Escolar Documentos
Profissional Documentos
Cultura Documentos
Cap 7 Metodo Dos Deslocamentos Com Restricoes Nas Deformacoes PDF
Cap 7 Metodo Dos Deslocamentos Com Restricoes Nas Deformacoes PDF
Enviado por
RmuloTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Cap 7 Metodo Dos Deslocamentos Com Restricoes Nas Deformacoes PDF
Cap 7 Metodo Dos Deslocamentos Com Restricoes Nas Deformacoes PDF
Enviado por
RmuloDireitos autorais:
Formatos disponíveis
7.
MTODO DOS DESLOCAMENTOS COM
RESTRIES NAS DEFORMAES
O Mtodo dos Deslocamentos, conforme apresentado no captulo anterior, tem
uma metodologia de clculo bem mais simples do que a metodologia do Mtodo
das Foras, apresentado no Captulo 5. Alguns aspectos podem ser enumerados
para caracterizar esse fato. Por exemplo, no Mtodo dos Deslocamentos s existe
uma opo para a escolha do Sistema Hipergeomtrico (estrutura cinematicamente
determinada utilizada nos casos bsicos), enquanto que no Mtodo das Foras existem vrias opes para a escolha do Sistema Principal (estrutura estaticamente determinada utilizada nos casos bsicos). Tambm pode ser observado que o clculo
dos valores dos coeficientes de rigidez do sistema de equaes finais de equilbrio
do Mtodo dos Deslocamentos muito mais simples (soma direta de coeficientes
de rigidez de barras) do que o clculo dos coeficientes de flexibilidade do Mtodo
das Foras (integrais de energia de deformao). Esses dois fatores justificam o
fato da maioria dos programas de computador para anlise de estruturas adotar o
Mtodo dos Deslocamentos em suas implementaes.
Entretanto, a aplicao do mtodo (na forma apresentada no captulo anterior) para a resoluo manual de uma estrutura muito trabalhosa. Isso se deve ao nmero excessivo de incgnitas (deslocabilidades) que resulta da soluo, mesmo para
estruturas simples, e complexidade na considerao de barras inclinadas.
Na verdade, a forma apresentada no captulo anterior para o Mtodo dos Deslocamentos dirigida para uma soluo por computador. A formalizao do mtodo
para uma implementao computacional ser vista no Captulo 9, onde apresentado o Mtodo da Rigidez Direta.
Este captulo faz uma apresentao do Mtodo dos Deslocamentos de uma forma
clssica, voltada para a resoluo manual sem auxlio de computador, procurando
diminuir ao mximo o nmero de deslocabilidades. Essa forma em que o mtodo era apresentado em livros tradicionais de anlise de estruturas reticuladas, como o de Sssekind (1977-3).
Para tanto, so introduzidas simplificaes no comportamento das barras com respeito s suas deformaes. Isto , so adotadas restries nas deformaes das barras, como, por exemplo, a hiptese de que as barras no se deformam axialmente.
Essa hiptese tambm adotada comumente na resoluo manual pelo Mtodo
das Foras quando se despreza a parcela de energia de deformao axial no clculo
dos coeficientes de flexibilidade e termos de carga.
232 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Resumindo, este captulo apresenta o Mtodo dos Deslocamentos com restries
nas deformaes de barras com os seguintes objetivos:
Reduzir o nmero de deslocabilidades da estrutura, visando principalmente
uma resoluo manual.
Caracterizar o comportamento de prticos (quadros) com respeito aos efeitos
de deformaes axiais e de deformaes transversais por flexo das barras.
Embora a motivao inicial seja reduzir o nmero de deslocabilidades de uma estrutura, o segundo objetivo o mais importante na presente abordagem. O elementos estruturais de um prtico real tm deformaes axiais muito menores do
que as deformaes transversais por flexo. Portanto, a considerao de barras
sem deformao axial (chamadas de barras inextensveis) uma aproximao razovel para o comportamento de um quadro. A hiptese de barras inextensveis possibilita o entendimento do conceito de contraventamento ou travejamento de prticos,
que muito importante no projeto de estruturas. A apresentao desse conceito
um dos principais objetivos deste captulo.
Alm disso, este captulo apresenta alguns macetes de clculo, tal como eliminao
de trechos em balano, que tambm reduzem o nmero de incgnitas na soluo
pelo Mtodo dos Deslocamentos, sem introduzir nenhuma simplificao quanto ao
comportamento das estruturas.
7.1. Classificao das simplificaes adotadas
Pode-se classificar as simplificaes adotadas para diminuir o nmero de deslocabilidades na soluo de uma estrutura reticulada em quatro tipos:
Eliminao de trechos em balano;
Considerao de barras inextensveis;
Eliminao de deslocabilidades do tipo rotao de ns quando todas as barras adjacentes so articuladas no n;
Considerao de barras infinitamente rgidas.
A primeira simplificao , na verdade, um macete de clculo, visto que trechos em
balano de prticos podem ter seus esforos internos determinados isostaticamente
(basta calcular os esforos a partir das extremidades livres do balano).
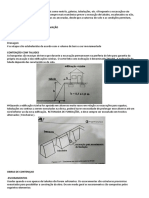
A Figura 7.1 mostra um exemplo dessa simplificao. A estrutura dividida em
duas partes: o trecho em balano e o restante. O balano calculado como uma
estrutura isosttica engastada no ponto de contato com o restante do prtico. O
prtico, sem o balano, calculado para uma fora e um momento obtidos pelo
transporte da fora que atua no balano para o ponto de contato.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 233
M = Pl
l
Figura 7.1 Separao do trecho em balano de um prtico plano.
A conseqncia da soluo do prtico da Figura 7.1 com a eliminao do trecho
em balano evidente. Considerando que cada n sem restrio de apoio tem 3
deslocabilidades, a estrutura completa com balano tem 21 deslocabilidades. A
mesma estrutura sem o balano tem apenas 6 deslocabilidades.
obvio que o clculo de deslocamentos nos pontos do balano depende da resposta do restante da estrutura. Entretanto, esse clculo pode ser feito por superposio de efeitos, somando-se aos deslocamentos do balano, considerado como engastado, o movimento de corpo rgido associado aos deslocamentos e rotao do
ponto de contato do restante do prtico com o balano.
7.2. Considerao de barras inextensveis
Uma simplificao comumente adotada na resoluo manual de estruturas pelo
Mtodo dos Deslocamentos a de que as barras no se deformam axialmente. Essa
simplificao chamada de hiptese de barras inextensveis e est fundamentada no
fato de que as barras usuais de um prtico tm em geral uma deformao axial
muito menor do que as deformaes transversais devidas ao efeito de flexo. Um
exemplo disso foi mostrado na Seo 4.3.1.1 do Captulo 4.
Deve-se observar que a soluo de uma estrutura com base nessa hiptese difere
um pouco da soluo sem a simplificao. Portanto, deve-se tomar cuidado com a
adoo dessa hiptese, que s se justifica para a resoluo manual de prticos planos pequenos.
A considerao de barras sem deformao axial, com o objetivo de diminuir o nmero de deslocabilidades de uma estrutura reticulada, est sempre associada hiptese de pequenos deslocamentos. A combinao dessas duas simplificaes tem
como conseqncia uma reduo drstica no nmero de deslocabilidades do tipo
translao, no afetando o nmero de deslocabilidades do tipo rotao. Isso explicado em seguida.
234 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Considere o prtico da Figura 7.2, cujas colunas (barras verticais) por hiptese no
tm deformao axial. Com essa hiptese, a distncia entre um n superior de um
lado da estrutura e o n correspondente na base no pode se alterar. Como os ns
da base so fixos, os ns superiores tm seus movimentos restringidos a um arco
de crculo centrado no n correspondente da base, tal como indica a Figura 7.2-a.
Esses arcos de crculo so os lugares geomtricos (LG) que definem as possveis posies que os ns superiores do prtico podem ocupar quando se considera as colunas inextensveis.
LG do n superior para
grandes deslocamentos
LG do n superior para
pequenos deslocamentos
(a)
(b)
Figura 7.2 Lugares geomtricos (LG) dos ns superiores de um prtico com colunas inextensveis.
Adotando-se tambm a hiptese de pequenos deslocamentos, pode-se aproximar o
arco de crculo por uma tangente ao crculo, tal como indicado na Figura 7.2-b.
Dessa forma, o LG de um n superior uma reta horizontal transversal ao eixo da
coluna correspondente.
Pode-se generalizar a conseqncia da combinao da hiptese de barras inextensveis com a hiptese de pequenos deslocamentos da seguinte maneira:
Hiptese de barras inextensveis (com pequenos deslocamentos): os dois ns extremos de uma barra s podem se deslocar relativamente na direo transversal ao eixo da barra.
Com base nessa hiptese, analisa-se a configurao deformada do prtico da Figura 7.3. As trs barras do prtico so inextensveis e a solicitao uma carga horizontal P aplicada no topo.
b
Figura 7.3 Configurao deformada (ampliada exageradamente) de um prtico com barras
inextensveis para uma carga horizontal no topo.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 235
Observe na Figura 7.3 que os ns superiores na configurao deformada tm a
mesma cota vertical h (em relao base) da configurao indeformada, embora as
colunas apresentem deslocamentos transversais por flexo. Aparentemente as colunas deveriam ter se alongado para isso ser possvel. De maneira anloga, os dois
ns superiores continuam tendo a mesma distncia b entre si na configurao deformada (os ns superiores tm o mesmo deslocamento horizontal ), embora a
viga tenha se deformado transversalmente.
Essas aparentes inconsistncias s fazem sentido se os deslocamentos realmente
forem pequenos. Na verdade, o que se considera com a hiptese de barras inextensveis (com pequenos deslocamentos) : a distncia, na direo do eixo indeformado,
entre os dois ns extremos de uma barra no se altera quando esta se deforma transversalmente por flexo.
A considerao de barras inextensveis para a estrutura da Figura 7.3 resulta na
reduo do nmero de deslocabilidades do tipo translao. A Figura 7.4-a indica
as deslocabilidades dessa estrutura para o caso de barras extensveis e a Figura 7.4b indica as deslocabilidades para o caso de barras inextensveis. Neste caso, como
os LGs dos dois ns superiores so retas horizontais, esses ns no tm deslocamentos verticais. Portanto, D2 = 0 e D5 = 0, isto , duas deslocabilidades do tipo
translao so eliminadas. Alm disso, os dois ns superiores tm deslocamentos
horizontais que so iguais, portanto D4 = D1. Isso elimina mais uma deslocabilidade do tipo translao, pois o mesmo parmetro de deslocabilidade horizontal est
associado aos dois ns superiores. Portanto, o nmero de deslocabilidades reduzido de 6 para 3.
barras extensveis
D2
barras inextensveis
D5
D2 = 0
D1
D6
D3
(a)
D4
D5 = 0
D1
D6
D3
D4 = D1
(b)
Figura 7.4 Reduo do nmero de deslocabilidades para o prtico da Figura 7.3.
