Você também pode gostar
- Programando O Pic Usando O Flowcode Parte Vi - Baseado Na Versão 6 E Pic16fNo EverandProgramando O Pic Usando O Flowcode Parte Vi - Baseado Na Versão 6 E Pic16fAinda não há avaliações
- Diagramas de Roseta e Redes de ProjeaoDocumento18 páginasDiagramas de Roseta e Redes de ProjeaoEdson MarioAinda não há avaliações
- Projetos Com Arm Programado Em C No Cubeide Com Base No Modelo Stm32f103c8 Parte XxixNo EverandProjetos Com Arm Programado Em C No Cubeide Com Base No Modelo Stm32f103c8 Parte XxixAinda não há avaliações
- 00 - Apostila Centro de Usinagem Romi-18!02!2008Documento181 páginas00 - Apostila Centro de Usinagem Romi-18!02!2008Beto SilvaAinda não há avaliações
- Monitorando Através Do Visual Basic O 4 – 20 Ma Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual Basic O 4 – 20 Ma Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Umidade Do ArDocumento18 páginasUmidade Do ArWalber TorresAinda não há avaliações
- Monitorando Através Do Visual C# O 4 – 20 Ma Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual C# O 4 – 20 Ma Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Aula 01 - Ementas e Orientaes PDFDocumento4 páginasAula 01 - Ementas e Orientaes PDFdiegokawa 4Ainda não há avaliações
- Desenvolvimento De Projetos Iot Para Monitoramento De Sensores Programado Em Arduino No Stm32f103c8No EverandDesenvolvimento De Projetos Iot Para Monitoramento De Sensores Programado Em Arduino No Stm32f103c8Ainda não há avaliações
- Distribuição de campo elétrico em capacitor de placas paralelasDocumento12 páginasDistribuição de campo elétrico em capacitor de placas paralelasFelipe LucenaAinda não há avaliações
- Exame Geog A (719 - Época Especial) - (2016)Documento14 páginasExame Geog A (719 - Época Especial) - (2016)Rui M. C. PimentaAinda não há avaliações
- Aula 11.03Documento2 páginasAula 11.03juliozanardi12Ainda não há avaliações
- Graficos Termopluviometricos Ficha de TrabalhoDocumento1 páginaGraficos Termopluviometricos Ficha de TrabalhoSaraAinda não há avaliações
- 4a Aula - Simulação de Monte Carlo 13 Julho 2021Documento30 páginas4a Aula - Simulação de Monte Carlo 13 Julho 2021Henrique LohanAinda não há avaliações
- Atv de Resmat2 - Saniel e LucianoDocumento4 páginasAtv de Resmat2 - Saniel e LucianoLuciano SilvaAinda não há avaliações
- Processamento de Sinais: Exercícios de Transformada de FourierDocumento9 páginasProcessamento de Sinais: Exercícios de Transformada de FourierFabio coutoAinda não há avaliações
- PS Exercícios1Documento2 páginasPS Exercícios1Fabio coutoAinda não há avaliações
- 5 Classificacao Dos SolosDocumento27 páginas5 Classificacao Dos Solosjr_ifbaAinda não há avaliações
- Gráfico GeografiaDocumento3 páginasGráfico GeografiaVascoAinda não há avaliações
- Ângulo de condução crítico retificadorDocumento1 páginaÂngulo de condução crítico retificadorAsel NrmoAinda não há avaliações
- Audiogram A4Documento1 páginaAudiogram A4yerniAinda não há avaliações
- Hyper SilDocumento1 páginaHyper SilCleber Pereira NunesAinda não há avaliações
- SeparadoresDocumento12 páginasSeparadoresadilson.diasAinda não há avaliações
- Calculo de viga biapoiada com carga uniformeDocumento9 páginasCalculo de viga biapoiada com carga uniformeNathalia CerqueiraAinda não há avaliações
- Arquivo 2Documento43 páginasArquivo 2Giuu AltranAinda não há avaliações
- Tarefa 2 - LaboratórioDocumento6 páginasTarefa 2 - LaboratórioAlexia ResplandesAinda não há avaliações
- SP280104 - SPIDEX-ALU-A28-PREB.7 (Alterado para B17)Documento1 páginaSP280104 - SPIDEX-ALU-A28-PREB.7 (Alterado para B17)InácioAinda não há avaliações
