Você também pode gostar
- Configuração do MpLab IDE para programação e debug de microcontroladoresDocumento12 páginasConfiguração do MpLab IDE para programação e debug de microcontroladoresVITOR HUGOAinda não há avaliações
- Curso Avançado IRC5Documento123 páginasCurso Avançado IRC5Vinicius BoariAinda não há avaliações
- Manual - Manual Touch Screen - 8Documento25 páginasManual - Manual Touch Screen - 8Jose Luis SaldiasAinda não há avaliações
- Guia instalação MPLAB IDE & C18Documento23 páginasGuia instalação MPLAB IDE & C18f_clementeAinda não há avaliações
- Atualização de software para TVs LE3252i, LE4052i e LE4652iDocumento2 páginasAtualização de software para TVs LE3252i, LE4052i e LE4652iLipe ProduçõesAinda não há avaliações
- Manual - Portuguese - BrazilDocumento8 páginasManual - Portuguese - BrazilmariorcastroAinda não há avaliações
- Manual Passador Slides Help - H101 - enDocumento13 páginasManual Passador Slides Help - H101 - enRodrigo BridiAinda não há avaliações
- Manual Xinje Software OP20 - PORTDocumento36 páginasManual Xinje Software OP20 - PORTJEAN PIERREAinda não há avaliações
- Mobogenie Controlar Aparelhos Android No PCDocumento4 páginasMobogenie Controlar Aparelhos Android No PCBaixar mobogenie gratisAinda não há avaliações
- Prova - Algoritmos e Técnicas de ProgramaçãoDocumento3 páginasProva - Algoritmos e Técnicas de ProgramaçãoJuliana Alves Dos SantosAinda não há avaliações
- PeakSimple Advanced Tutorial - TraduzidoDocumento14 páginasPeakSimple Advanced Tutorial - TraduzidoEdsonAinda não há avaliações
- Instale e configure o Melt Control em 5 passosDocumento6 páginasInstale e configure o Melt Control em 5 passosAcir EvertonAinda não há avaliações
- Microsoft Word Trabalhando Com o MplabDocumento17 páginasMicrosoft Word Trabalhando Com o Mplabmarcelo19750000Ainda não há avaliações
- Bootloader PIC USB facilita desenvolvimentoDocumento5 páginasBootloader PIC USB facilita desenvolvimentoGuerra de Robôs100% (1)
- Controlar Leds Arduino via Bluetooth e Android emDocumento10 páginasControlar Leds Arduino via Bluetooth e Android emJosé PinheiroAinda não há avaliações
- M218 DM6200 Ioscan MBDocumento18 páginasM218 DM6200 Ioscan MBEdson KnobAinda não há avaliações
- Laboratório de Programação - RicardoproducaoDocumento113 páginasLaboratório de Programação - Ricardoproducaovictor100% (1)
- Comunicação OPC Codesys SoMachine Vijeo CitectDocumento15 páginasComunicação OPC Codesys SoMachine Vijeo Citectaoliveira_37293Ainda não há avaliações
- GT Designer 2: Abrindo e configurando projetoDocumento9 páginasGT Designer 2: Abrindo e configurando projetoKelly Leandro MazieroAinda não há avaliações
- Configurando robôs Fanuc Global 2Documento150 páginasConfigurando robôs Fanuc Global 2Giuseppe VarrialeAinda não há avaliações
- Manual do usuário sistema de diagnóstico automotivoDocumento24 páginasManual do usuário sistema de diagnóstico automotivoJose Ap SoaresAinda não há avaliações
- Aula 11 Code SysDocumento8 páginasAula 11 Code SysRafael Soares NoronhaAinda não há avaliações
- Manual do usuário sistema de diagnóstico automotivoDocumento24 páginasManual do usuário sistema de diagnóstico automotivoJulianoOliveiraAinda não há avaliações
- Desenvolvendo Um Conversor Km<->mi Programado Em Visual BasicNo EverandDesenvolvendo Um Conversor Km<->mi Programado Em Visual BasicAinda não há avaliações
- Instalação e Configuração do BlueROV2Documento12 páginasInstalação e Configuração do BlueROV2Rosiley Vianna100% (1)
- Comunicação Serial Com C# e Arduino - Parte 1 - EmbarcadosDocumento20 páginasComunicação Serial Com C# e Arduino - Parte 1 - Embarcadosnefilin28Ainda não há avaliações
- Guia de InstalaçãoDocumento8 páginasGuia de InstalaçãoDiego MarquesAinda não há avaliações
- Plotando Um Gráfico De Crescimento Demográfico Programado Em Visual BasicNo EverandPlotando Um Gráfico De Crescimento Demográfico Programado Em Visual BasicAinda não há avaliações