Como foi dito, a considerao de barras inextensveis no afeta as deslocabilidades
do tipo rotao. Essa hiptese apenas reduz o nmero de deslocabilidades do tipo
translao.
Entretanto, essa vantagem acompanhada de uma desvantagem, que a complexidade na identificao das deslocabilidades do tipo translao. A Seo 7.2.2 resume as regras que so utilizadas para determinar deslocabilidades do tipo translao em prticos planos com barras inextensveis.
236 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Com a simplificao de barras inextensveis feita uma renumerao das deslocabilidades resultantes. costume numerar primeiro as deslocabilidades do tipo
rotao e depois as deslocabilidades do tipo translao. Para a estrutura da Figura
7.3, isso resulta na numerao mostrada na Figura 7.5. A Figura 7.5-a indica as
deslocabilidades com a notao adotada, e a Figura 7.5-b indica a interpretao
fsica das deslocabilidades.
D3
D3
D2
D1
D3
D3
D2
D1
D2
D1
(a)
(b)
Figura 7.5 Renumerao das deslocabilidades para o prtico da Figura 7.3.
No restante deste livro a seguinte terminologia ser adotada (Sssekind 1977-3):
Deslocabilidades internas: so as deslocabilidades do tipo rotao.
Deslocabilidades externas: so as deslocabilidades do tipo translao.
di: nmero total de deslocabilidades internas.
de: nmero total de deslocabilidades externas.
Na estrutura da Figura 7.5, D1 e D2 so deslocabilidades internas, D3 uma deslocabilidade externa, di = 2 e de = 1.
7.2.1. Exemplo de soluo de prtico com barras inextensveis
Para exemplificar a soluo de um prtico plano com barras inextensveis pelo Mtodo dos Deslocamentos, o exemplo adotado na Seo 6.6.2 ser analisado novamente. O objetivo fazer uma comparao com a soluo com barras extensveis
do captulo anterior. A Figura 7.6 mostra o modelo estrutural desse exemplo.
Figura 7.6 Exemplo de prtico com barras inextensveis e articulao na viga.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 237
Assim como na Seo 6.6.2, a articulao do n superior direito considerada na
extremidade direita da barra horizontal (da viga). A Seo 7.3 vai mostrar outras
possibilidades para considerar essa articulao.
As trs barras inextensveis tm a mesma seo transversal, com momento de inrcia I, e material com mdulo de elasticidade E. Na Seo 6.6.2 foi adotada uma
relao entre a rea e o momento de inrcia da seo transversal dada por A/I = 2
m-2. A hiptese de barras inextensveis anloga a considerar um valor infinito
para essa relao.
A Figura 7.7 mostra as deslocabilidades e o correspondente Sistema Hipergeomtrico (SH) da estrutura da Figura 7.6. Observa-se nessa figura que o SH apresenta
apenas trs apoios fictcios.
Deslocabilidades
D3
D1
D2
Sistema Hipergeomtrico (SH)
D3
3
1
Figura 7.7 Deslocabilidades e Sistema Hipergeomtrico da estrutura da Figura 7.6.
Com respeito s deslocabilidades internas, as chapas 1 e 2 do SH fixam as rotaes
D1 e D2 dos ns superiores. Observa-se que a chapa 2 impede a rotao da seo
do topo da coluna, pois a articulao interna est sendo considerada (modelada) na
extremidade direita da viga. V-se que a considerao de barras inextensveis no
altera a adio de apoios para o impedimento de deslocabilidades internas: na criao do SH, uma chapa fictcia adicionada para cada rotao livre.
Por outro lado, a adio de apoios no SH para impedir deslocabilidades externas
requer uma anlise adicional. Como os ns superiores no tm deslocamentos verticais (colunas inextensveis), no necessrio adicionar apoios fictcios para impedir esses deslocamentos. Alm disso, apenas um apoio (o apoio 3) necessrio
para fixar o deslocamento horizontal D3 dos dois ns superiores. Como a viga
inextensvel, o apoio 3 adicionado no n superior esquerdo tambm impede o deslocamento horizontal do n superior direito. Na verdade, o apoio 3 pode ser colocado indistintamente em qualquer um dos dois ns superiores. Nas duas situaes
o movimento horizontal dos ns superiores fica impedido.
Esse exemplo mostra que a criao do SH (e a identificao das deslocabilidades)
de um prtico com barras inextensveis no to direta como para o caso de barras extensveis. Com barras extensveis, cada n superior do prtico tem trs deslocabilidades (dois deslocamentos e uma rotao). Portanto, a criao do SH
238 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
simples: basta adicionar trs apoios fictcios por n (veja a Figura 6.29). J no caso
de barras inextensveis, a criao do SH do exemplo feita em duas fases. Na primeira, so inseridas duas chapas para impedir as deslocabilidades internas. Na
segunda feita uma anlise para identificar que necessrio inserir apenas um
apoio fictcio no SH para fixar a deslocabilidade externa.
Essa anlise adicional o preo que se paga para diminuir o nmero de deslocabilidades quando se adota a hiptese de barras inextensveis. Isso pode ser relativamente complexo no caso geral, principalmente quando existirem barras inclinadas.
A Seo 7.2.2 a seguir estabelece regras gerais para a adio de apoios fictcios no
SH para impedir deslocabilidades externas de prticos planos com barras inextensveis.
Uma vez obtido o SH da estrutura da Figura 7.6, a metodologia de clculo do Mtodo dos Deslocamentos segue o procedimento padro de superposio de casos
bsicos. Como a estrutura tem trs deslocabilidades, existem quatro casos bsicos:
o caso (0) isola o efeito da solicitao externa no SH e os demais casos isolam, individualmente, os efeitos das deslocabilidades. Isso mostrado a seguir.
Caso (0) Solicitao externa (carregamento) isolada no SH
20
30
10
+45
M0
[kNm]
10 = + 45 kNm
20 = 0
30 = 10 kN
Figura 7.8 Caso (0) da estrutura da Figura 7.6.
A Figura 7.8 mostra que o caso (0) desse exemplo semelhante ao do exemplo da
Seo 6.6.2 com barras extensveis. A principal diferena est na transmisso dos
esforos cortantes das extremidades da viga para esforos normais nas colunas.
Como no foram adicionados apoios fictcios no SH para impedir os deslocamentos verticais dos ns superiores, a viga vai buscar apoio na base da estrutura. Isto
, os cortantes que devem atuar nas extremidades da viga (com os dois ns extremos engastados) so fornecidos pelas reaes verticais dos apoios originais da base
da estrutura. V-se que as colunas, por serem inextensveis, tm que transmitir, via
esforo axial, as reaes da base para os cortantes nas extremidades da viga.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 239
Essa anlise leva a concluir que as colunas inextensveis tm esforos normais indefinidos a priori. Isto , os esforos normais nas colunas so conseqncia dos esforos cortantes na viga. De fato, como a barra no tem deformao axial, o seu esforo axial pode assumir qualquer valor.
Visto de uma outra forma, as colunas inextensveis so requisitadas a transmitir
(via esforo normal) os esforos cortantes das extremidades da viga em substituio aos apoios fictcios que no foram necessrios para criar o SH.
Observa-se tambm que a determinao das reaes nos apoios do SH (tanto reais
quanto fictcios) feita com base na configurao deformada que imposta. No
caso (0) mostrado na Figura 7.8, as reaes verticais da base foram determinadas
pelos valores dos esforos cortantes que devem atuar nas extremidades da viga
para que ela tenha uma configurao deformada com todos os ns fixos e a solicitao externa atuando.
Isso uma caracterstica do Mtodo dos Deslocamentos. sempre assim: conhecese a configurao deformada e, ento, se determinam os esforos e reaes de apoio.
Caso (1) Deslocabilidade D1 isolada no SH
K11
D1 = 1
K21
K31
+4EI/4
+3EI/6
M1
D1 = 1
6EI/42
+2EI/4
D1
2EI/4
3EI/62
3EI/62
K11 = + 3EI/6 + 4EI/4
K21 = 0
K31 = + 6EI/42
Figura 7.9 Caso (1) da estrutura da Figura 7.6.
O caso (1) desse exemplo est mostrado na Figura 7.9. Os coeficientes de rigidez
globais correspondentes a esse caso tambm esto indicados na figura. Como no
caso (0) acima, as reaes verticais dos apoios da base so determinadas pelos esforos cortantes que devem atuar nas extremidades da viga, que so transmitidos
via esforos normais pelas colunas.
Essa transmisso pode ser entendida com base na Figura 7.10, que mostra as barras
do caso (1) isoladas, indicando os esforos que atuam nas suas extremidades. Observa-se que o coeficiente K11 obtido pela soma dos momentos que devem atuar
nas extremidades da viga e da coluna que sofrem a rotao D1 = 1 que imposta.
240 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
O coeficiente K21 nulo pois a viga articulada na direita, no aparecendo um
momento na chapa 2. O coeficiente K31 corresponde ao esforo cortante no topo da
coluna da esquerda. E, finalmente, observa-se que os esforos cortantes nas extremidades da viga correspondem aos esforos normais nas colunas.
K11 = + 3EI/6 + 4EI/4
3EI/6
3EI/62
4EI/4
3EI/62
D1 = 1
3EI/62
3EI/62
6EI/42
K31 = + 6EI/42
D1
D1 = 1
6EI/42
2EI/4
3EI/62
3EI/62
Figura 7.10 Isolamento das barras no caso (1) da estrutura da Figura 7.6.
interessante comparar esse caso com o correspondente para barras extensveis,
indicado na Figura 6.33. Para barras extensveis, como existem apoios fictcios no
SH que impedem os deslocamentos verticais dos ns superiores, os cortantes nas
extremidades da viga no so transmitidos para as colunas e morrem logo nos
apoios adjacentes.
Caso (2) Deslocabilidade D2 isolada no SH
K22
0
K32
K12
+4EI/4
M2
D2 = 1
6EI/42
2EI/4
+2EI/4
K12 = 0
K22 = 0 + 4EI/4
K32 = + 6EI/42
Figura 7.11 Caso (2) da estrutura da Figura 7.6.
D2
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 241
A Figura 7.11 indica o caso (2) desse exemplo, com os correspondentes coeficientes
de rigidez globais. A caracterstica mais importante a ser observada nesse caso
que o coeficiente de rigidez K32 corresponde ao esforo cortante no topo da coluna
da direita. Isto , o apoio 3, que fica na esquerda do prtico, est recebendo o esforo cortante da coluna do outro lado. Esse esforo cortante est sendo transmitido via esforo normal pela viga, tal como mostrado na Figura 7.12.
6EI/42
K32 = + 6EI/42
K22 = + 4EI/4
6EI/42
6EI/42
4EI/4
x
D2
D2 = 1
6EI/42
2EI/4
Figura 7.12 Isolamento das barras no caso (2) da estrutura da Figura 7.6.