- Estatistica Atividade 2 EntregaDocumento4 páginasEstatistica Atividade 2 EntregaAriel VitorAinda não há avaliações
- Calculo Do Coeficiente de RendimentoDocumento3 páginasCalculo Do Coeficiente de RendimentojklsaddjlassadajkdlajlAinda não há avaliações
- Anotações EscolaDocumento23 páginasAnotações Escolarodrigo carnevali de oliveiraAinda não há avaliações
- Nova Bandeja T-CrossDocumento1 páginaNova Bandeja T-CrossHenrique ArdigoAinda não há avaliações
- Medidas de Posição 2Documento29 páginasMedidas de Posição 2danielli.brumAinda não há avaliações
- Representando funções no plano cartesianoDocumento34 páginasRepresentando funções no plano cartesianomaahyaAinda não há avaliações
- Estatística Da Prova Teste InicialDocumento2 páginasEstatística Da Prova Teste InicialBruno PsAinda não há avaliações
- Flicker e suas origensDocumento14 páginasFlicker e suas origensJose Carlos ProdocciniAinda não há avaliações
- Sutafer - ParafusosDocumento26 páginasSutafer - ParafusosFelipe BianchiAinda não há avaliações
- Centur 828 2020 WMDocumento102 páginasCentur 828 2020 WMElizeu SantosAinda não há avaliações
- Manual Sistema FusoDocumento31 páginasManual Sistema FusoYander Luis Hernández ArmasAinda não há avaliações
- Ficha SamDocumento4 páginasFicha SamIgorWAinda não há avaliações
- Aula 10 - Introdução Às DerivadasDocumento30 páginasAula 10 - Introdução Às DerivadasjoaosantiagodemirandaAinda não há avaliações
- Ficha Do Ensaio de Compactação - LimpaDocumento2 páginasFicha Do Ensaio de Compactação - LimpaTárcio OliveiraAinda não há avaliações
- Exercício 2Documento4 páginasExercício 2Coordenação Geral FMPFMAinda não há avaliações
- Kizaru, um lutador de operações especiais com habilidades mortaisDocumento2 páginasKizaru, um lutador de operações especiais com habilidades mortaisJOABE DIASAinda não há avaliações
- Elli Eel1an MCB3Documento14 páginasElli Eel1an MCB3Otávio Cecon ComelliAinda não há avaliações
- Laje armada e pré-esforço em estrutura de betãoDocumento3 páginasLaje armada e pré-esforço em estrutura de betãoSérgyo AllexAinda não há avaliações
- Função de ProduçãoDocumento18 páginasFunção de ProduçãoLiliane Lima BarrosAinda não há avaliações
- UlbraginDocumento40 páginasUlbraginsiriannibrAinda não há avaliações
- Análise de solo para agriculturaDocumento35 páginasAnálise de solo para agriculturaRodrigo BarrosAinda não há avaliações
- Certificado 6160 - COOPERHAF - CISALHAMENTO DIRETO AMOSTRA INDEFORMADA NATURALDocumento2 páginasCertificado 6160 - COOPERHAF - CISALHAMENTO DIRETO AMOSTRA INDEFORMADA NATURALLucas GasperinAinda não há avaliações
- Cavaleiro do FerrãoDocumento2 páginasCavaleiro do FerrãoOctopuzAinda não há avaliações
- Abaco Utilizacao PDFDocumento15 páginasAbaco Utilizacao PDFMario Alberto Molina PandiaAinda não há avaliações
- Composição Areia NovaDocumento11 páginasComposição Areia NovaKim SaxAinda não há avaliações
- Casae - KTS - 1sem - 2022Documento4 páginasCasae - KTS - 1sem - 2022César De SantanaAinda não há avaliações
- Bomba Apex28 - 35-brpt-04Documento2 páginasBomba Apex28 - 35-brpt-04antonioAinda não há avaliações
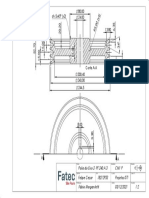
- Projeto de polia para eixo 2 com dimensões principaisDocumento1 páginaProjeto de polia para eixo 2 com dimensões principaisFELIPEAinda não há avaliações
- ELETRONICADocumento25 páginasELETRONICAHenrique LopesAinda não há avaliações
- Conjunto VirabrequimDocumento1 páginaConjunto VirabrequimDavi LucioAinda não há avaliações
- CotaçãoDocumento1 páginaCotaçãoWesllen DiasAinda não há avaliações
- Folha de Dados Eee03Documento2 páginasFolha de Dados Eee03engenhariaAinda não há avaliações