Você também pode gostar
- 10 - Deus e Universo - Pietro Ubaldi (Volume Revisado e Formatado em PDF para Ipad - Tablet - E-Reader)Documento254 páginas10 - Deus e Universo - Pietro Ubaldi (Volume Revisado e Formatado em PDF para Ipad - Tablet - E-Reader)Glen Peach100% (4)
- RobóticaDocumento21 páginasRobóticaPriscila ComparsiAinda não há avaliações
- Pontos Positivos e Negativos Dos TemperamentosDocumento4 páginasPontos Positivos e Negativos Dos TemperamentosRosiane Portela de Paula Santos100% (1)
- Conceito Da Teoria de Motivacao de MaslowDocumento4 páginasConceito Da Teoria de Motivacao de MaslowAntonio LimaAinda não há avaliações
- Aula38 Robo Sumo EstruturaDocumento23 páginasAula38 Robo Sumo Estruturamlabru100% (1)
- Tuina Apostila Final 15-10-12Documento129 páginasTuina Apostila Final 15-10-12haczelAinda não há avaliações
- SQLITEDocumento2 páginasSQLITEKenned JrAinda não há avaliações
- Fichas de Matematica 2º AnoDocumento15 páginasFichas de Matematica 2º AnoAlzira Mesquita0% (2)
- Aula33 Seguidor Linha Ponte H Kit2023 v5Documento23 páginasAula33 Seguidor Linha Ponte H Kit2023 v5pedro.zamboniAinda não há avaliações
- Aula32 Kit Chassi 2wd RoboDocumento16 páginasAula32 Kit Chassi 2wd RoboPaulo HenriqueAinda não há avaliações
- Aula37 Trena Digital Kit 2023 em m1 v2Documento21 páginasAula37 Trena Digital Kit 2023 em m1 v2pedro.zamboniAinda não há avaliações
- Aula33 Seguidor LinhaDocumento13 páginasAula33 Seguidor Linhadiegooliveira101010Ainda não há avaliações
- Aula04 Arduino Uno Modulo1Documento14 páginasAula04 Arduino Uno Modulo1perozinAinda não há avaliações
- Aula16 Display 7segmentosDocumento18 páginasAula16 Display 7segmentosGABRIELI SALMORIAAinda não há avaliações
- Aula17 Olhos Piscantes Ef2 m2Documento36 páginasAula17 Olhos Piscantes Ef2 m2ANDREA DA SILVA CASTAGINI PADILHAAinda não há avaliações
- Aula31 Controle Motor DCDocumento15 páginasAula31 Controle Motor DCCicero MelloAinda não há avaliações
- Aula04 Semaforo Inteligente m2Documento21 páginasAula04 Semaforo Inteligente m2pjpj4565Ainda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Benzeno Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Benzeno Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Ozônio Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Ozônio Programado No ArduinoAinda não há avaliações
- Aula10 Robo Ultrassonico m2Documento24 páginasAula10 Robo Ultrassonico m2Lucas AppeltAinda não há avaliações
- Obtendo A Leitura De H2 No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De H2 No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Aula35 Sensor EstacionamentoDocumento18 páginasAula35 Sensor Estacionamentopedro.zamboniAinda não há avaliações
- Plotando Um Gráfico Para Ler Decibelímetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Decibelímetro Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Ozônio No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Ozônio No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Fluido No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Fluido No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De H2 Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De H2 Programado No ArduinoAinda não há avaliações
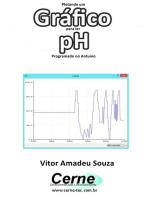
- Plotando Um Gráfico Para Ler Ph Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Ph Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Amônia Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Amônia Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Volume De Fluido Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Volume De Fluido Programado No ArduinoAinda não há avaliações
- Acesso A Nível De Bits/bytes Em Variáveis Programado No ArduinoNo EverandAcesso A Nível De Bits/bytes Em Variáveis Programado No ArduinoAinda não há avaliações
- Projetos Com Esp32 Programado Em Arduino - Parte XviiNo EverandProjetos Com Esp32 Programado Em Arduino - Parte XviiAinda não há avaliações
