder trocar arquivos com qualquer outro equipamento que possua infravermelho (IRDA). Bluetooth: um padro global de comunicao sem o e de baixo consumo de energia que permite a transmisso de dados entre dispositivos compatveis com a tecnologia. Para isso, uma combinao de hardware e software utilizada para permitir que essa comunicao ocorra entre os mais diferentes tipos de aparelhos. A transmisso de dados feita atravs de radiofreqncia, permitindo que um dispositivo detecte o outro independente de suas posies, desde que estejam dentro do limite de proximidade.
Para que seja possvel atender aos mais variados tipos de dispositivos, o alcance mximo do Bluetooth foi dividido em trs classes:
Classe 1: potncia mxima de 100 mW, alcance de at 100 metros; Classe 2: potncia mxima de 2,5 mW, alcance de at 10 metros; Classe 3: potncia mxima de 1 mW, alcance de at 1 metro.
A velocidade de transmisso de dados no Bluetooth baixa: at a verso 1.2, a taxa pode alcanar, no mximo, 1 Mbps. Na verso 2.0, esse valor passou para at 3 Mbps. Embora essas taxas sejam curtas, so su cientes para uma conexo satisfatria entre a maioria dos dispositivos. Existem vrios produtos ativados
8 Disco removvel de capacidade 100 MB, aproximadamente do tamanho de um disquete 3.5.
46
Evoluo e Arquitetura de Computadores
por Bluetooth, como celulares, impressoras, modems e fones de ouvido sem o. A tecnologia til quando necessria transferncia de informaes entre dois ou mais dispositivos que esto perto um do outro ou em outras situaes onde no necessria alta taxa de transferncia.
5.3 Cooler
Com o avano da tecnologia dos processadores, manter sua temperatura de funcionamento sob controle e dentro de certos limites tornou-se um fator crtico. Por isso, os dissipadores de calor ou coolers tornaram-se fundamentais para o perfeito funcionamento do computador e para a maior durabilidade da CPU. A principal funo do cooler evitar um super aquecimento e um possvel travamento da mquina. A Figura 5.10, mostra um tipo de cooler que utilizado no processo de resfriamento interno das CPUs.
Figura 5.10 - Cooler
5.4 - Placa Me
A placa-me, tambm denominada mainboard ou motherboard, uma placa de circuito impresso eletrnico que tem como funo permitir que o processador se comunique com todos os perifricos instalados.
Na placa-me encontramos no s o processador, mas tambm a memria RAM, os circuitos de apoio, as placas controladoras, os conectores de barramentos e os chipset, que so os principais circuitos integrados da placa-me e so responsveis pelas comunicaes entre o processador e os demais componentes. Veja na Figura 5.11, um modelo ilustrado de placame.
Figura 5.11 - Placa - Me (motherboard )
5.5 - Chipset
Chipset so circuitos de apoio ao processador que gerenciam praticamente todo o funcionamento da placa-me (controle de memria cache, DRAM, controle do bu er de dados, interface com a CPU). responsvel pelas informaes necessrias ao reconhecimento de hardware (armazenadas na sua memria ROM).
Evoluo e Arquitetura de Computadores
47
A arquitetura da placa-me depende do tipo de chipset presente nesta. Entender o seu funcionamento e a sua importncia, tornar melhor a compreenso do funcionamento do microcomputador. A grande maioria dos chipsets segue o projeto tradicional, onde as funes so divididas em dois chips, chamados de porte norte (north bridge) e ponte sul (south bridge) (ilustrados na Figura 5.12 e na Figura 5.13): Controlador de sistema (tambm chamada ponte norte) o chip mais complexo, que ca sicamente mais prximo do processador. Ele incorpora os barramentos rpidos e funes mais complexas, incluindo o controlador de memria, as linhas do barramento PCI Express, ou o barramento AGP, alm do chipset de vdeo onboard, quando presente. Controlador de perifricos (tambm chamada ponte sul) invariavelmente um chip menor e mais simples que o primeiro. Nas placas atuais ele incorpora os barramentos mais lentos, como o barramento PCI, portas USB, SATA e IDE, controladores de som e rede e tambm o controlador Super I/O, que agrupa portas de legado, como as portas seriais e paralelas, porta para o drive de disquete e portas do teclado e mouse (PS/2). importante notar que o controlador de perifricos no ir controlar perifricos integrados on board (eles tm controladores prprios).
Figura 5.12 Ponte norte de um chipset
Figura 5.13 Ponte sul de um chipset
A conexo entre a ponte norte e a ponte sul feita atravs de um barramento. No incio, o barramento utilizado para conectar a ponte norte ponte sul era o barramento PCI. Atualmente, o barramento PCI no mais usado para esse tipo de conexo e foi substitudo por um barramento dedicado.
