Você também pode gostar
- Assembly - Aula 01Documento62 páginasAssembly - Aula 01rafaelmendoncaAinda não há avaliações
- Aula 01 - Variáveis e Estrutura SequencialDocumento98 páginasAula 01 - Variáveis e Estrutura SequencialDalila TavaresAinda não há avaliações
- Programação S7-1200 TIA Portal V11Documento11 páginasProgramação S7-1200 TIA Portal V11Pedro Henrique NevesAinda não há avaliações
- Manutenção de Computadores - Aula 01Documento31 páginasManutenção de Computadores - Aula 01chinoventuraAinda não há avaliações
- Editando - s7-Scl For s7-300 and s7-400 - ManualDocumento87 páginasEditando - s7-Scl For s7-300 and s7-400 - ManualGustavo FernandesAinda não há avaliações
- Ponteiro S7-1200Documento5 páginasPonteiro S7-1200Leandro FranciscoAinda não há avaliações
- Caderno de INFO (Redes de Computadores)Documento133 páginasCaderno de INFO (Redes de Computadores)Camila DomingosAinda não há avaliações
- Função Safety Inversor Siemens G120Documento22 páginasFunção Safety Inversor Siemens G120Fabio CamargoAinda não há avaliações
- PI Server GuideDocumento6 páginasPI Server GuideMayara CaldeiraAinda não há avaliações
- Redes Aula4Documento21 páginasRedes Aula4Noemar GiombelliAinda não há avaliações
- MICROCONTROLADORES: FUNDAMENTOS E PROGRAMAÇÃODocumento77 páginasMICROCONTROLADORES: FUNDAMENTOS E PROGRAMAÇÃODiogoAinda não há avaliações
- E3tutorial Advanced PTB PDFDocumento97 páginasE3tutorial Advanced PTB PDFarneauAinda não há avaliações
- Apostila MICRODocumento62 páginasApostila MICROjoaopedro2225Ainda não há avaliações
- Introdução a Macros no ExcelDocumento138 páginasIntrodução a Macros no Excelgabriella_botAinda não há avaliações
- S7-1200 - HSCDocumento7 páginasS7-1200 - HSCLeo CruzAinda não há avaliações
- Elipse - Tutorial Do E3 para Iniciantes PDFDocumento138 páginasElipse - Tutorial Do E3 para Iniciantes PDFRodrigo SudarioAinda não há avaliações
- Apostila Linguagem de ProgramaçãoDocumento183 páginasApostila Linguagem de ProgramaçãoIgor ChaconAinda não há avaliações
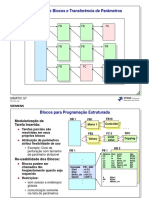
- Chamada de Blocos e ParâmetrosDocumento22 páginasChamada de Blocos e ParâmetrosMarcelo Dias BezerraAinda não há avaliações
- Apostila de Linguagem de Programação I e Estrutura de Dados PDFDocumento66 páginasApostila de Linguagem de Programação I e Estrutura de Dados PDFMatheus Barreto OliveiraAinda não há avaliações
- ARQSI05 Processadores SuperescalaresDocumento26 páginasARQSI05 Processadores SuperescalaresJéssica Roberta SouzaAinda não há avaliações
- Aula 3 - Sistemas de Controle e Sinais PDFDocumento64 páginasAula 3 - Sistemas de Controle e Sinais PDFMilene OliveiraAinda não há avaliações
- Rockwell - InversorDocumento144 páginasRockwell - InversorDudu TakaokiAinda não há avaliações
- (Apostilas Informática) Excel Básico - Julio BattistiDocumento380 páginas(Apostilas Informática) Excel Básico - Julio BattistifrancinerosaAinda não há avaliações
- Apostila VHDL MoraesDocumento36 páginasApostila VHDL Moraesvinicius.camatta100% (1)
- Estilos Arquiteturais em SoftwareDocumento40 páginasEstilos Arquiteturais em SoftwareJulio Cezar SilvaAinda não há avaliações
- Teoria de Banco de Dados: Procedimentos Armazenados em PL/pgSQLDocumento29 páginasTeoria de Banco de Dados: Procedimentos Armazenados em PL/pgSQLLuan OliveiraAinda não há avaliações
- Apostila Assembly MIPS Christiane PDFDocumento51 páginasApostila Assembly MIPS Christiane PDFmichael_dougras1325450% (2)
- Aula 6 - Sistemas de Numeracao PDFDocumento37 páginasAula 6 - Sistemas de Numeracao PDFRenan MastinsAinda não há avaliações
- BD2-2-procedimentos-2022 09 13 1124Documento60 páginasBD2-2-procedimentos-2022 09 13 1124anisiabarros01Ainda não há avaliações