Observe que a configurao deformada do SH nesse caso a mesma que no caso
correspondente para barras extensveis mostrado na Figura 6.36. Entretanto, naquele caso a viga no solicitada a esforo normal, pois existe um apoio adjacente
ao n superior direito que impede o seu deslocamento horizontal.
Esse tipo de anlise evidencia a complexidade adicional da resoluo pelo Mtodo
dos Deslocamentos para barras inextensveis. A grande vantagem desse mtodo
era justamente a simplicidade nos procedimentos, que podiam ser facilmente automatizados. Por isso, na implementao computacional do mtodo, considera-se
em geral barras sem nenhuma restrio nas deformaes, embora isso acarrete um
maior nmero de incgnitas. A anlise com a hiptese de barras inextensveis,
como dito, s se justifica na resoluo manual.
Existe uma maneira alternativa para se determinar o valor do coeficiente de rigidez
K32, que baseada no equilbrio global do SH. O ponto de partida dentro da metodologia do Mtodo dos Deslocamentos sempre a configurao deformada imposta. Com base na configurao deformada do caso (2), na qual imposta uma rotao D2 = 1, os esforos cortantes e momentos fletores de todas as barras ficam determinados. Por conseguinte, as reaes de apoio na base da estrutura tambm
ficam determinadas. Nesse caso, como mostra a Figura 7.11, a reao horizontal na
coluna da esquerda nula e a reao horizontal na coluna da direita igual a
6EI/42, da direita para a esquerda Finalmente, o coeficiente de rigidez K32 determinado impondo que o somatrio de todas as foras horizontais seja nulo.
Essa maneira alternativa nem sempre possvel de ser aplicada. Nesse caso foi
possvel pois existia apenas uma incgnita com relao ao equilbrio na direo
242 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
horizontal. Essa alternativa por equilbrio global do SH vai ser salientada em outros exemplos no restante do captulo.
Caso (3) Deslocabilidade D3 isolada no SH
D3 = 1
K13
D3 = 1
K33
K23
+6EI/42
+6EI/42
M3
12EI/43
12EI/43
6EI/42
+6EI/42
+6EI/42
2
6EI/4
K13 = + 6EI/42 + 0
D3
K23 = + 6EI/42 + 0
K33 = + 12EI/43 + 12EI/43
Figura 7.13 Caso (3) da estrutura da Figura 7.6.
O ltimo caso desse exemplo mostrado na Figura 7.13. O caso (3) mostra que a
anlise para barras inextensveis pode ser bastante diferente da anlise para barras
extensveis. Com barras inextensveis, quando imposto um deslocamento D3 = 1
no caso (3), os dois ns superiores sofrem o mesmo movimento horizontal, pois a
viga nunca pode ter seu comprimento alterado. Isso significa que um deslocamento imposto em um n pode acarretar um deslocamento de outro n, o que nunca
acontece para o caso de barras extensveis.
Dessa forma, as duas colunas so mobilizadas (se deformam) quando o deslocamento D3 = 1 imposto. Por outro lado, a viga no se deforma pois as rotaes nas
extremidades esto fixas, tendo apenas um movimento de corpo rgido.
A Figura 7.14 explica a determinao dos coeficientes de rigidez globais desse caso.
Como se v nessa figura, os coeficientes de rigidez K13 e K23 correspondem aos
momentos fletores que devem atuar no topo das colunas quando imposto um
deslocamento horizontal unitrio no topo, mantendo a rotao fixa. O coeficiente
de rigidez K33 corresponde aos esforos cortantes no topo das colunas, sendo que o
esforo cortante da coluna da direita transmitido ao apoio fictcio 3 do SH via
esforo normal na viga.
Alternativamente, o coeficiente de rigidez K33 pode ser determinado pelo equilbrio
global do SH. Para tanto, as reaes horizontais na base do prtico ficam determinadas a priori pela configurao deformada das colunas (iguais a 12EI/43, da direita para esquerda). A imposio de somatrio nulo das foras horizontais resulta
em K33 = +24EI/43.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 243
12EI/43
K33 = + 12EI/43
+ 12EI/43
12EI/43
D3 = 1
12EI/43
D3 = 1
6EI/42
12EI/43
K13 = + 6EI/42
12EI/43
6EI/42
x
D3
K23 = + 6EI/42
12EI/43
6EI/42
6EI/42
Figura 7.14 Isolamento das barras no caso (3) da estrutura da Figura 7.6.
Equaes de equilbrio e determinao do diagrama de momentos fletores finais
O sistema de equaes de equilbrio do Mtodo dos Deslocamentos para esse exemplo mostrado abaixo com a correspondente soluo para as deslocabilidades
(em funo de 1/EI):
10 K 11
20 + K 21
K
30 31
K 12
K 22
K 32
K 13 D1 0
K 23 D2 = 0
K 33 D3 0
+ 45
3 2 0 3 8 D1 0
0 + EI 0
1 3 8 D2 = 0
10
3 8 3 8 3 8 D3 0
D1 = 67 ,78 EI
D2 = 56 ,66 EI .
D = + 151,06 EI
3
Observa-se que os valores das deslocabilidades para a soluo com barras inextensveis so ligeiramente diferentes dos valores das deslocabilidades correspondentes na soluo com barras extensveis da Seo 6.6.2 do Captulo 6. A rotao D1 da
presente soluo corresponde rotao D3 = 68,75/EI do exemplo da Seo 6.6.2.
A rotao D2 acima corresponde rotao D6 = 51,45/EI para barras extensveis.
Finalmente, o deslocamento horizontal D3 da soluo com barras inextensveis tem
um valor intermedirio entre os valores das deslocabilidades horizontais (D1 =
+156,55/EI e D4 = +137,25/EI) dos ns superiores do prtico com barras extensveis.
A configurao deformada final da estrutura e o diagrama de momentos fletores,
obtido pela superposio dos diagramas dos casos bsicos dada pela Equao (6.4),
esto indicados na Figura 7.15. Comparando essa figura com a Figura 6.37 da soluo com barras extensveis, observa-se que os momentos fletores finais das duas
solues so prximos.
244 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Configurao deformada:
Indicao dos momentos fletores
usando a conveno de sinais:
(ampliada exageradamente)
D3
D3
+11,1
11,1
D1
D2
D1
0
0
M
+22,8
Sentidos dos momentos fletores
nas extremidades das barras:
[kNm]
+28,3
Diagrama de momentos fletores:
(traado do lado das fibras tracionadas)
11,1
11,1
22,8
28,3
[kNm]
Figura 7.15 Configurao deformada e diagrama de momentos fletores da estrutura da Figura 7.6.
Na comparao entre as solues do prtico analisado com e sem a considerao
da hiptese de barras inextensveis, deve-se levar em conta que na Seo 6.6.2 foi
adotada uma relao entre a rea e o momento de inrcia da seo transversal dada
por A/I = 2 m-2, que um valor pequeno em relao a valores utilizados em estruturas usuais. Quanto maior for esta relao para uma barra, mais prxima ela estar do comportamento inextensvel. Apesar disso, as diferenas entre as duas solues analisadas no so muito grandes. Isso demonstra que a hiptese de barras
inextensveis fornece uma boa aproximao para a soluo de prticos feita manualmente.
7.2.2. Regras para determinao de deslocabilidades externas
de prticos planos com barras inextensveis
No exemplo resolvido na seo anterior foi visto que a identificao das deslocabilidades externas quando se adota a hiptese de barras inextensveis requer uma
anlise adicional para identificar as possveis translaes que os ns de um prtico
podem sofrer. O exemplo estudado relativamente simples, pois s tem uma barra horizontal e duas verticais.
O objetivo desta seo estabelecer regras para a identificao de deslocabilidades
externas (translaes) de um prtico plano qualquer com barras inextensveis, incluindo barras inclinadas.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 245
Na verdade, como vai ser visto, a maneira mais simples de se determinar as deslocabilidades externas de um prtico com barras inextensveis introduzindo os apoios fictcios para a criao do SH: a cada apoio necessrio para fixar uma translao
nodal identificada uma deslocabilidade externa.
As regras apresentadas a seguir so chamadas de regras de triangulao. Para entender essas regras, considere o prtico com duas barras inextensveis mostrado na
Figura 7.16.
LG do n superior com
relao ao inferior esquerdo
LG do n superior com
relao ao inferior direito
Figura 7.16 Triangulao formada por um n ligado a dois ns fixo por duas barras.
De acordo com a hiptese de barras inextensveis, o n superior da estrutura da
Figura 7.16 s pode se deslocar relativamente ao n inferior esquerdo perpendicularmente barra da esquerda. Isso define um lugar geomtrico (LG) para o n superior. Outro LG definido com relao ao n inferior direito: ele s pode se deslocar transversalmente barra da direita. Como o movimento do n superior tem
que satisfazer simultaneamente aos seus dois LGs, o deslocamento do n nulo.
Isto , a nica posio possvel do n na configurao deformada da estrutura a
sua posio original. Portanto, o n superior no tem deslocabilidades externas.
Com base nesse raciocnio, para impedir deslocabilidades externas de um prtico
plano com barras inextensveis, so definidas duas regras para a adio de apoios
fictcios no SH:
1.
Um n que estiver ligado a dois ns fixos translao por duas barras inextensveis no alinhadas (formando um tringulo) tambm fica fixo translao. Portanto, no necessrio adicionar um apoio fictcio a esse n. Caso o
n s esteja ligado a um n fixo por uma barra, ou a dois ns fixos por duas
barras alinhadas, deve-se adicionar um apoio para impedir o deslocamento
na direo transversal ao eixo dessa(s) barra(s).
2.
Um conjunto de barras inextensveis agrupadas em uma triangulao se
comporta como um corpo rgido para translaes. Portanto, deve-se procurar adicionar apoios para impedir o movimento de corpo rgido do conjunto.
Alguns exemplos da aplicao dessas regras so apresentados a seguir para a determinao do SH de prticos com barras inextensveis. As deslocabilidades no
so indicadas: cada uma identificada por um apoio fictcio necessrio para fixar
os ns da estrutura.
246 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Esses exemplos so analisados apenas com respeito s deslocabilidades externas.
Entretanto, as chapas fictcias que so adicionadas para impedir deslocabilidades
internas tambm so indicadas. Uma chapa fictcia adicionada para cada n que
tem a sua rotao livre. Os apoios fictcios so numerados da seguinte maneira:
primeiro numeram-se as chapas que impedem as deslocabilidades internas; em
seguida os apoios que impedem as deslocabilidades externas so numerados.
O primeiro exemplo corresponde a um prtico com dois pavimentos. Existem trs
situaes: pavimentos sem barras diagonais (Figura 7.17), primeiro pavimento com
uma diagonal e segundo pavimento sem diagonal (Figura 7.18), e os dois pavimentos com diagonal (Figura 7.19).
6
Figura 7.17 SH de um prtico com dois pavimentos sem barras diagonais.
Figura 7.18 SH de um prtico com dois pavimentos e uma diagonal no primeiro pavimento.