- Desenvolvendo Um Conversor Km<->mi Programado Em Visual C#No EverandDesenvolvendo Um Conversor Km<->mi Programado Em Visual C#Ainda não há avaliações
- Calculando O Índice De Inflação Programado Em Visual BasicNo EverandCalculando O Índice De Inflação Programado Em Visual BasicAinda não há avaliações
- Verificando A Dureza De Materiais Através Da Escala De Mohs Programado Em Visual BasicNo EverandVerificando A Dureza De Materiais Através Da Escala De Mohs Programado Em Visual BasicAinda não há avaliações
- SpeedTouch 510 V6 Atualização e configuraçãoDocumento7 páginasSpeedTouch 510 V6 Atualização e configuraçãoKM KamisariaAinda não há avaliações
- Sistema Electro-mecânico com Microcontrolador PIC16F873Documento12 páginasSistema Electro-mecânico com Microcontrolador PIC16F873Agostino BurlaAinda não há avaliações
- Tutorial - Logmein Computador TeleguiadoDocumento3 páginasTutorial - Logmein Computador TeleguiadoJose BarraAinda não há avaliações
- LINK32 - Manual Do Usuário - R1.00Documento43 páginasLINK32 - Manual Do Usuário - R1.00GILEADE MENEZES BARBOSAAinda não há avaliações
- Manual Convers or EthernetDocumento20 páginasManual Convers or EthernetAnderson PereiraAinda não há avaliações
- Cálculo De Número Mach Programado Em Visual BasicNo EverandCálculo De Número Mach Programado Em Visual BasicAinda não há avaliações
- Configuração Impressora Elgin I9Documento11 páginasConfiguração Impressora Elgin I9Victor RochaAinda não há avaliações
- Obtendo A Classificação Granulométrica Através Da Escala De Wentworth Programado Em Visual BasicNo EverandObtendo A Classificação Granulométrica Através Da Escala De Wentworth Programado Em Visual BasicAinda não há avaliações
- ZelioDocumento44 páginasZelioflaviolflcAinda não há avaliações
- Microchip MPLAB IDE V8 + C18 - Programação em CDocumento7 páginasMicrochip MPLAB IDE V8 + C18 - Programação em CNando100% (1)
- Plotando Um Gráfico Do Índice Glicêmico Programado Em Visual BasicNo EverandPlotando Um Gráfico Do Índice Glicêmico Programado Em Visual BasicAinda não há avaliações
- Computando A Fem Induzida No Condutor Programado Em Visual BasicNo EverandComputando A Fem Induzida No Condutor Programado Em Visual BasicAinda não há avaliações
- Manual HD Scanner g4Documento20 páginasManual HD Scanner g4RM ElectrónicaAinda não há avaliações
- Plotando Um Gráfico De Variação Do Euro Programado Em Visual BasicNo EverandPlotando Um Gráfico De Variação Do Euro Programado Em Visual BasicAinda não há avaliações
- Fichas Trabalho SA MEI 22 23Documento22 páginasFichas Trabalho SA MEI 22 23Achref Ben MabroukAinda não há avaliações
- Conectando na ECU Delphi da Comet GT 250Documento7 páginasConectando na ECU Delphi da Comet GT 250Victor OliveiraAinda não há avaliações
- Plotando Um Gráfico De Área Territorial De Países Programado Em Visual BasicNo EverandPlotando Um Gráfico De Área Territorial De Países Programado Em Visual BasicAinda não há avaliações
- Calculando O Montante Em Juros Compostos Programado Em Visual C#No EverandCalculando O Montante Em Juros Compostos Programado Em Visual C#Ainda não há avaliações
- Computando A Temperatura De Equilíbrio Programado Em Visual BasicNo EverandComputando A Temperatura De Equilíbrio Programado Em Visual BasicAinda não há avaliações
- DR-26-2012 Diploma Avaliacao DesempenhoDocumento7 páginasDR-26-2012 Diploma Avaliacao DesempenhoramiromarquesAinda não há avaliações
- Avaliação docente: procedimentos externosDocumento1 páginaAvaliação docente: procedimentos externoscarlaAinda não há avaliações
- Avaliação externa do desempenho docenteDocumento3 páginasAvaliação externa do desempenho docentecarlaAinda não há avaliações
- Tutorial - Robô MBotDocumento4 páginasTutorial - Robô MBotcarlaAinda não há avaliações
- Atividade Prática Final - Introdução Ao AutocadDocumento4 páginasAtividade Prática Final - Introdução Ao AutocadNádia OliveiraAinda não há avaliações