48
Evoluo e Arquitetura de Computadores
5.6 - Fonte de Alimentao
Por se tratar de um dispositivo eltrico o computador precisa de eletricidade para que todos os seus componentes funcionem de forma adequada. O dispositivo responsvel por prover eletricidade ao computador a de fonte de alimentao. De forma bastante sucinta poderamos dizer que a principal funo da fonte de alimentao converter a tenso alternada fornecida pela rede eltrica presente na tomada de sua casa ou escritrio (tambm chamada CA ou AC) em tenso contnua (tambm chamada CC ou DC). Em outras palavras, a fonte de alimentao converte os 110 V ou 220 V alternados da rede eltrica convencional para as tenses contnuas utilizadas pelos componentes eletrnicos do computador, que so: +3,3 V, +5 V, +12 V e -12 V (tenses alternadas variam pelo mundo e mesmo no Brasil variam de cidade a cidade. A fonte de alimentao (Veja Figura 5.14) talvez seja o componente mais negligenciado do computador. Normalmente na hora de comprar um computador, s levamos em considerao o clock do processador, o modelo da placa-me, o modelo da placa de vdeo, a quantidade de memria instalada, a capacidade de armazenamento do disco rgido, e esquecemo-nos da fonte de alimentao, que na verdade quem fornece o combustvel para que as peas de um computador funcionem corretamente A maioria das fontes de alimentao tem uma chave 110 V/220 V ou ento pode ser do tipo automtica, bivolt ou auto range, o que signi ca que a fonte pode funcionar em qualquer tenso CA (normalmente entre 100 V e 240 V; a faixa de operao suportada est impressa na etiqueta da fonte de alimentao em um campo chamado AC Input ou Entrada CA. Uma fonte de alimentao de boa qualidade e com capacidade su ciente pode aumentar a vida til do seu equipamento e reduzir sua conta de energia. Para se ter uma idia, uma fonte de alimentao de qualidade custa menos de 5% do preo total de um micro. J uma fonte de alimentao de baixa qualidade pode causar uma srie de problemas intermitentes, que na maioria das vezes so de difcil resoluo.
Uma fonte de alimentao defeituosa ou mal dimensionada pode fazer com que o computador trave, pode resultar no aparecimento de setores defeituosos (bad blocks) no disco rgido, pode resultar no aparecimento da famosa tela azul e resets aleatrios, alm de vrios outros problemas.
Existem vrios diferentes padres de fontes de alimentao para PCs. Esses padres de nem no apenas o tamanho fsico, mas tambm o tipo de conectores de uma fonte de alimentao. Os dois principais so: AT: Este padro foi introduzido pelo IBM PC AT em 1984 e foi usado at o padro ATX ganhar popularidade em meados dos anos 90. Fontes de alimentao AT fornecem quatro tenses, +5 V, +12 V, -5 V e -12 V, e o cabo principal da placa-me usa um conector de 12 pinos. ATX: em 1996 a Intel introduziu um novo formato de placa-me chamado ATX para substituir o antigo formato AT. Como a placa-me ATX tinha dimenses fsicas completamente diferentes, novos gabinete foram necessrios (gabinetes ATX, ao contrrio dos gabinetes AT usados at ento). Com este novo formato de placa-me a Intel tambm props um novo tipo de fonte de alimentao com novos recursos, tais como o uso de um conector da placa-me de 20 pinos e a introduo de novas tenses, +3,3 V e +5VSB, tambm conhecida como tenso de standby.
Evoluo e Arquitetura de Computadores
49
Figura 5.14 - Fonte Alimentao 450W
Um dos fatos que contriburam para que o padro AT deixasse de ser usado (e o ATX fosse criado), o espao interno reduzido, que com a instalao dos vrios cabos do computador (cabo at, alimentao), di cultavam a circulao de ar, acarretando, em alguns casos, danos permanentes mquina, devido ao super aquecimento. Isso exigia grande habilidade do tcnico montador para aproveitar o espao disponvel da melhor maneira. Alm disso, o conector de alimentao da fonte AT, que ligado placa-me, composto por dois plugs semelhantes (cada um com seis pinos), que devem ser encaixados lado a lado, sendo que os os de cor preta de cada um devem car localizados no meio. Caso esses conectores sejam invertidos e a fonte de alimentao seja ligada, a placa-me ser fatalmente queimada. Com o padro AT, necessrio desligar o computador pelo sistema operacional, aguardar um aviso de que o computador j pode ser desligado e clicar no boto Power presente na parte frontal do gabinete. Somente assim o equipamento desligado. Isso se deve a uma limitao das fontes AT, que no foram projetadas para fazer uso do recurso de desligamento automtico. Os conectores das fontes AT e ATX so mostrados na Figura 5.15. Repare que o nico que muda entre um padro e outro o conector que alimenta a placa-me. No caso do padro AT, esse conector possui 12 os. No padro ATX, esse conector possui 20 vias (h modelos com 24 vias). Alm disso, o encaixe do conector ATX diferente, pois seus orifcios possuem formatos distintos para impedir sua conexo de forma invertida. No padro AT, comum haver erros, pois o conector dividido em duas partes e pode-se coloc-los em ordem errada. A seqncia correta encaixar os conectores deixando os os pretos voltados ao centro.