- Aula21 Super Maquina 80 Robotica Educacional m1 Versao2Documento23 páginasAula21 Super Maquina 80 Robotica Educacional m1 Versao2joaomc19711Ainda não há avaliações
- Obtendo A Leitura De Uv No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Uv No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Decibelímetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Decibelímetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Célula De Carga Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Célula De Carga Programado No ArduinoAinda não há avaliações
- Artigo Cubo de LeddDocumento7 páginasArtigo Cubo de Leddmateus anjosAinda não há avaliações
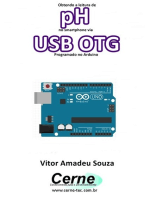
- Obtendo A Leitura De Ph No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Ph No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Benzeno No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Benzeno No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Acessando Um Sd Card Com Esp8266 Programado No ArduinoNo EverandAcessando Um Sd Card Com Esp8266 Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Concentração De Co Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Concentração De Co Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Co No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Co No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
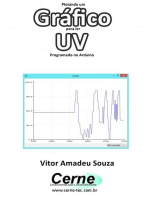
- Plotando Um Gráfico Para Ler Uv Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Uv Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Dinamômetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Dinamômetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Projeto Sensor de CorDocumento4 páginasProjeto Sensor de CorThiago CortezAinda não há avaliações
- Obtendo A Leitura De Célula De Carga No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Célula De Carga No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Amônia No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Amônia No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- FLBrazil 2016 Paper 111Documento4 páginasFLBrazil 2016 Paper 111Fábio AzevedoAinda não há avaliações
- Aula05 Softwares Arduino Ide MblockDocumento40 páginasAula05 Softwares Arduino Ide MblockJOAO PAULO PRIMO SARANNAinda não há avaliações
- Desenvolvendo Em App Inventor Para Android Um Supervisório Para Monitorar Concentração De H2 Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Em App Inventor Para Android Um Supervisório Para Monitorar Concentração De H2 Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Fundamentos de Programação PDFDocumento51 páginasFundamentos de Programação PDFtchepssilveiraAinda não há avaliações
- Aula 34 Mascote Se Mexe m1Documento18 páginasAula 34 Mascote Se Mexe m1MARIANA RIBINSKIAinda não há avaliações
- Artigo MNR - 2019Documento4 páginasArtigo MNR - 2019Ana LuizaAinda não há avaliações
- Desenvolvendo Em App Inventor Para Android Um Supervisório Para Monitorar Concentração De Ph Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Em App Inventor Para Android Um Supervisório Para Monitorar Concentração De Ph Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Fundamentos de Programação e de Eletrônica Com ArduínoDocumento51 páginasFundamentos de Programação e de Eletrônica Com ArduínorafaelaAinda não há avaliações
- 2) Artigo - ArduinoDocumento6 páginas2) Artigo - ArduinoRenan FontelesAinda não há avaliações
- Aula05 Softwares Arduino Mblock Modulo1Documento41 páginasAula05 Softwares Arduino Mblock Modulo1perozinAinda não há avaliações
- Plotando Um Gráfico Para Ler Barômetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Barômetro Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Dinamômetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Dinamômetro Programado No ArduinoAinda não há avaliações