Figura 7.19 SH de um prtico com dois pavimentos e uma diagonal em cada pavimento.
No prtico da Figura 7.17, pela regra 1, necessrio adicionar o apoio 5 para impedir o movimento horizontal do n da esquerda do primeiro pavimento (o n que
tem a chapa 3). Isso faz com que, tambm pela regra 1, o n da direita desse pavimento no tenha deslocamento. Isto , o n com a chapa 4 tem seus movimentos
impedidos pois est ligado por duas barras inextensveis e no alinhadas a dois ns
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 247
fixos translao (o n com o apoio 5 e o n da base na direita), formando uma
triangulao. Portanto, no necessrio inserir mais apoios fictcios nesse pavimento. Observe que o apoio 5 pode ser colocado tanto no n da esquerda quanto
no da direita para impedir o deslocamento horizontal desse pavimento (os ns do
pavimento no tm deslocamentos verticais pois as colunas so inextensveis).
Por raciocnio anlogo, no segundo pavimento do prtico da Figura 7.17, necessrio adicionar apenas o apoio 6 para fixar os ns desse pavimento. Parte-se da
condio de que os ns do primeiro pavimento j esto fixos.
Para essa estrutura, contabilizando o nmero de chapas e apoios fictcios que foram inseridos para criar o SH, o nmero de deslocabilidades internas di = 4 e o
nmero de deslocabilidades externas de = 2.
No prtico com uma diagonal no primeiro pavimento mostrado na Figura 7.18 j
existe uma triangulao formada pelos dois ns da base com o n que tem a chapa
3. Portanto, pela regra 1, este n j est fixo e no necessrio adicionar um apoio
para impedir a translao horizontal do primeiro pavimento. Para o segundo pavimento, o comportamento igual ao da estrutura anterior, e necessrio adicionar o apoio 5 fixar os ns do pavimento. Nesse caso, di = 4 e de = 1.
No ltimo prtico dessa srie, o prtico com duas diagonais mostrado na Figura
7.19, observa-se que, pela regra 1 de triangulao, no necessrio inserir nenhum
apoio para impedir deslocabilidades externas (di = 4 e de = 0). Esse prtico, por
no ter deslocabilidades do tipo translao, chamado de prtico indeslocvel (Sssekind 1977-3).
As barras inclinadas dos exemplos acima tm a funo de impedir deslocamentos
horizontais dos pavimentos. Essas barras so chamadas de barras de contraventamento ou travejamento, em uma aluso ao fato que essas barras enrijecem a estrutura para resistir a cargas laterais de vento. Na verdade, elas aumentam a rigidez do
prtico no somente para resistir a cargas laterais, mas tambm a cargas verticais
que tambm podem provocar deslocamentos horizontais, dependendo da configurao do prtico.
O conceito de contraventamento de prticos, isto , de insero de barras diagonais em
painis da estrutura, muito importante no projeto estrutural, principalmente no
caso de estruturas metlicas que tm as peas estruturais mais esbeltas do que no
caso de estruturas de concreto armado, por exemplo. necessrio contraventar
uma estrutura para impedir o aparecimento de grandes deslocamentos horizontais.
Um prtico sem barras inclinadas de contraventamento pode apresentar, apenas
por causa das deformaes por flexo das barras, deslocamentos horizontais muito
grandes, incompatveis com o bom funcionamento de uma estrutura civil.
necessrio entender que sempre vo aparecer deslocamentos horizontais em um
prtico, mesmo com barras de contraventamento, pois estas tambm se deformam
axialmente. Entretanto, como a deformao axial de uma barra usual de uma es-
248 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
trutura muito menor do que as deformaes transversais por flexo, os deslocamentos horizontais so muito menores quando se projeta uma estrutura com barras de contraventamento.
Um outro exemplo de um prtico contraventado mostrado na Figura 7.20. interessante observar que, para tornar esta estrutura indeslocvel, s necessrio
introduzir uma barra inclinada por pavimento (em apenas um compartimento ou
baia por pavimento). Isto , como as vigas do pavimento so inextensveis, basta
que um n do pavimento tenha o seu movimento horizontal impedido para que
todos os outros ns do pavimento tambm tenham seus deslocamentos horizontais
impedidos. Na estrutura da Figura 7.20, por triangulao, o n com a chapa 7 est
fixo. Tambm por triangulao, todos os outros ns do pavimento ficam fixos.
Para o pavimento superior, o mesmo raciocnio se aplica. Partindo do fato de que
os ns do primeiro pavimento esto fixos, observa-se que a nica diagonal do
segundo pavimento suficiente para contraventar esse pavimento.
10
Figura 7.20 SH de um prtico com dois pavimentos e contraventado em uma baia por pavimento.
No contraventamento de prticos, comum colocar duas diagonais com inclinaes opostas por pavimento. Isso porque, dependendo do sentido das cargas laterais, uma diagonal vai trabalhar compresso e a outra trao. Esse procedimento adotado para evitar que o contraventamento deixe de surtir efeito no caso da
diagonal que trabalha compresso perder a estabilidade quando submetida a valores altos de esforos axiais (a perda de estabilidade de barras submetidas a esforos de compresso um fenmeno que se denomina flambagem). A Figura 7.21
mostra o exemplo de um prtico com dois pavimentos contraventado com dois
tirantes por pavimento. Um tirante contraventa o pavimento para cargas laterais
da esquerda para direita e o outro tirante para cargas laterais no sentido oposto.
Figura 7.21 Prtico com dois pavimentos contraventado com dois tirantes por pavimento.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 249
A seqncia de prticos mostrados nas Figuras 7.22 a 7.25 analisa a criao do SH
para uma estrutura com trs painis no segundo pavimento, mas sem as colunas
centrais no primeiro pavimento.
12
10
11
Figura 7.22 SH de um prtico com trs painis sem diagonais.
10
11
Figura 7.23 SH de um prtico com trs painis e uma diagonal no painel central.
10
Figura 7.24 SH de um prtico com trs painis e duas diagonais.
Figura 7.25 SH de um prtico com trs painis e trs diagonais.
O primeiro prtico, mostrado na Figura 7.22, no tem barras inclinadas nos painis.
Nesse caso, o apoio 9 adicionado no n da esquerda do primeiro pavimento suficiente para impedir o movimento horizontal de todos os ns desse pavimento.
Entretanto, somente os ns que tm as chapas 5 e 8 tm os deslocamentos verticais
fixos, pois no existem colunas no pavimento inferior para restringir os deslocamentos verticais dos outros ns. Portanto, os apoios 10 e 11 so inseridos para impedir esses deslocamentos verticais. Para o segundo pavimento, como no existem
barras inclinadas, necessrio inserir o apoio 12 para impedir o deslocamento ho-
250 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
rizontal do pavimento. Os deslocamentos verticais de todos os ns do segundo
pavimento so nulos pois eles esto ligados por colunas (inextensveis) aos ns do
primeiro pavimento, que esto todos fixos. Portanto, mais nenhum apoio necessrio para criar o SH. O resultado em termos do nmero de deslocabilidades di =
8 e de = 4.
O segundo prtico dessa srie (Figura 7.23) tem uma diagonal no painel central do
seu segundo pavimento. Aps a insero dos apoios 10 e 11, essa barra inclinada
suficiente para impedir as translaes dos ns do segundo pavimento. Isso porque, por triangulao, o n que tem a chapa 2 fica fixo translao pois est ligado
aos ns (fixos) que tm as chapas 6 e 7 por duas barras no alinhadas. Os demais
ns do segundo pavimento tambm ficam fixos por triangulao, resultando em di
= 8 e de = 3.
interessante observar que, aps a adio do apoio 10, o apoio 11 do SH da Figura
7.23 poderia ter sido colocado alternativamente fixando o movimento horizontal
do n que tem a chapa 1. Nesse caso, por triangulao, os ns que tm as chapas 2,
7, 3 e 4 (nesta ordem) tambm ficariam fixos. Isso mostra que, quando se adota a
hiptese de barras inextensveis, no existe s um SH possvel, embora as alternativas sejam semelhantes, como no caso da estrutura da Figura 7.23.
Conforme observado anteriormente, essa hiptese elimina em parte a vantagem
que o Mtodo dos Deslocamentos tem na facilidade de automatizao dos seus
procedimentos. A prpria anlise que se faz nesta seo, explorando as regras de
triangulao, mostra que no simples criar um algoritmo para identificar deslocabilidades externas em um prtico com barras inextensveis.
A Figura 7.24 mostra o terceiro prtico da seqncia, com diagonal nos dois painis da esquerda. Nesse caso, aps a adio do apoio 10, o n que tem a chapa 1
fica fixo por causa da barra inclinada no painel da esquerda. Depois disso, assim
como para o SH da Figura 7.23, os demais ns tambm ficam fixos, resultando em
di = 8 e de = 2.
Finalmente, na Figura 7.25 v-se o SH do prtico com diagonal nos trs painis.
Intuitivamente (pela seqncia de prticos estudada), de se imaginar que o nmero de deslocabilidades externas desse prtico seja de = 1. Entretanto, mesmo
depois de adicionar o apoio 9 para prender o movimento horizontal do primeiro
pavimento, no possvel encontrar outro n que se ligue a dois ns fixos por duas
barras no alinhadas. A nica maneira de demonstrar que de = 1 lanando mo
da regra 2, que at agora no foi utilizada. Observe que o conjunto de barras dos
trs painis forma uma triangulao completa. Esse conjunto, pela regra 2, tem um
comportamento de corpo rgido para translaes. Para prender os movimento de
corpo rgido desse conjunto, considerando que os deslocamentos verticais dos ns
do topo das colunas inextensveis do primeiro pavimento so nulos, v-se que s
necessrio fixar o movimento horizontal em um ponto, o que feito pelo apoio 9.
Alis, esse apoio poderia ser colocado em qualquer n da triangulao.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 251
Dois exemplos adicionais so considerados para exemplificar a criao de SH para
prticos planos com barras inextensveis. Eles esto mostrados nas Figuras 7.26 e
7.27.
8
4
5
Figura 7.26 SH de um prtico com um apoio simples do 1 gnero.
O prtico da Figura 7.26 semelhante ao prtico da Figura 7.17, com exceo de
que o suporte da direita um apoio simples que s restringe o deslocamento vertical do n (apoio do 1 gnero). Nesse caso, na criao do SH, tanto a deslocabilidade interna quanto o deslocamento horizontal desse n tm que ser fixados (chapa 5 e apoio 6).
1
4
4
3
1
5
Figura 7.27 Duas opes para SH de um prtico com vigas inclinadas.
Por ltimo, a Figura 7.27 mostra um prtico com duas vigas inclinadas, mas sem
uma barra horizontal que una os ns no topo das colunas. Pela regra 1 de triangulao, preciso inserir o apoio 4 e o apoio 5 para impedir os deslocamentos horizontais desses ns, tal como indicado no centro da figura. O n que tem a chapa 1
fica fixo aps a insero desses apoios. Alternativamente, conforme indicado
direita da figura, pode-se fixar os movimentos do n com a chapa 1 com os apoios
4 (horizontal) e 5 (vertical). Isso fixa, por triangulao, os dois outros ns.