Figura 5.15 - Conector da Fonte ATX e Conector da fonte AT, respectivamente
50
Evoluo e Arquitetura de Computadores
6.
SISTEMAS NUMRICOS
Sistemas de numerao so formas de representao de valores. Existem os sistemas no-posicionais e os posicionais. Nos no-posicionais o smbolo no depende da posio. Por exemplo, os numerais romanos: o smbolo X vale 10 em qualquer posio que estiver no nmero, seja IX ou LXV. J nos posicionais, o valor do smbolo muda com a posio. Por exemplo: o smbolo 6 dentro do nmero 625 signi ca o valor 600, mas no nmero 461 signi ca 60. Diariamente trabalhamos com o sistema posicional decimal, assim chamado por ter dez smbolos: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9. Como tem dez smbolos, dizemos tambm que possui base 10. O computador funciona em binrio, ou seja, representa os nmeros somente com os smbolos 0 e 1. Este um sistema de numerao com base 2 ou binrio. Na eletrnica ainda comum trabalhar-se com o sistema octal, que possui base 8, cujos smbolos so: 0, 1, 2, 3, 4, 5, 6, 7. Para o endereamento da memria do computador utilizado o sistema de numerao hexadecimal, de base 16, formado pelos smbolos: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F. So estes quatro sistemas de numerao que sero o fundamento do estudo da computao, sendo necessrios para compreenso da organizao de sua arquitetura. Para compreendermos melhor a relao entre eles, devemos estudar a converso de uma base para outra.
6.1 - Sistema numrico decimal
A designao de decimal para este sistema numrico advm do uso de dez algarismos 0, 1, 2, 3, 4, 5, 6, 7, 8, 9. A posio de cada um destes algarismos dentro do nmero est associada um determinado valor. Assim, caminhando da direita para a esquerda, o algarismo mais direita, deve ser multiplicado por 1, o algarismo situado imediatamente esquerda deste, multiplicado por 10, o que vem a seguir por 100, etc. Exemplo mostrado na Expresso 6.1.
Expresso 6.1 Sistema numrico decimal
6.2 - Sistema numrico binrio
O sistema numrico binrio difere em vrios aspectos do sistema decimal que o que ns utilizamos na vida diria. Este sistema numrico de base igual a 2 e s contm dois algarismos, que so 1 e 0, que correspondem aos sinais eltricos ligado e desligado. O computador trabalha com essa base de numerao binria. Essa deciso de projeto deve-se maior facilidade de representao interna no computador, que obtida atravs de dois diferentes nveis de tenso. No sistema binrio os dados so representados por : Bit (1 digito binrio) ou Binary Digit: valor 0 ou 1
Evoluo e Arquitetura de Computadores
51
Byte = 8 bits Palavra (word), conforme a arquitetura ocupar n bytes. Caracter: conjunto de n bits que de ne 2n caracteres Exemplo: 10011011 um nmero binrio com 8 dgitos Para converter um nmero binrio em decimal, ou seja extrair um valor numrico decimal de uma srie de zeros e uns, basta seguir o exemplo abaixo. Exemplo mostrado na Expresso 6.2
Expresso 6.2 converso binrio para decimal
O maior valor decimal, que pode ser representado por um determinado nmero de smbolos binrios, coincide com 2 elevado a um expoente igual ao nmero de smbolos binrios utilizados, subtrado de uma unidade: 24 -1 = 16- 1= 15. Isto signi ca que possvel representar os nmeros decimais de 0 a 15, apenas com 4 algarismos binrios (incluem-se portanto os nmeros 0 e 15), ou seja, 16 valores diferentes. As operaes que se executam no sistema decimal, tambm podem ser executadas no sistema binrio. Um over ow acontece sempre que o resultado de uma operao no puder ser armazenado no nmero de bits disponveis.
62.1 - Representao de Nmeros Inteiros
Existe diversas formas para representar um nmero inteiro no computador. Uma delas atravs do sinal-magnitude. Em uma palavra de n bits, os n-1 bits mais direita representam a magnitude do nmero inteiro, como mostrado na Expresso 6.3
Expresso 6.3 Regras para adio em binrio
As desvantagens apresentadas pela representao de sinal-magnitude so:
Duas representaes para 0:
+010 = 00000000 -010 = 10000000 (sinal-magnitude)
Para efetuar operaes de adio e subtrao preciso considerar tanto a magnitude quanto o sinal dos operandos;
52
Evoluo e Arquitetura de Computadores
Em conseqncia, o esquema mais utilizado a representao em complemento de dois que assim como a representao sinal-magnitude, a representao em complemento de dois usa o bit mais signi cativo como bit de sinal, porm, os demais bits so interpretados de maneira diferente. A Tabela 6.1 relaciona as caractersticas-chave da representao e da aritmtica em complemento de dois.