- Desenvolvendo Em App Inventor Para Android Um Supervisório Para Monitorar Concentração De Co Usando O Esp8266 (nodemcu) Programado No ArduinoNo EverandDesenvolvendo Em App Inventor Para Android Um Supervisório Para Monitorar Concentração De Co Usando O Esp8266 (nodemcu) Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Barômetro No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Barômetro No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Plotando Um Gráfico Para Ler Gaussímetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Gaussímetro Programado No ArduinoAinda não há avaliações
- Obtendo A Leitura De Álcool No Smartphone Via Usb Otg Programado No ArduinoNo EverandObtendo A Leitura De Álcool No Smartphone Via Usb Otg Programado No ArduinoAinda não há avaliações
- Vigiar e PunirDocumento2 páginasVigiar e PunirFabportoAinda não há avaliações
- Estruturas de Madeira 05bDocumento12 páginasEstruturas de Madeira 05bMarcelo Issler Ferreira SousaAinda não há avaliações
- 2° Prova 7° Ano 4° BimestreDocumento2 páginas2° Prova 7° Ano 4° BimestreElielson Dos Santos FernandesAinda não há avaliações
- Faltas - Quadro ResumoDocumento4 páginasFaltas - Quadro ResumoAnonymous a39FXdueJoAinda não há avaliações
- Baixar Livro de Filosofia 11a ClasseDocumento49 páginasBaixar Livro de Filosofia 11a ClasseJamila IbrahimoAinda não há avaliações
- Certificado Amostra Ipiranga F1 Master SAE 5W30 API SN - TestemuDocumento2 páginasCertificado Amostra Ipiranga F1 Master SAE 5W30 API SN - TestemuMichael CabralAinda não há avaliações
- CAMILO - PolemicasDocumento8 páginasCAMILO - Polemicasw0lf3nst3inAinda não há avaliações
- Relatorio de Caracterizacao 2 - Preparo Reagente BradfordDocumento8 páginasRelatorio de Caracterizacao 2 - Preparo Reagente Bradforddiego guimarãesAinda não há avaliações
- Microsoft Word - SINTESE SOBRE DISTRIBUIÇAO, ABUNDANCIA, POTENCIAL PESQUEIRO E BIOLOGIA DA LAGOSTE DO NORDESTE DO BRASILDocumento23 páginasMicrosoft Word - SINTESE SOBRE DISTRIBUIÇAO, ABUNDANCIA, POTENCIAL PESQUEIRO E BIOLOGIA DA LAGOSTE DO NORDESTE DO BRASILcelio soaresAinda não há avaliações
- Barros Mangueiras Ii 2018 CatalogoDocumento18 páginasBarros Mangueiras Ii 2018 CatalogoPaulo Sergio Utinetti0% (1)
- Ricardo Reis - Heterónimo de Fernando PessoaDocumento2 páginasRicardo Reis - Heterónimo de Fernando PessoaAluno Leticia Rocha ValeAinda não há avaliações
- Aspectos Do Fantastico e Tradução de Um Conto de Marcel AyméDocumento42 páginasAspectos Do Fantastico e Tradução de Um Conto de Marcel AyméThiago TimAinda não há avaliações
- 269 Lição 2Documento9 páginas269 Lição 2Laura leouaAinda não há avaliações
- Capítulo 9. Teoria de JogosDocumento5 páginasCapítulo 9. Teoria de JogosJoão Victor Machado TrindadeAinda não há avaliações
- Poligonos SemelhantesDocumento4 páginasPoligonos SemelhantespcmcamposAinda não há avaliações
- Folheto Polo Hatch 2013 PDFDocumento2 páginasFolheto Polo Hatch 2013 PDFIvan MedinaAinda não há avaliações
- Rti Outubro2021Documento92 páginasRti Outubro2021sandro luis vieiraAinda não há avaliações
- PPC Farmacia 2012 Final PDFDocumento300 páginasPPC Farmacia 2012 Final PDFcgtnetoAinda não há avaliações
- AT-9,10 Comunicação de Dados, 2021Documento34 páginasAT-9,10 Comunicação de Dados, 2021Telcia Bento HeleAinda não há avaliações
- Rauski. Michelato. Música e Inclusão Social - o Trabalho Da Banda Marcial MaristaDocumento49 páginasRauski. Michelato. Música e Inclusão Social - o Trabalho Da Banda Marcial MaristaEgon Eduardo SAinda não há avaliações
- Incapacidadelaboral DuilioDocumento34 páginasIncapacidadelaboral DuilioAndrea MascarenhasAinda não há avaliações
- Filosofos ContratualistasDocumento2 páginasFilosofos Contratualistasricardoprimo456Ainda não há avaliações
- A Violência em "Rosso Malpelo" de Giovanni VergaDocumento9 páginasA Violência em "Rosso Malpelo" de Giovanni VergajorgedlopesAinda não há avaliações
- Decapagem QuimicaDocumento4 páginasDecapagem QuimicaLuis Carlos Mayer Pereira0% (1)