Você também pode gostar
- Trab FinalDocumento3 páginasTrab FinalalexAinda não há avaliações
- Lista ExerciciosDocumento14 páginasLista ExerciciosalexAinda não há avaliações
- Teoria Geral Dos SistemasDocumento3 páginasTeoria Geral Dos SistemasalexAinda não há avaliações
- Revista Educação Pública - A Utilização Dos Mapas Conceituais Como Ferramenta Didática Nas Licenciaturas de Física e Matemática Do CederjDocumento7 páginasRevista Educação Pública - A Utilização Dos Mapas Conceituais Como Ferramenta Didática Nas Licenciaturas de Física e Matemática Do CederjalexAinda não há avaliações
- Teoria Geral Dos SistemasDocumento3 páginasTeoria Geral Dos SistemasalexAinda não há avaliações
- Sika Protecção Betão - 03.223Documento3 páginasSika Protecção Betão - 03.223FilipeBaptistaAinda não há avaliações
- Zen Catalogo Mancais de Alternador e Motor de Partida 2019Documento118 páginasZen Catalogo Mancais de Alternador e Motor de Partida 2019LEODECIO BELO DE OLIVEIRA100% (1)
- Apresentação - Mancais para RolamentosDocumento34 páginasApresentação - Mancais para RolamentosPricyla ChwistAinda não há avaliações
- Wilo Sistemas de Bombagem 2009-03-30Documento252 páginasWilo Sistemas de Bombagem 2009-03-30CavamogoAinda não há avaliações
- Ricardo Barbosa PDDocumento84 páginasRicardo Barbosa PDCleide FernandesAinda não há avaliações
- HEPATECTOMIADocumento34 páginasHEPATECTOMIAFernando ZatAinda não há avaliações
- Atividade Cultura Brasileira 1 TEXTOSDocumento1 páginaAtividade Cultura Brasileira 1 TEXTOSRafael FrancoAinda não há avaliações
- Cantos para A Quaresma 2024Documento5 páginasCantos para A Quaresma 2024Keven RogerAinda não há avaliações
- Manutenção Eletrica Geral 17.07.2022Documento30 páginasManutenção Eletrica Geral 17.07.2022Nayara NascimentoAinda não há avaliações
- Periodização e Planejamento No JudôDocumento33 páginasPeriodização e Planejamento No JudôAdfda Fdfdf86% (7)
- Catecismo de Nossa Senhora PDFDocumento52 páginasCatecismo de Nossa Senhora PDFEvelyn Affonso100% (1)
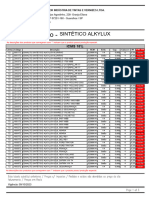
- Alkylux - ICMS 18Documento3 páginasAlkylux - ICMS 18Kenidi BiazottoAinda não há avaliações
- A Rosa Do Povo - Resumo e AnaliseDocumento10 páginasA Rosa Do Povo - Resumo e AnaliseAssencleves L. de AraújoAinda não há avaliações
- 1 A Historia Do PiDocumento12 páginas1 A Historia Do PialdobrasilAinda não há avaliações
- Espaços Motores de Fluxos Mundiais (12.º)Documento10 páginasEspaços Motores de Fluxos Mundiais (12.º)profgeofernando100% (2)
- A Lei de PembaDocumento6 páginasA Lei de PembaSergio Nabais100% (1)
- ExercíciosDocumento52 páginasExercíciosEvani Santos100% (1)
- ANÁLISE DAS ESTRUTURAS I - Aula 2 AE1Documento30 páginasANÁLISE DAS ESTRUTURAS I - Aula 2 AE1José RobertoAinda não há avaliações
- Acentuação GráficaDocumento3 páginasAcentuação GráficaAdrianaAinda não há avaliações
- A Corrente Humanista e A Corrente TranspessoalDocumento49 páginasA Corrente Humanista e A Corrente TranspessoalWanderlei GCAinda não há avaliações
- Contos 2Documento19 páginasContos 2IturalAinda não há avaliações
- Bergeret (1998) Psicologia Patolà Gica (Caps Sobre As Estruturas)Documento45 páginasBergeret (1998) Psicologia Patolà Gica (Caps Sobre As Estruturas)Daisy IvyAinda não há avaliações
- PIEPER Josef - Que e FilosofarDocumento35 páginasPIEPER Josef - Que e FilosofarMarcmelo100% (3)
- BR 09644539Documento194 páginasBR 09644539Bruno VenturaAinda não há avaliações
- Apostila Mariologia - Pe. João Paulo VelosoDocumento25 páginasApostila Mariologia - Pe. João Paulo VelosoTarcisio Augusto100% (1)
- Guia Ouvidores de VozesDocumento27 páginasGuia Ouvidores de VozesAna Paula SerranoAinda não há avaliações
- Levedo de Cerveja - Benefícios e Onde Comprar em Promoção!Documento1 páginaLevedo de Cerveja - Benefícios e Onde Comprar em Promoção!L.A OliveiraAinda não há avaliações
- Lista de Exercicios 1 - ÍNDICES FÍSICOS 2016.1Documento3 páginasLista de Exercicios 1 - ÍNDICES FÍSICOS 2016.1Vilobaldo Oliveira100% (1)
- 06 Caixas de AreiaDocumento11 páginas06 Caixas de AreiafaustomafrafilhoAinda não há avaliações