7.3. Simplificao para articulaes completas
Na Seo 7.2.1 foi analisado um prtico simples com barras inextensveis e uma
articulao (rtula) interna. Essa articulao, embora tenha sido considerada na
extremidade direita da viga (veja a Figura 7.6), tambm articulou a seo no topo
da coluna da direita. De fato, o momento fletor final no topo da coluna tambm
nulo (veja a Figura 7.15). Esse resultado bvio: uma rtula, na qual convergem
duas barras, articula as sees adjacentes de ambas as barras.
252 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Mas fica a pergunta: e se a seo no topo da coluna tambm tivesse sido modelada
com uma rtula? Pela observao acima, isso seria uma redundncia, visto que
uma nica rtula j suficiente para articular a seo da extremidade direita da
viga e a seo no topo da coluna.
Entretanto, conforme ser mostrado nesta seo, essa redundncia pode resultar na
diminuio de uma deslocabilidade interna na soluo do problema: a rotao do
n completamente articulado. Isso se configura em um macete de clculo que no
modifica os resultados.
Para justificar esse truque de clculo, a rtula da estrutura da Seo 7.2.1 vai ser
modelada de mais duas formas diferentes, uma com a coluna articulada e outra
com a viga e a coluna articuladas. Portanto, ao todo so mostradas trs maneiras
de se considerar a articulao da estrutura da Figura 7.6:
(a) Viga articulada na extremidade direita e coluna direita no articulada (j
mostrado na Seo 7.2.1).
(b) Coluna direita articulada no topo e viga no articulada (Seo 7.3.1).
(c) Viga e coluna articuladas no n superior direito (Seo 7.3.2).
7.3.1. Prtico com articulao no topo de uma coluna
Como dito, a mesma estrutura analisada na Seo 7.2.1 vai ser analisada nesta seo. A diferena que nesta seo a articulao interna vai ser considerada no topo da coluna direita, tal como indicado na Figura 7.28, ao invs de consider-la na
extremidade direita da viga. A soluo (b) com a rtula no topo da coluna semelhante soluo (a) comentada na Seo 7.2.1. Portanto, apenas alguns pontos em
que as duas solues diferem entre si sero salientados.
Figura 7.28 Exemplo de prtico com barras inextensveis e articulao em coluna.
As deslocabilidades da estrutura so basicamente as mesmas da soluo (a) (veja a
Figura 7.7), excetuando-se o fato de que a rotao D2 agora corresponde rotao
da seo da extremidade direita da viga. Como conseqncia, a chapa 2 do SH da
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 253
soluo (b) fica acima da rtula no topo da coluna da direita. Isso pode ser visto
nas figuras dos casos bsicos dessa soluo, mostrados a seguir.
Caso (0) Solicitao externa (carregamento) isolada no SH
20
30
1
3
10
30
+30
M0
[kNm]
0
10 = + 30 kNm
20 = 30 kNm
30 = 10 kN
Figura 7.29 Caso (0) da estrutura da Figura 7.28.
O caso (0) da soluo (b), mostrado na Figura 7.29, difere do caso (0) da soluo (a)
(Figura 7.8) nos momentos de engastamento da viga, que agora considerada sem
articulao. Por conseguinte, os termos de carga 10 e 20 mostrados na Figura 7.29
correspondem soluo de viga biengastada. O termo de carga 30 igual ao da
soluo (a).
Caso (1) Deslocabilidade D1 isolada no SH
K11
D1 = 1
K21
K31
+4EI/4
+4EI/6
+2EI/6
0
M1
D1 = 1
6EI/42
+2EI/4
D1
2EI/4
6EI/62
6EI/62
K11 = + 4EI/6 + 4EI/4
K21 = + 2EI/6
K31 = + 6EI/42
Figura 7.30 Caso (1) da estrutura da Figura 7.28.
O caso (1) da soluo (b) com articulao na coluna (Figura 7.30) tambm difere do
caso (1) da soluo (a) (Figura 7.9) somente na viga, que agora se comporta como
254 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
uma barra biengastada. Isso altera os coeficientes de rigidez K11 e K21. Este ltimo
nulo na soluo (a) e diferente de zero na soluo (b).
Caso (2) Deslocabilidade D2 isolada no SH
K22
K32
K12
D2 = 1
+2EI/6
+4EI/6
0
M2
0
6EI/62
6EI/62
D2
K12 = + 2EI/6
K22 = + 4EI/6 + 0
K32 = 0
Figura 7.31 Caso (2) da estrutura da Figura 7.28.
O caso (2) das solues com articulao na viga (Figura 7.11) e com articulao na
coluna (Figura 7.31) so bastante diferentes. Na primeira soluo, a rotao D2 = 1
imposta no topo da coluna e, na segunda, a rotao D2 = 1 imposta na seo da
extremidade direita da viga. Com isso, o coeficiente de rigidez K12 no mais nulo
como na soluo (a) e o coeficiente de rigidez global K22 agora corresponde ao
coeficiente de rigidez rotao da viga, e no da coluna como na soluo (a).
Uma outra diferena marcante o fato da coluna da direita no sofrer flexo na
soluo (b), no aparecendo tambm esforo cortante nessa coluna. Dessa forma, o
coeficiente de rigidez global K32, que est associado ao esforo cortante no topo da
coluna, nulo na soluo (b).
Tambm se observa que no existem reaes de apoio horizontais no caso (2) da
Figura 7.31, mostrando de forma alternativa que, por equilbrio global de foras na
direo horizontal, o coeficiente K32 igual a zero.
Caso (3) Deslocabilidade D3 isolada no SH
Finalmente, o caso (3) da soluo (b), mostrado na Figura 7.32, difere do caso (3) da
soluo (a) apenas no comportamento da coluna da direita. Com isso, o coeficiente
de rigidez global K23 nulo na soluo (b) pois o topo da coluna articulado. O
coeficiente de rigidez K33 tambm diferente pois o esforo cortante na coluna da
direita agora corresponde ao de uma barra com engaste na base e articulao no
topo.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 255
D3 = 1
D3 = 1
K13
K23
K33
+6EI/42
M3
12EI/43
3EI/43
6EI/42
+6EI/42
+3EI/42
3EI/42
K13 = + 6EI/42 + 0
D3
K23 = 0 + 0
K33 = + 12EI/43 + 3EI/43
Figura 7.32 Caso (3) da estrutura da Figura 7.28.
Equaes de equilbrio
Com base nos casos bsicos da soluo (b) para o exemplo que est sendo analisado, monta-se o correspondente sistema de equaes de equilbrio. Isso est indicado abaixo juntamente com os valores obtidos para as deslocabilidades (em funo
de 1/EI):
+ 30
53
30 + EI 1 3
10
3 8
13
2 3
0
3 8 D1 0
D1 = 67 ,78 EI
0 D2 = 0 D2 = + 78,88 EI .
D = + 151,06 EI
15 64 D3 0
3
Nota-se que os valores obtidos para a rotao D1 e para o deslocamento horizontal
D3 so os mesmos obtidos na soluo (a) (Seo 7.2.1). Entretanto, o valor obtido
para a rotao D2 difere do valor obtido anteriormente. Isso era esperado, haja vista que essa rotao tem interpretaes fsicas diferentes nas duas solues, tal como
indicado na Figura 7.33. Essa figura mostra as configuraes deformadas da soluo (a) viga articulada e da soluo (b) coluna articulada.
Configurao deformada
(coluna articulada)
D3
D3
Configurao deformada
(viga articulada)
D3
D3
D1
D1
D2( a )
D1
D1
D2( b )
Figura 7.33 Configuraes deformadas das estruturas das Figuras 7.6 e 7.28.
256 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Observa-se na Figura 7.33 que a rotao D2 da soluo (a) no sentido horrio, correspondendo ao valor negativo D2( a ) = 56,66/EI, enquanto que na soluo (b) o
sentido anti-horrio, compatvel com o valor positivo D2( b ) = +78,88/EI. Fica claro na figura que D2( a ) corresponde rotao da seo do topo da coluna quando a
articulao pertence viga e que D2( b ) corresponde rotao na extremidade direita da viga para o caso da articulao pertencer coluna. Portanto, os valores de D2
tinham mesmo que ser diferentes nas duas solues.
Apesar disso, como no podia deixar de ser, os resultados finais para os esforos
internos (e reaes de apoio) obtidos pela soluo (b) so os mesmos da soluo (a).
Por exemplo, pode-se verificar que a superposio dos diagramas de momentos
fletores (M = M0 + M1D1 + M2D2 + M3D3) da soluo (b) resulta no mesmo diagrama da soluo (a) mostrado na Figura 7.15.
7.3.2. Prtico com articulao dupla na viga e coluna
Finalmente, o prtico analisado nas Sees 7.2.1 e 7.3.1 ser analisado nesta seo
considerando que tanto a viga quanto a coluna da direita contm uma rtula no n
superior direito soluo (c). Conforme mencionado anteriormente, o objetivo
dessa anlise justificar um truque de clculo que elimina a deslocabilidade
interna de um n com articulao completa (com as sees adjacentes rotuladas).
O modelo estrutural da soluo (c) est mostrado na Figura 7.34, onde a articulao
completa do n superior direito est indicada. As Figuras 7.35, 7.36, 7.37 e 7.38
mostram os casos (0), (1), (2) e (3), respectivamente.
Figura 7.34 Exemplo de prtico com barras inextensveis e articulao dupla na viga e coluna.
Quase todos os casos bsicos da soluo (c) tm aspectos semelhantes aos da soluo (a) ou da soluo (b). Por exemplo, o caso (0) mostrado na Figura 7.35 tem os
mesmos resultados do caso (0) da soluo (a) (Figura 7.8).
Salienta-se o fato de que tudo o que se refere deslocabilidade D2 na soluo (c)
nulo. Dessa forma, o termo de carga 20 igual a zero. O coeficiente de rigidez K21
do caso (1) (Figura 7.36), que semelhante ao caso (1) da soluo (a) (Figura 7.9),
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 257
tambm nulo. Analogamente, no caso (3) (Figura 7.38), que semelhante ao caso
(3) da soluo (b) (Figura 7.32), o coeficiente K23 = 0.
O nico caso bsico da soluo (c) que no tem semelhante nas outras solues o
caso (2), mostrado na Figura 7.37. Observa-se nesse caso que no existe resistncia
do SH para a rotao D2 = 1 que imposta. Portanto, os coeficientes de rigidez
desse caso so nulos, assim como os momentos fletores (ou qualquer outro esforo
interno), pois as barras no tm deformao.
Caso (0) Solicitao externa (carregamento) isolada no SH
20
30
10
+45
0
0
M0
[kNm]
0
10 = + 45 kNm
20 = 0
30 = 10 kN
Figura 7.35 Caso (0) da estrutura da Figura 7.34.