Tabela 6.1 Caractersticas da representao e aritmtica em complemento de dois
Faixa de valores representveis
-2n-1 a 2n-1 -1
Nmero de representaes para o zero
1 Acrescente posies de bit esquerda e preencha esses bits com o valor do bit de sinal original Se dois nmeros com mesmo sinal (ambos positivos ou ambos negativos) forem somados, ocorrer over ow apenas se o resultado tiver sinal oposto Para subtrair B de A, pegue o complemento de dois de B e some-o com A
Expanso do nmero de bits
Regra de over ow
Regra de subtrao
Vejamos a aplicao do complemento de dois no inteiro positivo 4 (01002) na Expresso 6.4:
Expresso 6.4 Complemento de dois do nmero 01002
Vejamos a representao vetorial do complemento de dois na Expresso 6.5 e na Expresso 6.6.
Expresso 6.5 Converso do valor binrio 100000011 para um valor em decimal
Evoluo e Arquitetura de Computadores
53
Expresso 6.6 Converso do valor decimal -120 para seu valor binrio
Vejamos a converso entre representao de um nmero inteiro com n bits para sua representao com m bits, onde m > n:
Notao sinal-magnitude:
+10 = 00001010 (8 bits) -10 = 10001010 (8 bits)
0000000000001010 (16 bits) 1000000000001010 (16 bits)
Notao complemento de dois:
+10 = 00001010 (8 bits) -10 = 11110110 (8 bits)
0000000000001010 (16 bits) 1111111111110110 (16 bits)
6.2.2 - Negao em complemento de dois
Na regra para a negao, basta aplicar o complemento de 2 ao inteiro original, como exempli cado na Tabela 6.4. H casos especiais para a negao em complemento de dois:
Se o nmero for 0, para uma representao em 8 bits, o bit vai um (carry-in) com o valor obtido na posio mais a esquerda ignorado, como pode ser visualizado na Expresso 6.7. Se negarmos o padro de bits constitudo de um bit com valor 1 seguido de n-1 bits de valor 0, obteremos esse mesmo nmero. Como exemplo, para uma palavra de 8 bits, ilustrado Expresso 6.8.
Expresso 6.7 Complemento de dois de 0
54
Evoluo e Arquitetura de Computadores
Expresso 6.8 Complemento de dois de -128
Caso especial: sempre que o nmero com sinal tiver um 1 no bit de sinal e zero em todos os outros bits, seu equivalente decimal ser -2n sendo n nmero magnitude, como mostrado no exemplo abaixo: 1000 = -23 = - 8 10000 = -24 = - 16 6.2.3 - Adio em binrio
As regras bsicas para a adio em binrio so mostradas na Expresso 6.9:
01000 = + 8 010000 = + 16.
Expresso 6.9 Regras para adio em binrio
Para executar a adio em complemento de dois, basta somar e quando ocorrer um vai-um para fora do bit mais signi cativo da palavra, que ignorado. Exemplo mostrado na Expresso 6.10 e na Expresso 6.11
Expresso 6.10 Adio em binrio
Expresso 6.11 Soma em binrio com over ow
Evoluo e Arquitetura de Computadores
55
6.2.4 - Subtrao em binrio
A subtrao, tal como a adio, obedece ao mesmo princpio. O resultado de subtrairmos dois zeros ou dois uns, zero. Se quisermos subtrair 1 a 0, temos que pedir emprestado 1 ao dgito binrio imediatamente esquerda no nmero. Exemplo mostrado na Expresso 6.12.
Expresso 6.12 Subtrao em binrio
Para subtrair S de M, em complemento de dois, pegue o complemento de dois de M e acrescente esse valor a S. Veja os exemplos ilustrados na Expresso 6.13 e na Expresso 6.14.
Expresso 6.13 Subtrao em complemento de dois
Expresso 6.14 Subtrao em complemento de dois com over ow
6.2.5 - Multiplicao em binrio
A multiplicao binria de nmeros inteiros sem sinal segue os mesmos princpios gerais da multiplicao decimal. Entretanto, com apenas dois possveis bits multiplicadores (1 ou 0), multiplicao binria um processo muito mais simples: 0 x 0 = 0 0x1=0 1x0=0 1x1=1 Como exemplo, vamos multiplicar 10012 (9d) por 11002 (12d) cujo produto resulta em 1101100 (108d), ilustrado na Expresso 6.15.