- Acessórios eletrônicos e carregadores a partir de R$7,00Documento7 páginasAcessórios eletrônicos e carregadores a partir de R$7,00Jannsen JustaAinda não há avaliações
- 5W2H - o Que É, Como Funciona e Por Que Você Deveria UsarDocumento14 páginas5W2H - o Que É, Como Funciona e Por Que Você Deveria UsarpatricialandiAinda não há avaliações
- Gerente Logística gerencia recebimento estocagem distribuiçãoDocumento3 páginasGerente Logística gerencia recebimento estocagem distribuiçãoLuiz MeloAinda não há avaliações
- Atividade de Pesquisa 01 - Fundamentos Da Eletricidade II - José Remy Pinto Da Silva AraújoDocumento3 páginasAtividade de Pesquisa 01 - Fundamentos Da Eletricidade II - José Remy Pinto Da Silva AraújoDiegoAlves100% (2)
- Dell Inspiron 14Z 8GB Windows 8Documento1 páginaDell Inspiron 14Z 8GB Windows 8Édio NetoAinda não há avaliações
- Gerador Diesel 1250 KVADocumento2 páginasGerador Diesel 1250 KVAWilly Delbone EliasAinda não há avaliações
- Aplicações de Robôs Industriais Com Garras MecânicasDocumento8 páginasAplicações de Robôs Industriais Com Garras MecânicasAnonymous QHHc0YWiUAinda não há avaliações
- Catálogo de Peças: Colheitadeira Autopropelida S550 STSDocumento1.348 páginasCatálogo de Peças: Colheitadeira Autopropelida S550 STSalisson mateus oliveira pereiraAinda não há avaliações
- Nova mídia e comunicaçãoDocumento3 páginasNova mídia e comunicaçãoDaniela LaurindoAinda não há avaliações
- Proposta SECTIGO P20040901Documento6 páginasProposta SECTIGO P20040901marcusmsAinda não há avaliações
- Relação de Empresas Cadastradas Que Não Possuem Atividade de Transporte Rodoviario de CargasDocumento79 páginasRelação de Empresas Cadastradas Que Não Possuem Atividade de Transporte Rodoviario de CargasLeonardo Diniz de LimaAinda não há avaliações
- 16 Escavação, Locação Da Obra E InfraestruturaDocumento6 páginas16 Escavação, Locação Da Obra E InfraestruturaRafael de Oliveira DiasAinda não há avaliações
- ManifestoDocumento1 páginaManifestoPoint DogAinda não há avaliações
- Python PenetraçãoDocumento178 páginasPython Penetraçãojuniormj1100% (1)
- Exercícios Complementares - Word 2019Documento14 páginasExercícios Complementares - Word 2019Sidnéa Balbino da Silva balbinoAinda não há avaliações
- ISO21503Documento21 páginasISO21503cass78Ainda não há avaliações
- Lista Manuais InfraestruturaDocumento2 páginasLista Manuais InfraestruturaRenato MonteiroAinda não há avaliações
- Apresentação CX Automatizada Padrão MANDocumento96 páginasApresentação CX Automatizada Padrão MANjohnny sabin100% (1)
- PCAM4020PN Manual de Instalacao AlphadigiDocumento13 páginasPCAM4020PN Manual de Instalacao AlphadigiAndre ImamuraAinda não há avaliações
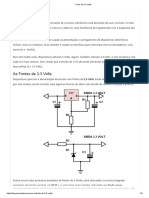
- Fonte de 3.3 VoltsDocumento3 páginasFonte de 3.3 Voltsjoao0honoratoAinda não há avaliações
- Resenha Texto 9Documento2 páginasResenha Texto 9Andrea SilvaAinda não há avaliações
- POP - SMPO.001 - Análise de Pleitos Da Ata de ProjetosDocumento14 páginasPOP - SMPO.001 - Análise de Pleitos Da Ata de ProjetosLigia ClausenAinda não há avaliações
- FTQ Cartas Criaturas Template EditavelDocumento2 páginasFTQ Cartas Criaturas Template EditavelGeek TrekAinda não há avaliações
- Portas Lógicas Aula 3Documento40 páginasPortas Lógicas Aula 3Waldir De Souza MotaAinda não há avaliações
- PCPT 4 V405 R 03Documento20 páginasPCPT 4 V405 R 03Alex Oliveira100% (1)
- Código de Erro Na BrotherDocumento1 páginaCódigo de Erro Na BrotherTRINO-INFORMATICA LAN HOUSEAinda não há avaliações
- Pedal de segurança PD3S-202 com 3 estágios de acionamentoDocumento2 páginasPedal de segurança PD3S-202 com 3 estágios de acionamentoFelipe MendesAinda não há avaliações
- Manual Maquina de Solda TRR 3410S MNRDocumento10 páginasManual Maquina de Solda TRR 3410S MNRObsol EtoAinda não há avaliações
- Uso da tecnologia bipolar em circuitos integrados atuaisDocumento15 páginasUso da tecnologia bipolar em circuitos integrados atuaisJessica JacksonAinda não há avaliações