Caso (1) Deslocabilidade D1 isolada no SH
K11
D1 = 1
K21
K31
+4EI/4
+3EI/6
0
0
M1
D1 = 1
6EI/42
+2EI/4
2EI/4
3EI/62
3EI/62
K11 = + 3EI/6 + 4EI/4
K21 = 0
K31 = + 6EI/42
Figura 7.36 Caso (1) da estrutura da Figura 7.34.
D1
258 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Caso (2) Deslocabilidade D2 isolada no SH
K22
0
K32
K12
D2 = 1
M2
D2 = 1
0
D2
D3
K12 = 0
K22 = 0
K32 = 0
Figura 7.37 Caso (2) da estrutura da Figura 7.34.
Caso (3) Deslocabilidade D3 isolada no SH
D3 = 1
K13
D3 = 1
K23
K33
+6EI/42
M3
12EI/43
3EI/43
6EI/42
+6EI/42
+3EI/42
3EI/42
K13 = + 6EI/42 + 0
K23 = 0
K33 = + 12EI/43 + 3EI/43
Figura 7.38 Caso (3) da estrutura da Figura 7.34.
Equaes de equilbrio
O sistema de equaes de equilbrio da soluo (c) indicado abaixo:
+ 45
32
0 + EI 0
10
3 8
0
0
0
3 8 D1 0
0 D2 = 0 .
15 64 D3 0
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 259
Observa-se que a matriz de rigidez global desse sistema de equaes singular
pois tem a segunda linha e a segunda coluna nulas. Isso quer dizer que esse sistema, pelo menos na forma como est apresentado, no tem soluo. Na verdade,
isso consistente com o fato da articulao estar sendo considerada de forma redundante.
Entretanto, se a segunda linha da equao for eliminada, bem como a influncia da
deslocabilidade D2 (eliminando a segunda coluna da matriz), isso resulta em um
sistema de equaes que tem soluo para D1 e D3:
D1 = 67 ,78 EI
.
D3 = + 151,06 EI
+ 45
3 2 3 8 D1 0
+ EI
=
10
3 8 15 64 D3 0
Nota-se que os valores de D1 e D3 so os mesmos obtidos nas solues (a) e (b). Os
momentos fletores (ou qualquer outro esforo interno ou reaes de apoio) tambm resultam nos mesmos valores obtidos nas outras solues. Tambm se observa que na soluo (c) a superposio envolve apenas trs casos: M = M0 + M1D1 +
M3D3.
Este justamente o macete de clculo: simplesmente desconsidera-se a deslocabilidade
interna de um n completamente articulado. Esta a terceira simplificao adotada
quando se resolve manualmente uma estrutura pelo mtodo dos deslocamentos.
Como visto na anlise desta seo, essa simplificao no modifica os resultados,
apenas deixa uma deslocabilidade interna indefinida.
Quando se adota essa simplificao, entretanto, devem-se tomar alguns cuidados.
Por exemplo, s se pode fazer a simplificao quando realmente todas as barras
que chegam no n tm as sees adjacentes articuladas. Por exemplo, a Figura 7.39
mostra um exemplo em que somente uma barra articulada em um n e um exemplo correspondente onde todas as barras so articuladas nesse n. Os SHs dos
dois casos esto tambm indicados na figura. No primeiro caso, a deslocabilidade
interna do n com articulao tem que ser considerada e, no segundo caso, essa
deslocabilidade pode ser eliminada.
(a)
2
5
(b)
SH
2
4
SH
Figura 7.39 Estrutura em que no se pode desconsiderar a rotao do n da articulao (a) e
estrutura em que a simplificao pode ser feita (b).
260 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Outro macete de clculo pode ser feito no caso de um apoio simples do 2 gnero
(apoio que fixa deslocamentos e libera a rotao) no qual converge apenas uma
barra. O truque consiste em interpretar a liberao da rotao como uma articulao da barra, considerando o apoio como um engaste. Isso exemplificado na
Figura 7.40. Dessa forma, elimina-se a deslocabilidade interna do n do apoio.
3
Interpretao
SH
Figura 7.40 Simplificao para o caso de apoio do 2 gnero no qual s converge uma barra.
Nos exemplos mostrados neste e no prximo captulo, essa interpretao estar
sendo feita implicitamente, sem que se desenhe o apoio como um engaste e a barra
articulada na extremidade do apoio. Entretanto, ser dessa forma que a barra estar sendo considerada.
Essa simplificao tambm deve ser usada com cuidado. A Figura 7.41 mostra um
exemplo em que duas barras convergem para um n com um apoio do 2 gnero,
sem que exista uma articulao. Nesse caso, o truque no possvel e a deslocabilidade interna do n do apoio deve ser considerada.
1
2
SH
3
Figura 7.41 Situao em que no possvel adotar a simplificao para apoio do 2 gnero.
7.3.3. Exemplo de soluo de prtico com duas articulaes
Esta seo mostra um exemplo de soluo de uma estrutura com barras inextensveis em que se adota a simplificao para ns completamente articulados. O modelo estrutural e sua soluo esto mostrados na Figura 7.42. Todas as barras tm
a mesma inrcia flexo EI, onde E o mdulo de elasticidade do material e I o
momento de inrcia da seo transversal das barras. Existe uma articulao interna e uma articulao externa (apoio do 2 gnero no qual converge apenas uma
barra). De acordo com a simplificao que foi introduzida na seo anterior, nos
dois ns correspondentes a essas articulaes as deslocabilidades internas no sero consideradas.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 261
Caso (0) Solicitao externa isolada no SH
Sistema Hipergeomtrico
10 = + 16 kNm
SH
16
124 / 2 = 24
20 = 39 kN
10
20
+16
0
0
M0
[kNm]
+20
0
104(5/8) = 25
Caso (2) Deslocabilidade D2 isolada no SH
Caso (1) Deslocabilidade D1 isolada no SH
6EI/42
2EI/4
K11 = +9EI/4
+2EI/4
K21 = 3EI/42
+4EI/4
K21
0
6EI/42
K22 = +18EI/43
D2 = 1
K11
K22
x D1
D1 = 1
+3EI/4
+3EI/6
6EI/42
12EI/43
K12 = 3EI/42
-6EI/42
K12 x D2
+3EI/42
M2
M1
0
+3EI/42
3EI/43
3EI/42
3EI/42
3EI/43
Equaes de equilbrio:
10 + K 11 D1 + K 12 D2 = 0
20 + K 21D1 + K 22 D2 = 0
+ 16 EI + 72 6 D1 0
=
+
9 D2 0
39 32 6
720
D1 = + 153 EI
21696
D2 = +
153 EI
Momentos Fletores Finais:
M = M 0 + M 1 D1 + M 2 D2
66.8
-66.8
24
-32.5
0
0
+2.4
2.4
M
20
[kNm]
+46.6
32.5
+30.1
30.1
M
[kNm]
0
46.6
Figura 7.42 Soluo de um prtico com uma articulao interna e outra externa.
262 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Na soluo mostrada na Figura 7.42, deve-se observar que o termo de carga 20 e os
coeficientes de rigidez K21 e K22 podem ser calculados de duas maneiras. Eles podem ser determinados pela soma dos esforos cortantes que atuam nas colunas no
nvel do pavimento ou podem ser calculados impondo-se o equilbrio global do SH
na direo horizontal ( Fx = 0).
Por exemplo, no caso (0) pela soma dos cortantes nas colunas no nvel do pavimento, 20 = 104(3/8) 124/2 = 39 kN. Pelo equilbrio global, deve-se considerar
todas as foras horizontais atuantes, inclusive as resultantes das cargas distribudas: Fx = 20 + 104 + 124 104(5/8) 124/2 = 0. Isso resulta no mesmo valor
para 20.
7.4. Considerao de barras infinitamente rgidas
O ltimo tipo de simplificao adotada para reduzir o nmero de deslocabilidades
na soluo de um prtico pelo Mtodo dos Deslocamentos a considerao de barras com rigidez infinita, isto , de barras que no tm nenhuma deformao. Essa
considerao no feita para todas as barras de um prtico e s faz sentido para
um caso especial de anlise simplificada do comportamento global do prtico.
Por exemplo, na anlise de um prdio para cargas laterais (de vento, por exemplo),
pode-se considerar que o conjunto de lajes e vigas de um pavimento do prdio
forma um diafragma rgido quando o prtico se desloca lateralmente. Em outras
palavras, em situaes especiais o pavimento pode ser considerado como um elemento infinitamente rgido em comparao com as colunas do prdio (elementos
estruturais que tm deformaes transversais por flexo).
Para entender como a considerao de pavimentos ou barras rgidas influencia a
determinao das deslocabilidades de um prtico, o exemplo da Figura 7.43 vai ser
analisado. Nesse prtico as colunas so inextensveis, com uma inrcia flexo EI
constante. A viga considerada como uma barra infinitamente rgida. A solicitao externa uma carga horizontal P atuando no pavimento rgido.
P
h
b
Figura 7.43 Prtico com uma viga infinitamente rgida.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 263
Considerando que as colunas do prtico da Figura 7.43 so inextensveis, os ns do
pavimento do prtico s podem se deslocar na direo horizontal. Isso impede a
rotao da viga como um corpo rgido. Portanto, o nico movimento que a viga
infinitamente rgida pode ter o deslocamento horizontal mostrado na Figura 7.44.
D1
D1
Figura 7.44 Configurao deformada da estrutura da Figura 7.43.
V-se na configurao deformada mostrada na Figura 7.44 que os ns do pavimento no sofrem rotaes pois a viga se desloca horizontalmente mantendo-se reta (
uma barra que no pode se deformar). Dessa forma, a estrutura s tem uma deslocabilidade, que o deslocamento horizontal D1 do pavimento.
Atravs dessa anlise pode-se avaliar como a considerao de barras infinitamente
rgidas influencia na reduo do nmero de deslocabilidades de um prtico. Se as
barras do prtico adotado como exemplo no tivessem nenhuma restrio quanto
s suas deformaes, o nmero total de deslocabilidades seria 6 (3 em cada n do
pavimento). Considerando as trs barras sem deformao axial, o nmero de deslocabilidades reduz para 3 (veja a Figura 7.5). Finalmente, com a considerao da
viga infinitamente rgida, o nmero de deslocabilidades se reduz a 1.
evidente que tanto a hiptese de barras inextensveis quanto a considerao de
barra com rigidez infinita modificam os resultados da soluo de um prtico
quando comparados com a soluo sem essas simplificaes. As restries nas deformaes de barras devem ser consideradas tendo com objetivo uma anlise simplificada, em geral relacionada com a resoluo manual de uma estrutura.
Outro ponto a ser considerado que a identificao das deslocabilidades de prticos com barras infinitamente rgidas s pode ser feita caso a caso. Muitas vezes
necessrio visualizar a priori (atravs de esboos, por exemplo) a configurao deformada de uma estrutura para identificar suas deslocabilidades. Seria muito difcil estabelecer regras a para determinao de deslocabilidades de prticos que tm
pelo menos uma barra rgida, tal como foi feito na Seo 7.2.2 para prticos com
apenas barras inextensveis.