- Fundamentos Sistemas OperacionaisDocumento43 páginasFundamentos Sistemas OperacionaisGabrielBMendesAinda não há avaliações
- Relatório PDF ProntoDocumento14 páginasRelatório PDF ProntoigorAinda não há avaliações
- Treinamento PIMSDocumento15 páginasTreinamento PIMStulyodetarsoAinda não há avaliações
- Sistemas MicroprocessadosDocumento16 páginasSistemas MicroprocessadosAndré Luiz WanderleyAinda não há avaliações
- XXI Simpósio Brasileiro de Redes de ComputadoresDocumento71 páginasXXI Simpósio Brasileiro de Redes de ComputadoresRenata CascaesAinda não há avaliações
- CLP Curso de RS Logix RockwellDocumento43 páginasCLP Curso de RS Logix Rockwellelton vales freitasAinda não há avaliações
- Programação Em C E Assembly Para A Família Mc68hc908No EverandProgramação Em C E Assembly Para A Família Mc68hc908Ainda não há avaliações
- Iot Para Medir Ph Com Esp32 Programado Em ArduinoNo EverandIot Para Medir Ph Com Esp32 Programado Em ArduinoAinda não há avaliações
- BD empresa engenharia distribuição funcionários departamentosDocumento11 páginasBD empresa engenharia distribuição funcionários departamentosGRAZIELE LIMA MIRANDAAinda não há avaliações
- Apostila Assembly PDFDocumento149 páginasApostila Assembly PDFNic CarvalhoAinda não há avaliações
- Sistemas Embarcados OkDocumento5 páginasSistemas Embarcados OkLeonardo LimaAinda não há avaliações
- Altium Design EAD PDFDocumento4 páginasAltium Design EAD PDFLuiz Clemente PimentaAinda não há avaliações
- Aula 16 - Industria 4.0 VDocumento61 páginasAula 16 - Industria 4.0 VArianeP.RubinAinda não há avaliações
- Trigger Procedimentoes FuncoesDocumento30 páginasTrigger Procedimentoes FuncoesCalisto AlbertoAinda não há avaliações
- CURSO WINCC - IntegradoDocumento33 páginasCURSO WINCC - IntegradoUbirajara PereiraAinda não há avaliações
- 04 Jflex PDFDocumento27 páginas04 Jflex PDFGuilherme LimaAinda não há avaliações
- Redes Aula6Documento17 páginasRedes Aula6Noemar GiombelliAinda não há avaliações
- Introdução à Organização de ComputadoresDocumento31 páginasIntrodução à Organização de ComputadoresWillian PeriettAinda não há avaliações
- SLC 500Documento142 páginasSLC 500Dener Dos Santos SantosAinda não há avaliações
- Atualize o firmware MicroPython no ESP32/ESP8266Documento18 páginasAtualize o firmware MicroPython no ESP32/ESP8266Alfonso FavorettiAinda não há avaliações
- Asm NasmDocumento72 páginasAsm NasmHigashi MonteiroAinda não há avaliações
- O que é Stored ProcedureDocumento4 páginasO que é Stored ProcedureLuskaAinda não há avaliações
- Automação Com Esp32 E Android Programado No Arduino E App InventorNo EverandAutomação Com Esp32 E Android Programado No Arduino E App InventorAinda não há avaliações
- Programação Vba - ExcelDocumento134 páginasProgramação Vba - ExcelMARCELO F. MENEGASSOAinda não há avaliações
- Uml Erva - Mate - DrawioDocumento1 páginaUml Erva - Mate - DrawioJoão Vitor Remocri LauschnerAinda não há avaliações
- Introducao Aos Sistemas ComputacionaisDocumento17 páginasIntroducao Aos Sistemas ComputacionaisJoão Vitor Remocri LauschnerAinda não há avaliações
- C Classe StackDocumento7 páginasC Classe StackJoão Vitor Remocri LauschnerAinda não há avaliações
- Dicas para dominar Linguagens no EnemDocumento134 páginasDicas para dominar Linguagens no Enemsayio100% (1)
- Material Aulas 1 2 3 4Documento90 páginasMaterial Aulas 1 2 3 4João Vitor Remocri LauschnerAinda não há avaliações
- Introducao Aos Sistemas ComputacionaisDocumento17 páginasIntroducao Aos Sistemas ComputacionaisJoão Vitor Remocri LauschnerAinda não há avaliações
- AC01 Tópicos Especiais em Tendências TecnológicasDocumento5 páginasAC01 Tópicos Especiais em Tendências TecnológicasYago Cardoso (DarK)Ainda não há avaliações