56
Evoluo e Arquitetura de Computadores
Expresso 6.15 Multiplicao de nmeros inteiros binrio sem sinal
Infelizmente, o esquema anterior no funciona para multiplicao com sinal, veja nos exemplos abaixo:
Existem diversas solues possveis para esse e outros dilemas gerados na multiplicao com sinal. Um dos algoritmos mais usados o de Booth. Usando-se o algoritmo de Booth, gera-se um produto parcial para cada bit no multiplicador. Se o valor do bit do multiplicador 0, seu produto parcial correspondente consiste apenas de zeros, se o valor do bit 1, seu produto parcial correspondente uma cpia do multiplicando. Adicionalmente, cada produto parcial deslocado esquerda um nmero de bits que funo do bit do multiplicador com o qual est associado; por exemplo, o produto parcial associado com o bit 0 no multiplicador deslocado a esquerda zero bits, o produto parcial associado com o bit 1 deslocado a esquerda de um bit, e assim por diante. Todos os produtos parciais so ento somados para gerar o resultado, cujo nmero de bits a soma do nmero de bits dos dois valores que esto sendo multiplicados (veja Expresso 6.13).
Expresso 6.16 Multiplicao de nmeros binrios utilizando o algoritmo de Booth
Infelizmente, o algoritmo de Booth funciona apenas com nmeros binrios sem bit de sinal. Entretanto, esse problema pode ser resolvido tomando-se o complemento de dois de qualquer nmero negativo antes de
Evoluo e Arquitetura de Computadores
57
coloc-lo no multiplicador. Se os sinais dos dois valores forem os mesmos, ambos positivos ou ambos negativos, ento no necessrio efetuar nenhuma outra ao, porm, se os sinais so diferentes, ento o resultado retornado pelo multiplicador precisa ser negado efetuando-se seu complemento de dois.
6.2.6 - Diviso em binrio
Como nas demais operaes aritmticas, a diviso binria efetuada de modo semelhante diviso decimal, considerando-se apenas que: 0/1=0 1/1=1 e que a diviso por zero acarreta erro. O algoritmo a seguir apresentado, utilizado para executar a diviso em binrio: 1- a partir da esquerda, avanam-se tantos algarismos quantos necessrios para obter-se um valor igual ou maior que o divisor; encontrado esse valor, registra-se 1 para o quociente; 2- subtrai-se do valor obtido no dividendo o valor do divisor (na diviso, como o quociente somente pode ser de valor igual a 1, a subtrao sempre com o prprio valor do divisor); 3- ao resultado acrescentam-se mais algarismos do dividendo (se ainda houver algum), at obter-se um valor igual ou maior que o divisor (como no item 1). Se o(s) algarismo(s) for(em) zero, acrescenta-se zero(s) ao quociente; repete-se o processo a partir do item 1, at que se esgotem os algarismos do dividendo (Veja exemplo os exemplos abaixo).
Dividir 11011 e 101.
Dividir 11011 e 101.
58
Evoluo e Arquitetura de Computadores
6.3 - Sistema numrico hexadecimal
O sistema numrico hexadecimal tem base igual a 16. Se a base 16, vamos precisar de 16 smbolos diferentes para algarismos. No sistema hexadecimal, os algarismos so: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F. As letras A, B, C, D, E e F correspondem respectivamente aos decimais 10, 11, 12, 13, 14 e 15. Foram escolhidos esses smbolos, a m de tornar a escrita dos nmeros mais fcil. Tal como para o caso do sistema binrio, tambm aqui, ns podemos determinar, atravs da mesma frmula, qual o maior nmero decimal que possvel representar com um determinado nmero de algarismos hexadecimais. Geralmente, os nmeros hexadecimais so escritos com um pre xo $ ou 0x, ou com o su xo h, para realar o sistema numrico que estamos a utilizar. Assim, o nmero hexadecimal A37E, pode ainda ser mais corretamente escrito como $A37E, 0xA37E ou A37Eh. Para traduzirmos um nmero hexadecimal para o sistema numrico binrio, no necessrio executar qualquer clculo mas, simplesmente, substituir cada algarismo do nmero pelos dgitos binrios que o representam. Como o valor mximo representado por um algarismo no sistema hexadecimal 15, isso signi ca que so precisos 4 dgitos binrios, para cada algarismo hexadecimal. Exemplo mostrado na Expresso 6.17.
Expresso 6.17 Converso de hexadecimal para binrio
Se convertermos ambos os membros da identidade para o sistema numrico decimal, obtemos, em ambos os casos, o nmero decimal 228, o que comprova que no nos enganamos. Para obter o equivalente decimal a um nmero hexadecimal, precisamos multiplicar cada algarismo do nmero, por uma potncia de 16, cujo expoente, deve corresponder posio desse algarismo, no nmero hexadecimal. Em seguida, deve-se adicionar todos os resultados obtidos. Exemplo mostrado na Expresso 6.18
Expresso 6.18 converso de hexadecimal para decimal
A adio, tambm executada, tal como nos dois exemplos precedentes. Exemplo mostrado na Expresso 6.19.