Apesar disso, para prticos simples com poucas barras infinitamente rgidas, no
difcil identificar as deslocabilidades. Assim como para prticos s com barras inextensveis, a maneira mais simples de se determinar as deslocabilidades de um
prtico com barras inextensveis e rgidas introduzindo os apoios fictcios para a
criao do SH: a cada apoio necessrio para fixar os ns da estrutura identificada uma
264 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
deslocabilidade. Isso vai ser considerado nos exemplos que contm barras infinitamente rgidas deste captulo.
Voltando ao prtico da Figura 7.43, a sua soluo recai na superposio dos casos
(0) e (1) mostrados nas Figuras 7.45 e 7.46. O SH desse exemplo est mostrado na
Figura 7.45, onde s foi necessrio adicionar um apoio fictcio (o apoio 1) para fixar
a estrutura, podendo-se identificar dessa forma a deslocabilidade D1. Como os ns
superiores da estrutura no tm rotaes, no necessrio inserir chapas fictcias
(que fixam deslocabilidades internas) no SH.
Caso (0) Solicitao externa (carregamento) isolada no SH
P
10
SH
M0
10 = P
0
Figura 7.45 Sistema Hipergeomtrico (SH) e caso (0) da estrutura da Figura 7.43.
Caso (1) Deslocabilidade D1 isolada no SH
D1 = 1
6EI/h2
D1 = 1
6EI/h2
K11
+6EI/h2
12EI/h3
+6EI/h2
6EI/h2
M1
12EI/h3 +6EI/h2
12EI/h3 +6EI/h2
6EI/h2
6EI/h2
12EI/(h2b)
6EI/h2
12EI/(h2b)
K11 = +24EI/h3
6EI/h2
12EI/(h2b)
12EI/(h2b)
12EI/(h2b)
12EI/h3
12EI/(h2b)
6EI/h2
12EI/h3
12EI/h3
6EI/h2
12EI/(h2b)
12EI/h3 x D
1
12EI/h3
6EI/h2
12EI/(h2b)
Figura 7.46 Caso (1) da estrutura da Figura 7.43.
O fato de no existirem chapas fictcias no SH faz com que a determinao dos esforos nas barras no caso (1) (Figura 7.46) exija uma anlise mais detalhada. Como
sempre no Mtodo dos Deslocamentos, o ponto de partida para a soluo de cada
caso bsico a configurao deformada que imposta. Nesse caso, imposto um
deslocamento D1 = 1. As colunas do prtico so deformadas de tal maneira que h
um deslocamento transversal nos ns superiores, sem que eles girem. A viga se
desloca como um corpo rgido.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 265
Com base na configurao deformada das colunas no caso (1), os esforos cortantes
e momentos fletores nas suas extremidades so conhecidos (coeficientes de rigidez
de barra veja a Figura 4.30 do Captulo 4). Por outro lado, o fato da viga no ter
deformao por flexo no acarreta a condio de momentos fletores nulos. Assim
como para colunas inextensveis os esforos normais no so conhecidos a priori, os
momentos fletores na viga rgida tambm no podem ser determinados antecipadamente. De fato, a viga rgida pode ter qualquer distribuio para momentos fletores, j que ela sempre se mantm reta. Assim, os momentos fletores na viga rgida devem ser determinados para satisfazer o equilbrio da estrutura.
Isso pode ser entendido com base no isolamento das barras no caso (1), tal como
indicado na Figura 7.46. A viga rgida tem que ter momentos nas suas extremidades de forma a estabelecer o equilbrio de momentos nos ns superiores. Assim, os
sentidos dos momentos fletores que atuam nas sees da viga so sempre opostos
aos sentido dos momentos nas colunas. Utilizando a conveno de sinais do Mtodo dos Deslocamentos, os momentos fletores do diagrama M1 tm sinais positivos nas colunas e negativos na viga, resultando em um somatrio de momentos
nulos em cada n.
Essa anlise pode ser vista de uma outra maneira. A presena da viga rgida fez
com que no fosse necessrio inserir chapas fictcias no SH para impedir deslocabilidades internas. Ento, a viga rgida tem que fazer o papel das chapas fictcias.
Esse papel feito equilibrando os momentos fletores que atuam nas colunas para a
configurao deformada imposta.
O isolamento das barras na Figura 7.46 tambm mostra que devem aparecer esforos cortantes nas extremidades da viga rgida, que so transmitidos via esforo
normal nas colunas para os apoios da base.
A determinao do coeficiente de rigidez K11 pode ser feita de duas maneiras. Ele
pode ser obtido pela soma dos esforos cortantes no topo das colunas ou pelo equilbrio global de foras horizontais. De ambas as maneiras, o valor resultante K11 =
+24EI/h3.
Equao de equilbrio e determinao do diagrama de momentos fletores finais
Com base na superposio dos casos bsicos (0) e (1), estabelecido o equilbrio da
estrutura original. Isso feito obrigando o efeito final do apoio fictcio na estrutura
ser igual a zero:
10 + K 11D1 = 0
P + 24EI / h 3 D1 = 0 .
A soluo dessa equao de equilbrio resulta no valor da deslocabilidade da estrutura:
D1 = +
P h3
.
24EI
266 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Finalmente, o diagrama de momentos fletores, mostrado na Figura 7.47, obtido
com base na relao M = M0 + M1D1, onde nesse exemplo M0 = 0. interessante
observar que os valores dos momentos fletores independem da largura b do prtico.
Ph/4
Ph/4
+Ph/4
+Ph/4
Ph/4
Ph/4
M
+Ph/4
Ph/4
Ph/4
M
+Ph/4
Ph/4
Ph/4
Figura 7.47 Diagrama de momentos fletores da estrutura da Figura 7.43.
7.4.1. Exemplo de soluo de prtico com dois pavimentos
Esta seo analisa uma estrutura com dois pavimentos rgidos, mostrada na Figura
7.48. As colunas so inextensveis, com uma inrcia flexo EI constante.
Figura 7.48 Prtico com dois pavimentos rgidos.
Diferentes condies de articulao so consideradas para as colunas. A coluna do
segundo pavimento esquerda articulada no topo. No mesmo pavimento, a coluna da direita articulada na base. A coluna da esquerda no primeiro pavimento
considerada articulada na base (apoio do 2 gnero). A nica coluna que no tem
articulao a coluna do primeiro pavimento direita.
A soluo dessa estrutura pelo Mtodo dos Deslocamentos est mostrada na Figura 7.49. As nicas deslocabilidades so os deslocamentos horizontais D1 e D2 dos
dois pavimentos. Isso identificado pelos apoios fictcios 1 e 2 do SH, necessrios
para fixar os deslocamentos horizontais dos pavimentos. Como os ns da estrutura no tm deslocamentos verticais (colunas inextensveis) e as vigas so infinita-
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 267
mente rgidas, no so necessrios mais apoios para prender a estrutura. Portanto,
s existem duas deslocabilidades.
Caso (0) Solicitao externa isolada no SH
Sistema Hipergeomtrico
20
20 = 10 kN
SH
0
0
0
0
10
0
M0
10 = 10 kN
[kNm]
0
Caso (1) Deslocabilidade D1 isolada no SH
Caso (2) Deslocabilidade D2 isolada no SH
K21
3EI/62
M1
+3EI/62
M2
K11
x D1
K21 = 6EI/63
12EI/63
3EI/62
K22 = +6EI/63
6EI/62
Equaes de equilbrio:
10 + K 11 D1 + K 12 D2 = 0
20 + K 21 D1 + K 22 D2 = 0
288
D1 = + EI
648
D2 = +
EI
10 EI + 21 6 D1 0
+
=
10 216 6 + 6 D2 0
Momentos Fletores Finais:
M = M 0 + M 1 D1 + M 2 D2
30
30
30
+30
+30
+24
48
0
48
54
+48
24
30
54
48
[kNm]
+48
x D2
0
K12 = 6EI/63
+6EI/62
K22
D2 = 1
+3EI/62
+6EI/62
K11 = +21EI/63
3EI/63
+3EI/62
D1 = 1
6EI/62
3EI/62
+3EI/62
-3EI/62
[kNm]
48
Figura 7.49 Soluo da estrutura da Figura 7.48.
K12
268 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
Na soluo do prtico com dois pavimentos mostrada na Figura 7.49, observa-se
que no caso (0) os momentos fletores so nulos pois as colunas no tm deformaes nem cargas no seu interior. Nesse caso, as foras horizontais aplicadas so
transmitidas via esforo normal nas vigas rgidas diretamente para os apoios fictcios do SH. As reaes nos apoios fictcios so os termos de carga 10 e 20.
Nos casos (1) e (2), o ponto de partida so as deformaes conhecidas que so impostas para as colunas. Essas deformaes induzem momentos fletores e esforos
cortantes nas extremidades das colunas (coeficientes de rigidez de barras com e
sem articulao veja as Figuras 4.30, 4.32 e 4.34 do Captulo 4). Os momentos
fletores que aparecem nas extremidades das vigas rgidas so tais que equilibram
os momentos nas extremidades das colunas. Isto , os momentos fletores dos diagramas M1 e M2 que aparecem nas extremidades das vigas rgidas tm valores e
sinais que fazem com que o somatrio dos momentos em cada n seja nulo.
Os coeficientes de rigidez dessa estrutura (K11, K21, K12 e K22) correspondem aos esforos cortantes nas colunas em cada pavimento. Por exemplo, o coeficiente K11
calculado, no caso (1), pela soma dos cortantes nas extremidades das colunas no
primeiro pavimento: K11 = +3EI/62 + 3EI/62 + 3EI/62 + 12EI/62 = +21EI/62. No
mesmo caso, o coeficiente K21 obtido pela soma dos cortantes no topo das colunas
do segundo pavimento: K21 = 3EI/62 3EI/62 = 6EI/62. Para essa estrutura no
possvel determinar os coeficientes de rigidez impondo-se apenas o equilbrio global da estrutura na direo horizontal pois em cada caso existem duas incgnitas
para uma equao de equilbrio.
7.4.2. Exemplo de barra rgida com giro
Nos dois exemplos anteriores, as barras infinitamente rgidas sofriam um deslocamento horizontal sem rotao. Nesta seo considerado um prtico, mostrado na
Figura 7.50, que tem uma barra rgida que sofre um giro. Esse prtico tem a coluna
da esquerda considerada infinitamente rgida, sendo que a viga e a outra coluna
so flexveis (com inrcia flexo igual a EI) e inextensveis.
P
h
b
Figura 7.50 Prtico com uma coluna infinitamente rgida que sofre um giro.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 269
Como a coluna rgida da estrutura da Figura 7.50 est articulada na base (apoio do
2 gnero), existe a possibilidade dessa barra girar, tendo como centro de rotao o
ponto do apoio. Isso indicado na Figura 7.51, que mostra a nica configurao
deformada possvel para esse prtico. Como o ngulo entre a coluna rgida e a
viga no pode se alterar (ligao rgida sem articulao), o giro 1 da coluna induz
uma rotao igual na extremidade esquerda da viga.
