Você também pode gostar
- NAPRX01 simuladoresSCPWS1Documento7 páginasNAPRX01 simuladoresSCPWS1pauloricpndAinda não há avaliações
- Projetos Com Arm Programado Em C No Cubeide Com Base No Modelo Stm32f103c8 Parte ViiNo EverandProjetos Com Arm Programado Em C No Cubeide Com Base No Modelo Stm32f103c8 Parte ViiAinda não há avaliações
- Desenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Odômetro Com PicNo EverandDesenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Odômetro Com PicAinda não há avaliações
- CLPDocumento5 páginasCLPbetoAinda não há avaliações
- Desenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Dinamômetro Com PicNo EverandDesenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Dinamômetro Com PicAinda não há avaliações
- Desenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Barômetro Com PicNo EverandDesenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Barômetro Com PicAinda não há avaliações
- Roteiro de Utilização de Controlador PID Utilizando CLP Micrologix 1200Documento13 páginasRoteiro de Utilização de Controlador PID Utilizando CLP Micrologix 1200Emerson RuizAinda não há avaliações
- Manual Sim LadderDocumento23 páginasManual Sim LadderCarlos Diego S. Estevão100% (1)
- Introducao Robotica V5 09jan2022Documento19 páginasIntroducao Robotica V5 09jan2022MauricioAinda não há avaliações
- LE3U - PLC - Analog - and - PID 2Documento3 páginasLE3U - PLC - Analog - and - PID 2rogerio francisco silvaAinda não há avaliações
- O Controle PIDDocumento2 páginasO Controle PIDPABLIO RODRIGUESAinda não há avaliações
- Implementando Um Controle Pid Com O Arduino E Visual C#No EverandImplementando Um Controle Pid Com O Arduino E Visual C#Ainda não há avaliações
- Apresentando No Display Tm1638 A Medição De Dinamômetro Programado No ArduinoNo EverandApresentando No Display Tm1638 A Medição De Dinamômetro Programado No ArduinoAinda não há avaliações
- Programando O Pic Usando O Flowcode Parte Ii - Baseado Na Versão 6 E Pic16f887No EverandProgramando O Pic Usando O Flowcode Parte Ii - Baseado Na Versão 6 E Pic16f887Ainda não há avaliações
- Modulo4 Aula1 CLPDocumento21 páginasModulo4 Aula1 CLPJose Roberto Rodrigues PereiraAinda não há avaliações
- Introdução Ao Controlador Lógico Programado (CLP)Documento66 páginasIntrodução Ao Controlador Lógico Programado (CLP)Franklin TertulianoAinda não há avaliações
- Iot Aplicado A Avicultura Com Pic E Módulo Wifi Esp8266No EverandIot Aplicado A Avicultura Com Pic E Módulo Wifi Esp8266Ainda não há avaliações
- Pid Digital EmbarcadosDocumento44 páginasPid Digital EmbarcadosThiago WerneckAinda não há avaliações
- Enviando A Concentração De Amônia Para Uma Conta Do Twitter Com A Raspberry Pi Programada Em PythonNo EverandEnviando A Concentração De Amônia Para Uma Conta Do Twitter Com A Raspberry Pi Programada Em PythonAinda não há avaliações
- Conectando Um Teclado Matricial Programado No ArduinoNo EverandConectando Um Teclado Matricial Programado No ArduinoAinda não há avaliações
- Implementando Um Controle Pid Com O Arduino E Visual BasicNo EverandImplementando Um Controle Pid Com O Arduino E Visual BasicAinda não há avaliações
- Curso CLP - Siemens - PraticaDocumento61 páginasCurso CLP - Siemens - PraticaLeonardo Costa100% (1)
- Projetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte LxiiiNo EverandProjetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte LxiiiAinda não há avaliações
- Iot Aplicado A Manufatura Com Pic E Módulo Wifi Esp8266No EverandIot Aplicado A Manufatura Com Pic E Módulo Wifi Esp8266Ainda não há avaliações
- Apresentando No Display Tm1638 A Medição De Glp Programado No ArduinoNo EverandApresentando No Display Tm1638 A Medição De Glp Programado No ArduinoAinda não há avaliações
- Enviando A Medição Do Dinamômetro Para Uma Conta Do Twitter Com A Raspberry Pi Programada Em PythonNo EverandEnviando A Medição Do Dinamômetro Para Uma Conta Do Twitter Com A Raspberry Pi Programada Em PythonAinda não há avaliações
- PID-ToolBox - Uma Ferramenta para o Ensino e Ajuste de Controladores PIDsDocumento22 páginasPID-ToolBox - Uma Ferramenta para o Ensino e Ajuste de Controladores PIDsRicael SpirandeliAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medir Odômetro Com PicNo EverandDesenvolvendo Um Datalogger Para Medir Odômetro Com PicAinda não há avaliações
- Iot Aplicado A Piscicultura Com Pic E Módulo Wifi Esp8266No EverandIot Aplicado A Piscicultura Com Pic E Módulo Wifi Esp8266Ainda não há avaliações
- Implementando Um Conversor Rpm->tensão Com Base No Xc8 E Pic18f2520No EverandImplementando Um Conversor Rpm->tensão Com Base No Xc8 E Pic18f2520Ainda não há avaliações
- Desenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Fluxo De Massa Com PicNo EverandDesenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Fluxo De Massa Com PicAinda não há avaliações
- Lendo Um Encoder Para Controle De Velocidade De Motor Dc Com Base No ArduinoNo EverandLendo Um Encoder Para Controle De Velocidade De Motor Dc Com Base No ArduinoAinda não há avaliações
- Enviando A Medição De Um Dinamômetro Para Uma Conta Do Twitter Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandEnviando A Medição De Um Dinamômetro Para Uma Conta Do Twitter Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Artigo EPD2Documento12 páginasArtigo EPD2pauloagarayAinda não há avaliações
- Folder Garay EngenhariaDocumento2 páginasFolder Garay EngenhariapauloagarayAinda não há avaliações
- Análise de Investimento: IndíceDocumento45 páginasAnálise de Investimento: IndícepauloagarayAinda não há avaliações
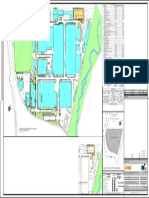
- AQsthFER - DE.00001.R07.implGENERAL PLANDocumento1 páginaAQsthFER - DE.00001.R07.implGENERAL PLANpauloagarayAinda não há avaliações
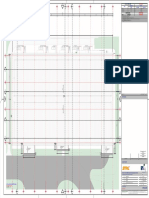
- AQsthFER - DE.52003.R00.toolROOF PLANDocumento1 páginaAQsthFER - DE.52003.R00.toolROOF PLANpauloagarayAinda não há avaliações
- ST-0001 - HOSPITAL CENTENARIO-INSPEÇÃO DO GRUPO GERADOR 04de12Documento23 páginasST-0001 - HOSPITAL CENTENARIO-INSPEÇÃO DO GRUPO GERADOR 04de12pauloagarayAinda não há avaliações
- Modelo Artigo AcidentesDocumento12 páginasModelo Artigo AcidentespauloagarayAinda não há avaliações
- Questionario para Os TrabalhadoresDocumento1 páginaQuestionario para Os TrabalhadorespauloagarayAinda não há avaliações
- TPM4 - Trabalho Prático Do Módulo 4 - 2023-1A - Bootcamp - Gerente de ProjetosDocumento5 páginasTPM4 - Trabalho Prático Do Módulo 4 - 2023-1A - Bootcamp - Gerente de ProjetosL Fonseca100% (1)
- Filippetti CCNA 4 1 Guia Completo PDFDocumento478 páginasFilippetti CCNA 4 1 Guia Completo PDFLuiz Felipe e Silva Machado91% (11)