- Módulos 8 - 10 Comunicação Entre Redes Respostas Do Exame 2020 Correto 100%Documento26 páginasMódulos 8 - 10 Comunicação Entre Redes Respostas Do Exame 2020 Correto 100%Ugs ngu100% (3)
- Configuração e monitoramento de software para relé de proteção URPP2405Documento7 páginasConfiguração e monitoramento de software para relé de proteção URPP2405João CamiloAinda não há avaliações
- Pascal 2.2Documento40 páginasPascal 2.2Estephanie AlmeidaAinda não há avaliações
- Experimento Sistemas OperacionaisDocumento6 páginasExperimento Sistemas OperacionaisDiogo FurtadoAinda não há avaliações
- 01 Central de Deteção Teletek Eclipse 32 CaracterísticasDocumento1 página01 Central de Deteção Teletek Eclipse 32 CaracterísticasGonçaloAinda não há avaliações
- Lexmark CloudServices AdminGuide PTDocumento263 páginasLexmark CloudServices AdminGuide PTncfadelAinda não há avaliações
- Optiplex 3080 Desktop Service Manual7 PT BRDocumento40 páginasOptiplex 3080 Desktop Service Manual7 PT BRdrmwndrrAinda não há avaliações
- Sobre Os Professores: Prof. Rafael BittencourtDocumento24 páginasSobre Os Professores: Prof. Rafael Bittencourtnatty84Ainda não há avaliações
- Ficha Tecnica SMARTY ETRI01 (200901)Documento2 páginasFicha Tecnica SMARTY ETRI01 (200901)MiguelAinda não há avaliações
- mbpnfsv158-1320 ESQUEMA (DRTECH)Documento62 páginasmbpnfsv158-1320 ESQUEMA (DRTECH)overhouseautomacaoAinda não há avaliações
- Livro de AlgoritmosDocumento337 páginasLivro de AlgoritmosWilliam RobsonAinda não há avaliações
- Trabalho de ICCDocumento18 páginasTrabalho de ICCAlexandre gasparAinda não há avaliações
- O banco de dados como forma cultural na nova mídiaDocumento20 páginasO banco de dados como forma cultural na nova mídiaJulia LeryAinda não há avaliações
- Relatório de Estágio - Poliana de Sousa RosaDocumento32 páginasRelatório de Estágio - Poliana de Sousa RosaPolianaAinda não há avaliações
- Diagrama de Blocos (Fluxograma) : Customização Dúvidas Ao TutorDocumento12 páginasDiagrama de Blocos (Fluxograma) : Customização Dúvidas Ao TutorLenon RochaAinda não há avaliações
- 6.2.3.6 Packet Tracer - Configuring Multiarea OSPFv2 InstructionsDocumento3 páginas6.2.3.6 Packet Tracer - Configuring Multiarea OSPFv2 InstructionsRenatoAinda não há avaliações
- Arquitetura ComputadoresDocumento27 páginasArquitetura ComputadoresFilipe HiluyAinda não há avaliações
- Resultado Projetos PIBIC Divulga 2023-2024Documento241 páginasResultado Projetos PIBIC Divulga 2023-2024Bruno MeloAinda não há avaliações
- Linguagens de Script e PHPDocumento17 páginasLinguagens de Script e PHPanon_623151758Ainda não há avaliações
- AED II - ÁrvoresDocumento24 páginasAED II - ÁrvoresVanessa Silva MachadoAinda não há avaliações
- RST Mini 4GDocumento3 páginasRST Mini 4GRastec Segurança EletrônicaAinda não há avaliações
- Spanning Tree ProtocolDocumento17 páginasSpanning Tree ProtocolFrancelino SoaresAinda não há avaliações
- Minhas DisciplinasDocumento1 páginaMinhas DisciplinasAlexandra SoaresAinda não há avaliações
- Ava UnivirtusDocumento33 páginasAva UnivirtusLeopoldo Dos PassosAinda não há avaliações
- Curso de InformaticaDocumento50 páginasCurso de InformaticaEstêvão ManuelAinda não há avaliações
- Procedimento de Configuração Do Switch Aruba para o Cliente Pague Menos v2Documento10 páginasProcedimento de Configuração Do Switch Aruba para o Cliente Pague Menos v2Lucas SilvaAinda não há avaliações
- Kurose (Respostas)Documento82 páginasKurose (Respostas)heloiAinda não há avaliações
- Tecnologias PDH e SDH para transmissão de dadosDocumento26 páginasTecnologias PDH e SDH para transmissão de dadosRamon PrankeAinda não há avaliações
- WEG Wps Software Programacao Weg 10001027753 2.1x Manual Portugues BRDocumento821 páginasWEG Wps Software Programacao Weg 10001027753 2.1x Manual Portugues BRClaudeir SilvestreAinda não há avaliações