Expresso 6.19 Adio em hexadecimal
Quando adicionamos dois algarismos hexadecimais, se a respectiva soma for igual a 16, escrevemos 0 na posio respectiva e adicionamos uma unidade soma dos dois algarismos que se seguem. Quer dizer, se a soma dos dois algarismos for, por exemplo, 19 (19 = 16 +3) escrevemos 3 nessa posio e, transferimos o 1 para o algarismo imediatamente a seguir. Se veri carmos, a primeira parcela o nmero 14891 e a segunda parcela da soma 43457. A soma das duas parcelas 58348, que coincide com o equivalente decimal do
Evoluo e Arquitetura de Computadores
59
nmero hexadecimal $E3EC. A subtrao, tambm segue um processo idntico ao dos dois outros sistemas. Se o algarismo do subtraendo for menor que o do subtrator, necessrio decrementar em uma unidade, o algarismo seguinte no subtraendo. Um exemplo de subtrao em hexa mostrado na Expresso 6.20.
Expresso 6.20- Subtrao em hexa
Analisando o resultado, veri camos que o subtraendo e o subtrator, correspondem, respectivamente, aos decimais 11590 e 5970, a diferena 5620, que o nmero que obtemos se zermos a converso de $15F4, para o sistema numrico decimal.
6.4 - Converso de bases 6.4.1 - Decimal-binrio
A converso consiste em dividir o nmero representado na base 10 sucessivamente pela nova base em que se deseja represent-lo, at que o quociente da diviso seja menor que a base em questo. Em seguida toma-se o ltimo quociente e os restos das sucessivas divises em ordem inversa e obtm-se, assim, a representao do nmero na nova base. Exemplo mostrado na Expresso 6.21: converter 2710 para a base 2.
Expresso 6.21 - Converso decimal-binrio
Portanto 2710 = 110112
6.4.2 - Hexadecimal Binrio
Na converso HEX-BIN, convertemos cada digito Hexadecimal separadamente em quatro dgitos, fazendo uso da tabela Hexadecimal (Tabela 6.2) .
Tabela 6.2 Converso hexa-binrio
F 1111
6.4.3 - Binrio - Hexadecimal
6 0110
A 1010
9 1001
Para a converso de binrio em hexadecimal faremos o processo inverso ao Hexadecimal - Binrio. Se o nmero Binrio no for divisvel por 4, adicionamos os zeros necessrios esquerda.
60
Evoluo e Arquitetura de Computadores
Exemplo (Tabela 6.3): converter: 11011010100112 em hexa
Tabela 6.3 Converso binrio-hexa
0001 1
Resultado: 1B53h
1011 B
0101 5
0011 3
6.4.4 - Qualquer base para a decimal
Generalizando, para a converso de um nmero em uma base qualquer para a base decimal usa-se a seguinte frmula: N=dn-1 x bn-1 + dn-2 x bn-2 + ... + d1 x b1 + d0 x b0 Onde:
d: Indica cada algarismo do nmero n-1, n-2, 1,0: Indicam a posio de cada algarismo b: Indica a base de numerao n: Indica o nmero de dgitos inteiros
6.4.5 - Decimal - Hexadecimal
Para converter decimal em hexadecimal : 1) Divida o nmero pela base, o resto o primeiro dgito, da *direita* para a *esquerda* 2) O resultado da diviso anterior voc divide novamente e adiciona o dgito *esquerda* do dgito anterior 3) Repita esse processo at a diviso for igual a zero (o dividendo menor que a base) Lembrando que na base 16, os dgitos vo de 0 a 15, sendo os dgitos de ordem 10 a 15 representados pelas letras A a F, respectivamente. Exemplo: 66610 = 29A16, pois: 666 / 16 = 41, resto 10 (A) 1. 2. 41 / 16 = 2, resto 9 2 / 16 = 0, resto 2 (o prprio divisor)
A Tabela 6.4 apresenta os nmeros em decimal e sua representao correspondente em binrio, octal e hexadecimal
Evoluo e Arquitetura de Computadores
61
Tabela 6.4 Nmeros em decimal, binrio, octal e hexadecimal
Você também pode gostar
- Curso Linguagem C Para Microcontroladores PicNo EverandCurso Linguagem C Para Microcontroladores PicNota: 3 de 5 estrelas3/5 (2)
- Apostila Sobre Sistemas Operacionais:No EverandApostila Sobre Sistemas Operacionais:Ainda não há avaliações
- Criando Redes Locais Com O Cisco Packet Tracer 5No EverandCriando Redes Locais Com O Cisco Packet Tracer 5Ainda não há avaliações
- Arquitetura de ComputadoresDocumento190 páginasArquitetura de Computadoresrg.freittas100% (11)
- Apostila Introdução À Comunicação De Dados E Redes De ComputadoresNo EverandApostila Introdução À Comunicação De Dados E Redes De ComputadoresAinda não há avaliações