- Ibfc 2022 Camara de Franca SP Motorista ProvaDocumento6 páginasIbfc 2022 Camara de Franca SP Motorista ProvaFelipe VasconcelosAinda não há avaliações
- CNCProteo Mini Manual PLC PDFDocumento113 páginasCNCProteo Mini Manual PLC PDFEverton NascimentoAinda não há avaliações
- Enter6 Tic Planificacao AnualDocumento2 páginasEnter6 Tic Planificacao AnualNelson SilvaAinda não há avaliações
- Manual Dell Latitude 5480Documento105 páginasManual Dell Latitude 5480Caio BaptistaAinda não há avaliações
- Metasploit Framework (Artigo)Documento17 páginasMetasploit Framework (Artigo)Vinicius SilvaAinda não há avaliações
- REDES DE FIBRA ÓPTICA ClaraDocumento21 páginasREDES DE FIBRA ÓPTICA Claramar1209704568100% (1)
- Atividade Online Pontuada 03 Revisao Da TentativaDocumento3 páginasAtividade Online Pontuada 03 Revisao Da TentativaBruno RodriguesAinda não há avaliações
- Delta Manual DVP Portugues PDF Parte6Documento100 páginasDelta Manual DVP Portugues PDF Parte6Maria JosefaAinda não há avaliações
- Z Pocket J45 S4hana1909 BPD PT BRDocumento34 páginasZ Pocket J45 S4hana1909 BPD PT BRMichael DieguezAinda não há avaliações
- Apresentação Comercial TinyDocumento19 páginasApresentação Comercial TinyLuis Claudio JalysAinda não há avaliações
- OLAPDocumento59 páginasOLAPWilton SantosAinda não há avaliações
- Sistema de Bilhetagem EletronicaDocumento31 páginasSistema de Bilhetagem EletronicadanielmnogueiraAinda não há avaliações
- HML5 Um Mero Resumo PDFDocumento81 páginasHML5 Um Mero Resumo PDFEduardo FranciscoAinda não há avaliações
- Plano de Ação EsocialDocumento4 páginasPlano de Ação EsocialPedro Martim De SouzaAinda não há avaliações
- Esqueceu Nome Ou Senha Do Moodle-UNEBDocumento3 páginasEsqueceu Nome Ou Senha Do Moodle-UNEBValnice100% (2)
- Apostila WordfastDocumento41 páginasApostila WordfastGabriela BezerraAinda não há avaliações
- MAPA - Qualidade de SoftwareDocumento2 páginasMAPA - Qualidade de SoftwarerrpachecoAinda não há avaliações
- Captura de Tela 2024-03-08 À(s) 20.28.59Documento84 páginasCaptura de Tela 2024-03-08 À(s) 20.28.59sofisteixeira2008Ainda não há avaliações
- Prova TiDocumento4 páginasProva TiGraca OliveiraAinda não há avaliações
- Estrutura de DadosDocumento99 páginasEstrutura de Dadosjoberth10% (1)
- Trabalho Prático Do Módulo 1 - 2021-3 - Bootcamp Desenvolvedor (A) Business IntelligenceDocumento9 páginasTrabalho Prático Do Módulo 1 - 2021-3 - Bootcamp Desenvolvedor (A) Business IntelligenceRacquel SelesAinda não há avaliações
- Lista CATSERDocumento222 páginasLista CATSERRoberta NevesAinda não há avaliações
- Manual de TICsDocumento175 páginasManual de TICsJamilo Dos Santos Jr.100% (1)
- 1.2.2.4 Lab - Cybersecurity Job HuntDocumento3 páginas1.2.2.4 Lab - Cybersecurity Job Huntrubenfernandes277Ainda não há avaliações
- Material de Apoio 2º Info - MAIO E JUNHODocumento3 páginasMaterial de Apoio 2º Info - MAIO E JUNHOMarcondes TiburcioAinda não há avaliações
- Prova Informática Medio 02Documento4 páginasProva Informática Medio 02Anne PazFAinda não há avaliações
- LAN 20x - 00 CCNA Routing & Switching PDFDocumento14 páginasLAN 20x - 00 CCNA Routing & Switching PDFdenissilvamaia5070Ainda não há avaliações
- Sicod - : Documentação Técnica de ProdutoDocumento88 páginasSicod - : Documentação Técnica de ProdutoRuddyAinda não há avaliações