Você também pode gostar
- Introdução Aos Materiais e RevestimentosDocumento46 páginasIntrodução Aos Materiais e RevestimentosGuilherme correaAinda não há avaliações
- Lista de Exercícios - N2Documento11 páginasLista de Exercícios - N2Jackson RochaAinda não há avaliações
- Guia ITA-IME Do Lemann Do Fórum Pir2-1Documento8 páginasGuia ITA-IME Do Lemann Do Fórum Pir2-1RafaelRamosMarquesAinda não há avaliações
- Resumo - Trabalho e Potência - RevisãoDocumento1 páginaResumo - Trabalho e Potência - RevisãoEuvaldo Soares da SilvaAinda não há avaliações
- Procedimento LOTODocumento58 páginasProcedimento LOTOMario L. Souza100% (3)
- Lista01 2008 2Documento12 páginasLista01 2008 2diosnelrlAinda não há avaliações
- Ft1 1s 2013 Lista 02 Bernoulli Resolucao Ex 01 A 08 Site OficialDocumento9 páginasFt1 1s 2013 Lista 02 Bernoulli Resolucao Ex 01 A 08 Site OficialGilbert OliveiraAinda não há avaliações
- Emai Se 1 A 5Documento84 páginasEmai Se 1 A 5Lidiane Paula Valezi100% (1)
- Manual Nivelco EasyTREK SP-300 PT NivetecDocumento48 páginasManual Nivelco EasyTREK SP-300 PT NivetecfagnerAinda não há avaliações
- Noções Básicas de Treinamento Desportivo MarcadoDocumento66 páginasNoções Básicas de Treinamento Desportivo MarcadoEmerson SilvaAinda não há avaliações
- Artigo - Estudo Da Solubilidade Dos Compostos e Determinação de Álcool Na Gasolina 2 - 5 PráticaDocumento6 páginasArtigo - Estudo Da Solubilidade Dos Compostos e Determinação de Álcool Na Gasolina 2 - 5 PráticaValeriaBahiaAinda não há avaliações
- Museologia - Marcos Referenciais (Marília Xavier Cury)Documento30 páginasMuseologia - Marcos Referenciais (Marília Xavier Cury)Jennifer MonteiroAinda não há avaliações
- PERCLOROETILENO Rev04-2013Documento10 páginasPERCLOROETILENO Rev04-2013Alessandra FerreiraAinda não há avaliações
- Análise Do Comportamento À Fadiga Do Revestimento Asfáltico de Um Trecho Da Rodovia BR-230Documento5 páginasAnálise Do Comportamento À Fadiga Do Revestimento Asfáltico de Um Trecho Da Rodovia BR-230Lucas FelicettiAinda não há avaliações
- Procel GEM Gestao Energetica MunicipalDocumento3 páginasProcel GEM Gestao Energetica MunicipalRenato SwertsAinda não há avaliações
- Pop EspectrofotometriaDocumento3 páginasPop EspectrofotometriaRodrigo AlbuquerqueAinda não há avaliações
- Deus Na Pessoa Humana Segundo PannenbergDocumento125 páginasDeus Na Pessoa Humana Segundo PannenbergDiego Rivero100% (1)
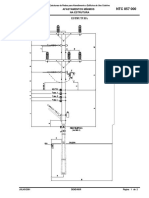
- NTC 857000 - Afastamento Mínimos Na EstruturaDocumento2 páginasNTC 857000 - Afastamento Mínimos Na EstruturaFabio SAinda não há avaliações
- Tecnologia Do PVC 2a Edição - 22 PDFDocumento450 páginasTecnologia Do PVC 2a Edição - 22 PDFLelecoYork50% (2)
- 1 Lista de Exercícios OrganicaDocumento3 páginas1 Lista de Exercícios OrganicaRamon LopesAinda não há avaliações
- Lista - Equações Diferenciais - ANPECDocumento2 páginasLista - Equações Diferenciais - ANPECDaniel MendonçaAinda não há avaliações
- A Gestão Do Tempo e Do EspaçoDocumento52 páginasA Gestão Do Tempo e Do EspaçoGuilherme Antunes100% (2)
- Inversor de Frequência - Roteiro de LaboratórioDocumento32 páginasInversor de Frequência - Roteiro de LaboratórioHelder CaldasAinda não há avaliações
- Atividade Contextualizada - Fund RESMAT - 01196094 - ENG. MECÂNICA - SÉRGIO HENRIQUE TEIXEIRA MELLODocumento2 páginasAtividade Contextualizada - Fund RESMAT - 01196094 - ENG. MECÂNICA - SÉRGIO HENRIQUE TEIXEIRA MELLOSérgio Mello100% (2)
- Definição, Medição e Transmissão de PressãoDocumento55 páginasDefinição, Medição e Transmissão de PressãoVisitanteAinda não há avaliações
- Os Estados Físicos Da MatériaDocumento2 páginasOs Estados Físicos Da MatériaFábio de OliveiraAinda não há avaliações
- A Guerra Dos Anjos Dominio Espiritual PDFDocumento640 páginasA Guerra Dos Anjos Dominio Espiritual PDFDorian Grey100% (1)
- Resistência Elétrica IDocumento4 páginasResistência Elétrica IJeferson Albino FleckAinda não há avaliações
- Dimensionamento de Fundacoes de Acordo Com o EC7 – Conceitos Fundamentais.Documento21 páginasDimensionamento de Fundacoes de Acordo Com o EC7 – Conceitos Fundamentais.Ricardo Gonçalves100% (1)
- Matemática 2º ANODocumento2 páginasMatemática 2º ANOMichelle M PinhoAinda não há avaliações