- Arquitetura de Computadores IDocumento59 páginasArquitetura de Computadores IJoseph DonaldAinda não há avaliações
- Livro - A Computação Pessoal e o Sistema Operacional Linux - 0 4Documento262 páginasLivro - A Computação Pessoal e o Sistema Operacional Linux - 0 4scoob.junior100% (26)
- Curso de Redes Laercio VasconcelosDocumento127 páginasCurso de Redes Laercio VasconcelosMarcelo Espíndola de MeloAinda não há avaliações
- Virtualização (2ª edição): Tecnologia Central do DatacenterNo EverandVirtualização (2ª edição): Tecnologia Central do DatacenterAinda não há avaliações
- Fundamentos em Sistemas OperacionaisDocumento178 páginasFundamentos em Sistemas OperacionaisManoel Messias100% (3)
- Redes De Computadores DescomplicadasNo EverandRedes De Computadores DescomplicadasAinda não há avaliações
- QUESTÕES Arquitetura de ComputadoresDocumento25 páginasQUESTÕES Arquitetura de ComputadoresMarcioFariaFariaAinda não há avaliações
- Livro de RedesDocumento211 páginasLivro de RedesMaria Joao Valfreixo MarquesAinda não há avaliações
- Virtualização - Componente Central do DatacenterNo EverandVirtualização - Componente Central do DatacenterAinda não há avaliações
- Configurando switches e roteadores ciscoNo EverandConfigurando switches e roteadores ciscoAinda não há avaliações
- Organizacao e Arquitetura de ComputadoresDocumento116 páginasOrganizacao e Arquitetura de ComputadoresWesley NobregaAinda não há avaliações
- Desenvolvimento De Software Ii C# Programação Em CamadasNo EverandDesenvolvimento De Software Ii C# Programação Em CamadasAinda não há avaliações
- Historia Da ComputaçãoDocumento204 páginasHistoria Da ComputaçãoNiccola Torres100% (8)
- Arquitetura de ComputadoresDocumento144 páginasArquitetura de ComputadoresMarcos RochaAinda não há avaliações
- Dominando Sub-redes No Ipv4 E No Ipv6No EverandDominando Sub-redes No Ipv4 E No Ipv6Ainda não há avaliações
- LP Apostila Logica de ProgramacaoDocumento73 páginasLP Apostila Logica de ProgramacaoVanlaer100% (2)
- Organização e Arquitetura de ComputadoresDocumento162 páginasOrganização e Arquitetura de ComputadoresManoel Messias100% (2)
- Terminologia de Hardware, Software e RedesDocumento182 páginasTerminologia de Hardware, Software e RedesCado Nani DemetrechenAinda não há avaliações
- Qualidade Terminologia HardwareDocumento56 páginasQualidade Terminologia HardwareCado Nani Demetrechen100% (3)
- MD Laboratorio de Montagem Final PDFDocumento157 páginasMD Laboratorio de Montagem Final PDFLucas Almeida100% (1)
- Exercícios - Montagem e Manutenção de ComputadoresDocumento44 páginasExercícios - Montagem e Manutenção de ComputadoresNilda Lima100% (2)
- Desatando os nós da rede: 45 exercícios de redes de computadoresNo EverandDesatando os nós da rede: 45 exercícios de redes de computadoresAinda não há avaliações
- Programação Básica Com VisualgNo EverandProgramação Básica Com VisualgAinda não há avaliações
- Metodologia E Engenharia De Requisitos Para Projetos De Business IntelligenceNo EverandMetodologia E Engenharia De Requisitos Para Projetos De Business IntelligenceAinda não há avaliações
- Livro HardwareDocumento98 páginasLivro HardwareEdmilson Vieira100% (1)
- Hardware - Novas TecnologiasDocumento385 páginasHardware - Novas TecnologiasRenan Tavares da Silva100% (1)
- C# Introdução A Programação Orientada A ObjetosNo EverandC# Introdução A Programação Orientada A ObjetosAinda não há avaliações
- Redes de ComputadoresDocumento106 páginasRedes de Computadorespessoni83% (6)
- Introdução Às Redes Wan: Redes De Computadores De Longa DistânciaNo EverandIntrodução Às Redes Wan: Redes De Computadores De Longa DistânciaAinda não há avaliações
- Livro - Estrutura de DadosDocumento202 páginasLivro - Estrutura de DadosSamuel Silva100% (5)
- Arquitetura e Organização de ComputadoresDocumento240 páginasArquitetura e Organização de Computadoresphd208100% (3)
- TDD para Games: Desenvolvimento guiado a testes para jogos digitaisNo EverandTDD para Games: Desenvolvimento guiado a testes para jogos digitaisAinda não há avaliações
