Você também pode gostar
- Macros, Funções, Variáveis e Editor VBADocumento96 páginasMacros, Funções, Variáveis e Editor VBAgutraniAinda não há avaliações
- Quimica Do Dia A DiaDocumento5 páginasQuimica Do Dia A DiawggonzagaAinda não há avaliações
- Gab Sasi 1 Etapa 2016Documento32 páginasGab Sasi 1 Etapa 2016CesarAinda não há avaliações
- Agrupando e Concatenando No OracleDocumento1 páginaAgrupando e Concatenando No OraclewggonzagaAinda não há avaliações
- Azure e Inteligencia ArtificialDocumento345 páginasAzure e Inteligencia Artificialwggonzaga100% (1)
- O Dicionário de Dados ORACLEDocumento3 páginasO Dicionário de Dados ORACLEwggonzagaAinda não há avaliações
- Ensine Seus Filhos A ProgramarDocumento12 páginasEnsine Seus Filhos A ProgramarwggonzagaAinda não há avaliações
- Estudo CDocumento44 páginasEstudo CwggonzagaAinda não há avaliações
- Genetica EMBRAPADocumento59 páginasGenetica EMBRAPAcecmat20088186Ainda não há avaliações
- An Com Livro PDFDocumento276 páginasAn Com Livro PDFGilvan SampaioAinda não há avaliações
- Oracle - Substituindo Subqueries Por FuncoesDocumento6 páginasOracle - Substituindo Subqueries Por FuncoeswggonzagaAinda não há avaliações
- Questões sobre tirinha e texto sobre migrações e debates contemporâneosDocumento34 páginasQuestões sobre tirinha e texto sobre migrações e debates contemporâneosJoaoAinda não há avaliações
- Oracle SQL Tuning - Quando Ocorre Um Full Table Scan OTIMO ARTIGODocumento12 páginasOracle SQL Tuning - Quando Ocorre Um Full Table Scan OTIMO ARTIGOwggonzagaAinda não há avaliações
- Esquema Didático Do Jiu JitsuDocumento1 páginaEsquema Didático Do Jiu JitsuwggonzagaAinda não há avaliações
- CBJJ técnicas faixasDocumento0 páginaCBJJ técnicas faixasEdu KrugelAinda não há avaliações
- Curso Custos e Formacao de PrecosDocumento129 páginasCurso Custos e Formacao de PrecosAmanda Santos - D'MandocaAinda não há avaliações
- Opsianie Swiata PDFDocumento11 páginasOpsianie Swiata PDFwggonzagaAinda não há avaliações
- Oracle - Funcoes de Grupo para Converter Multiplas Linhas em Uma Unica LinhaDocumento5 páginasOracle - Funcoes de Grupo para Converter Multiplas Linhas em Uma Unica LinhawggonzagaAinda não há avaliações
- Arte Gótica: Vitrais, Esculturas e Arquitetura ImponenteDocumento3 páginasArte Gótica: Vitrais, Esculturas e Arquitetura ImponenteRodrigo Cristiano AlvesAinda não há avaliações
- Fisica 3 ParteDocumento1 páginaFisica 3 PartewggonzagaAinda não há avaliações
- Glossario Dividendos Vacas Leiteiras PDFDocumento1 páginaGlossario Dividendos Vacas Leiteiras PDFwggonzagaAinda não há avaliações
- Fis 8-9 Ano Fund 2012Documento5 páginasFis 8-9 Ano Fund 2012wggonzagaAinda não há avaliações
- Inteligencia CompetitivaDocumento93 páginasInteligencia CompetitivawggonzagaAinda não há avaliações
- Robô busca saída em labirinto 10x10Documento9 páginasRobô busca saída em labirinto 10x10wggonzagaAinda não há avaliações
- 007 15 Guia Pratico Do Cidadao Online 1 PDFDocumento19 páginas007 15 Guia Pratico Do Cidadao Online 1 PDFandresdelmondesAinda não há avaliações
- SQL Ruim É A Causa Número 1 de Problemas de PerformanceDocumento1 páginaSQL Ruim É A Causa Número 1 de Problemas de PerformancewggonzagaAinda não há avaliações
- LabirintoslidesDocumento10 páginasLabirintoslideswggonzagaAinda não há avaliações
- Os 10 Livros Que Realmente Impactaram A Minha Vida2Documento2 páginasOs 10 Livros Que Realmente Impactaram A Minha Vida2Fabio Miguel RodriguesAinda não há avaliações
- As Cláusulas ROLLUPDocumento12 páginasAs Cláusulas ROLLUPwggonzagaAinda não há avaliações
- Lista Magias D&D 5E MAGODocumento33 páginasLista Magias D&D 5E MAGOPedro Faria XavierAinda não há avaliações
- Síndrome do chicote: revisão sobre lesão por aceleração cervicalDocumento5 páginasSíndrome do chicote: revisão sobre lesão por aceleração cervicalCatarina DiasAinda não há avaliações