D1
D1
1
1 = D1/h
Figura 7.51 Configurao deformada da estrutura da Figura 7.50.
Considerando que os deslocamentos so pequenos, o ngulo 1 pode ser aproximado pela sua tangente. Portanto, 1 = D1/h, sendo h o comprimento da coluna
rgida. Observa-se que um deslocamento D1 da esquerda para a direita induz uma
rotao 1 no sentido horrio.
A hiptese de pequenos deslocamentos tambm permite que se considere que o
movimento do n no topo da coluna rgida no tenha uma componente vertical.
Como a rotao 1 do n est associada ao seu deslocamento horizontal D1, s existe um parmetro que define o movimento do n. Portanto, esse n s tem uma
deslocabilidade. Pode-se adotar para esse parmetro tanto o deslocamento horizontal D1 quanto a rotao 1.
Nesse exemplo o deslocamento horizontal D1 foi adotado como deslocabilidade
pois tambm corresponde ao deslocamento horizontal do n superior direito. Como esse n tem uma articulao completa, a nica deslocabilidade resultante da
estrutura D1. A Figura 7.52 mostra o SH correspondente, onde somente o apoio
fictcio 1 necessrio para prender completamente a estrutura.
Caso (0) Solicitao externa (carregamento) isolada no SH
P
1
SH
10 = P
M0
0
10
Figura 7.52 Sistema Hipergeomtrico (SH) e caso (0) da estrutura da Figura 7.50.
270 Mtodos Bsicos da Anlise de Estruturas Luiz Fernando Martha
O caso (0) desse exemplo tambm est mostrado na Figura 7.52. Como as barras
flexveis no esto deformadas pois no tm carga no seu interior, no aparecem
momentos fletores nessas barras. Portanto, tambm no aparece momento fletor
na coluna rgida. A carga P aplicada transmitida via esforo na viga para o apoio
1 do SH, resultando no termo de carga 10 = P.
Caso (1) Deslocabilidade D1 isolada no SH
K11
D1 = 1
1
3EI/(bh)
+3EI/(bh)
M1
1 = 1/h
(3EI/b)1/b
(3EI/b)1
K11 = +3EI/(bh2) + 3EI/h3
(3EI/b)1/h
(3EI/b)1/h
(3EI/b)1/h
(3EI/b)1/b
D1
+3EI/h2
(3EI/b)1
(3EI/b)1/h
(3EI/b)1/b
(3EI/b)1/b
(3EI/b)1/b
3EI/h3
3EI/h3 3EI/h2
(3EI/b)1/b
Figura 7.53 Caso (1) da estrutura da Figura 7.50.
O caso (1) dessa soluo, mostrado na Figura 7.53, merece ateno especial. imposta uma configurao deformada tal que D1 = 1. Isso provoca uma rotao 1 =
1/h, no sentido horrio, na extremidade esquerda da viga. Com base nessa rotao
imposta viga, todos os esforos atuantes nas barras do SH ficam determinados no
caso (1).
Isso pode ser entendido analisando o equilbrio das barras isoladas, conforme mostrado na Figura 7.53. A rotao 1 imposta na extremidade esquerda da viga provoca um momento nessa extremidade igual a (3EI/b)1 no sentido horrio. No
diagrama M1, isso corresponde ao valor negativo 3EI/(bh) na seo esquerda da
viga. Para que haja equilbrio de momentos no n superior esquerdo, aparece um
momento fletor no topo da coluna rgida igual a +3EI/(bh). Os esforos cortantes
nas extremidades da viga e da coluna rgida so calculados de forma a equilibrar
essas barras. Portanto, esses esforos so sempre iguais em valores e com sentidos
opostos, formando conjugados que equilibram os momentos nas barras.
Luiz Fernando Martha Mtodo dos Deslocamentos com Restries nas Deformaes 271
Por outro lado, o momento fletor e os esforos cortantes nas extremidades da coluna flexvel da direita ficam determinados pela condio de deslocamento horizontal unitrio imposto no topo (veja os coeficientes de rigidez de barra com articulao mostrados na Figura 4.32 do Captulo 4).
Para completar o equilbrio das barras isoladas no caso (1) desse exemplo, necessrio determinar os esforos normais em todas as barras. Como indica a Figura
7.53, os esforos normais so determinados por ltimo, de forma a equilibrar os
esforos cortantes nas barras.
A Figura 7.53 tambm indica o valor do coeficiente de rigidez K11, que corresponde
soma dos esforos cortantes no topo das colunas.
Equao de equilbrio e determinao do diagrama de momentos fletores finais
Com base no termo de carga 10 e no coeficiente de rigidez K11, pode-se determinar
o valor da deslocabilidade D1, o que feito a partir da equao de equilbrio mostrada abaixo:
10 + K 11D1 = 0
3EI b + h
P + 3
D1 = 0
h b
D1 = +
P h3 b
.
3EI b + h
Finalmente, os momento fletores finais na estrutura podem ser determinados utilizando a superposio de efeitos M = M0 + M1D1, onde M0 = 0. O diagrama de
momentos fletores finais est mostrado na Figura 7.54.
Ph2/(b+h)
+Ph2/(b+h)
M
0
Ph2/(b+h)
Ph2/(b+h)
M
+P(bh)/(b+h)
P(bh)/(b+h)
Figura 7.54 Diagrama de momentos fletores da estrutura da Figura 7.50.
Você também pode gostar
- Trabalho de Madeira-Fabio DantasDocumento9 páginasTrabalho de Madeira-Fabio DantasFabio DantasAinda não há avaliações
- Modelo de GestãoDocumento0 páginaModelo de GestãolivroinglesAinda não há avaliações
- Tabela de LajesDocumento24 páginasTabela de LajesGeorge W. A. RangelAinda não há avaliações
- Desenhos de Formas Estruturais em Edifícios de C.ADocumento10 páginasDesenhos de Formas Estruturais em Edifícios de C.AheldioAinda não há avaliações
- Dimensionamento À Torção de Vigas de Concreto Armado - José Milton de Araujo PDFDocumento11 páginasDimensionamento À Torção de Vigas de Concreto Armado - José Milton de Araujo PDFFabio DantasAinda não há avaliações
- Associação de Resistores - ConteudoDocumento3 páginasAssociação de Resistores - ConteudoFabio DantasAinda não há avaliações
- TRABALHO DE RESISTENCIA II Rev2Documento6 páginasTRABALHO DE RESISTENCIA II Rev2garbazzaAinda não há avaliações
- Cálculo de Estrutura de Concreto Armado IDocumento42 páginasCálculo de Estrutura de Concreto Armado IguimeloAinda não há avaliações
- ARCOS Teoria Historico 2020 2Documento14 páginasARCOS Teoria Historico 2020 2Francine KoerichAinda não há avaliações
- 12 - 10 - 18 - Elementos de MaquinasDocumento218 páginas12 - 10 - 18 - Elementos de MaquinasADRIANOAinda não há avaliações
- Reforço de Estruturas de Concreto Com Chapas e Perfis de AçoDocumento24 páginasReforço de Estruturas de Concreto Com Chapas e Perfis de Açomateus456Ainda não há avaliações
- EixosDocumento14 páginasEixospriscilamoraissAinda não há avaliações
- Chust 2 V 1Documento590 páginasChust 2 V 1JUSSIANE NUNES DA PAIXAO SANTIAGOAinda não há avaliações
- Aula 2 - Propriedades Dos Elementos EstruturaisDocumento12 páginasAula 2 - Propriedades Dos Elementos Estruturaismarcele dos anjosAinda não há avaliações
- Capítulo 1 - Cargas Móveis em Estruturas Isostáticas - FinalDocumento160 páginasCapítulo 1 - Cargas Móveis em Estruturas Isostáticas - FinalJulia RazeraAinda não há avaliações
- Sobre o Dimensionamento de Perfis de Aço Formados A FrioDocumento127 páginasSobre o Dimensionamento de Perfis de Aço Formados A FrioLaila Monteiro A MeloAinda não há avaliações
- Estruturas Tubulares - Aula 01Documento133 páginasEstruturas Tubulares - Aula 01Alberto LealAinda não há avaliações
- Resumo Expandido Epcc 2023Documento5 páginasResumo Expandido Epcc 2023Igor EduardoAinda não há avaliações
- Vigas 1 - Diagramas de Esforços InternosDocumento7 páginasVigas 1 - Diagramas de Esforços InternosGabriela DamascenoAinda não há avaliações
- Resumo Prova 1Documento28 páginasResumo Prova 1Rick BernardiAinda não há avaliações
- Prof Me Silvia Maria Baptista Kalil Resistencia Dos Materiais II M PDFDocumento54 páginasProf Me Silvia Maria Baptista Kalil Resistencia Dos Materiais II M PDFTatumi SobueAinda não há avaliações
- Banco de Questes RES MAT IDocumento41 páginasBanco de Questes RES MAT IFelipe LimaAinda não há avaliações
- Aula 2. Solicitação AxialDocumento16 páginasAula 2. Solicitação AxialRodrigo TeixeiraAinda não há avaliações
- DuPont Top Ten Design TipsDocumento30 páginasDuPont Top Ten Design TipsEstefanie Schuster CristofoliniAinda não há avaliações
- Analise Dos Esforcos Atuantes em Um Galpao Metalico Devido A Acao Do VentoDocumento129 páginasAnalise Dos Esforcos Atuantes em Um Galpao Metalico Devido A Acao Do VentoLynniker MonteiroAinda não há avaliações
- FolhasApoioEB1 Unidade1Documento289 páginasFolhasApoioEB1 Unidade1Próspero Hazael Cunzuna MulazaAinda não há avaliações
- Análise Matricial de Estruturas ReticuladasDocumento55 páginasAnálise Matricial de Estruturas ReticuladasAndrew RichterAinda não há avaliações
- Elementos de Máquinas I - Aula Pinos e Chavetas - Eng Mecà NicaDocumento41 páginasElementos de Máquinas I - Aula Pinos e Chavetas - Eng Mecà Nicajorge_binottoAinda não há avaliações
- Concreto Armado PDFDocumento174 páginasConcreto Armado PDFLeticia Araujo100% (2)
- 04 - Analise EstruturalDocumento35 páginas04 - Analise EstruturalMaila PereiraAinda não há avaliações
- PontesDocumento9 páginasPontesJoão Carlos MoreiraAinda não há avaliações
- Aula 7 - Flexão Solidos1Documento101 páginasAula 7 - Flexão Solidos1Jacques OliveiraAinda não há avaliações
- MecSol B Programa Curso UFSCDocumento1 páginaMecSol B Programa Curso UFSCmurilo1764Ainda não há avaliações
- VeiosDocumento25 páginasVeioszesalgueiroAinda não há avaliações