- Curso Pdv Passo A Passo Delphi Com FiredacNo EverandCurso Pdv Passo A Passo Delphi Com FiredacAinda não há avaliações
- Arquitetura de Computadores - WebDocumento100 páginasArquitetura de Computadores - WebAnderson Costa100% (2)
- Aplicação fuzzy x pid: técnicas de controle em ambientes simuladosNo EverandAplicação fuzzy x pid: técnicas de controle em ambientes simuladosAinda não há avaliações
- Introdução A Delphi Com Banco De Dados FirebirdNo EverandIntrodução A Delphi Com Banco De Dados FirebirdAinda não há avaliações
- Arquitetura Montagem Computadores FINAL BAIXA PDFDocumento374 páginasArquitetura Montagem Computadores FINAL BAIXA PDFEngEzequiel100% (2)
- Programação Visual em JavaDocumento114 páginasProgramação Visual em JavaElton Conz100% (23)
- Aula13 14 Triggers e Procedimentos ArmazenadosDocumento25 páginasAula13 14 Triggers e Procedimentos ArmazenadosLizianne Priscila SoutoAinda não há avaliações
- Psi - Mod - 5 - Estruturas de Dados CompostasDocumento45 páginasPsi - Mod - 5 - Estruturas de Dados CompostasProgramacaoPascalAinda não há avaliações
- Curso Eplan P8 2Documento6 páginasCurso Eplan P8 2Andrea SerranoAinda não há avaliações
- Apostila K19-Orientação A Objeto em Java PDFDocumento243 páginasApostila K19-Orientação A Objeto em Java PDFItalo Pereira GuimaraesAinda não há avaliações
- Bomba LógicaDocumento5 páginasBomba LógicaArtur BorgesAinda não há avaliações
- Aula 2 - Método Da BissecçãoDocumento4 páginasAula 2 - Método Da BissecçãoAllan Sousa SoaresAinda não há avaliações
- Lista1 OdtDocumento2 páginasLista1 Odtreal bas100% (1)
- Telegram e WPPDocumento23 páginasTelegram e WPPFelipe AmaralAinda não há avaliações
- Poo Aula03 Padroes Grasp UnifalDocumento62 páginasPoo Aula03 Padroes Grasp UnifalFrancisco J Nogueira0% (1)
- Recuperar Probox 530 Lite - Set STB Memory ErrorDocumento12 páginasRecuperar Probox 530 Lite - Set STB Memory ErrorHenrique Alcantara E SilvaAinda não há avaliações
- Atividade 10Documento29 páginasAtividade 10LuisAlmeida100% (1)
- Checklist Atual - ATUAL REVISÃO 05 - CL RADIO - AOD - AOD2Documento4 páginasChecklist Atual - ATUAL REVISÃO 05 - CL RADIO - AOD - AOD2Rodrigo TozziAinda não há avaliações
- Aulas 1 e 2 - Teoria Dos Grafos - 2014 PDFDocumento35 páginasAulas 1 e 2 - Teoria Dos Grafos - 2014 PDFVictor EduardoAinda não há avaliações
- Apostila JBoss 7Documento23 páginasApostila JBoss 7Sirbogart PimentelAinda não há avaliações
- Lista de Exercicios IADocumento3 páginasLista de Exercicios IARobson AguiarAinda não há avaliações
- Passo A Passo - SU10 V2Documento3 páginasPasso A Passo - SU10 V2Rafael RibAinda não há avaliações
- Estacio Modelagem de DadosDocumento4 páginasEstacio Modelagem de DadosHector NigroAinda não há avaliações
- Criando Uma VM Windows Server 2008 No Virtualbox - Parte 1 e 2Documento21 páginasCriando Uma VM Windows Server 2008 No Virtualbox - Parte 1 e 2Boanerges MoreiraAinda não há avaliações
- Dominando ProgressDocumento302 páginasDominando ProgressAriosto LealAinda não há avaliações
- Guia Do Usuario Linha Wellon VP BRDocumento71 páginasGuia Do Usuario Linha Wellon VP BRFábioAinda não há avaliações
- 8051 Teoria PDFDocumento97 páginas8051 Teoria PDFxtrao58Ainda não há avaliações
- Primeira Avaliacao de Aprendizagem - GabaritoDocumento3 páginasPrimeira Avaliacao de Aprendizagem - GabaritoOliver OliveiraAinda não há avaliações
- Apostila de Eletropneumática Com CLP - SENAIDocumento65 páginasApostila de Eletropneumática Com CLP - SENAIThaty Granger50% (2)
- Algoritmos e ProgramaçãoDocumento29 páginasAlgoritmos e ProgramaçãomarceloguerraAinda não há avaliações
- Configurando Servidor SSHDocumento2 páginasConfigurando Servidor SSHSilvioRodriguesAinda não há avaliações
- 2.a Aula CLP Ifsp SPDocumento20 páginas2.a Aula CLP Ifsp SPMakyfranciscoAinda não há avaliações
- SQL InjectionDocumento12 páginasSQL InjectionRegina JohnsonAinda não há avaliações
- Trabalho Sobre VPNDocumento15 páginasTrabalho Sobre VPNONADROJ100% (1)
- Utilizando Hints OracleDocumento7 páginasUtilizando Hints Oraclecarloscardoso79Ainda não há avaliações