- 3 ObjetivaDocumento4 páginas3 ObjetivaViviane Araujo50% (2)
- Engenharia e inovação: compartilhando experiênciasDocumento40 páginasEngenharia e inovação: compartilhando experiênciasFabiano AlvesAinda não há avaliações
- A Vida de Uma Princesa Árabe Revela a Opressão das MulheresDocumento144 páginasA Vida de Uma Princesa Árabe Revela a Opressão das MulheresMarcos Bezerra da CostaAinda não há avaliações
- Fibra Tipo 3Documento5 páginasFibra Tipo 3Edimilson LanaAinda não há avaliações
- Bpo - 2291-2291-1-PBDocumento18 páginasBpo - 2291-2291-1-PBalesorianoAinda não há avaliações
- Receção de HotelDocumento117 páginasReceção de HotelBrielSilcaAinda não há avaliações
- Itens HAMP Exportado 22-01-2019 10-46-53 872Documento5 páginasItens HAMP Exportado 22-01-2019 10-46-53 872Senhor FanáticoAinda não há avaliações
- Inquerito - PFDocumento10 páginasInquerito - PFliscappiAinda não há avaliações
- Plano de Educação Ambiental para Trabalhadores - Rev01Documento7 páginasPlano de Educação Ambiental para Trabalhadores - Rev01smsengemon jequieAinda não há avaliações
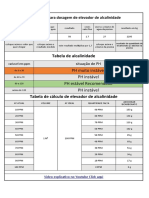
- Tabela de AlcalinidadeDocumento1 páginaTabela de AlcalinidadeedsonAinda não há avaliações
- CatalogoDocumento72 páginasCatalogoQue torcida é essa.Ainda não há avaliações
- Ap3 Pesquisa Mercadologica Uninta - Passei DiretoDocumento11 páginasAp3 Pesquisa Mercadologica Uninta - Passei DiretoFelipe LimaAinda não há avaliações
- A concepção durkheimiana da regulação moral da economiaDocumento20 páginasA concepção durkheimiana da regulação moral da economiaMatheus CostaAinda não há avaliações
- Curso de Fotografia Digital: 40 HorasDocumento35 páginasCurso de Fotografia Digital: 40 HorasAdriana Britto100% (1)
- Diagnóstico dos 5 Ps da estratégia em empresa de usinagemDocumento3 páginasDiagnóstico dos 5 Ps da estratégia em empresa de usinagemJoão Paulo G. SilveiraAinda não há avaliações
- Portugal - Marcas de Contrast Aria e de ResponsabilidadeDocumento3 páginasPortugal - Marcas de Contrast Aria e de ResponsabilidadeClara RamosAinda não há avaliações
- A AMIZADE É MAGICA MODULO OP VFINAL - Por Onze#6904Documento27 páginasA AMIZADE É MAGICA MODULO OP VFINAL - Por Onze#6904Thecla CoronataAinda não há avaliações
- Ficha Tecnica - Disjuntor Caixa Moldada Eletronico Dle250 HDocumento2 páginasFicha Tecnica - Disjuntor Caixa Moldada Eletronico Dle250 HAlex BozzAinda não há avaliações
- SimposioANPEPP 2008Documento178 páginasSimposioANPEPP 2008Hábilis Augusto BiazottoAinda não há avaliações
- Procedimento Operacional Padrão: TituloDocumento7 páginasProcedimento Operacional Padrão: TituloDeyvid OliveiraAinda não há avaliações
- CO MUELLER - Bomba KSB 050-032-250 - Folha de DadosDocumento6 páginasCO MUELLER - Bomba KSB 050-032-250 - Folha de DadosmarceloAinda não há avaliações
- Introdução À Metodologiade Investigação Científica: Jerónimo LangaDocumento32 páginasIntrodução À Metodologiade Investigação Científica: Jerónimo Langaosvaldo panguanaAinda não há avaliações
- Manual do Aluno Village Park DogDocumento4 páginasManual do Aluno Village Park DogSadm SorocabaAinda não há avaliações
- O banco mais vantajoso: a esmolaDocumento65 páginasO banco mais vantajoso: a esmolaParistomas Reports CenterAinda não há avaliações
- Abordagem metodológica para problemas complexos em planos diretores hospitalaresDocumento40 páginasAbordagem metodológica para problemas complexos em planos diretores hospitalaresJeffrey HaithAinda não há avaliações
- Regulamenta acautelamento de material bélico SEAPDocumento26 páginasRegulamenta acautelamento de material bélico SEAPfaelcassioAinda não há avaliações
- NBR14040 10Documento9 páginasNBR14040 10EduardoCPinheiroAinda não há avaliações
- Growth suplementos pagamentoDocumento1 páginaGrowth suplementos pagamentoEu sou o pai do YOUTUBEAinda não há avaliações