Você também pode gostar
- Pasta 1Documento14 páginasPasta 1Rosi DutraAinda não há avaliações
- Avaliação de Gestão de Qualidade e ProdutividadeDocumento3 páginasAvaliação de Gestão de Qualidade e ProdutividadeRegina MarquesAinda não há avaliações
- 30 Palavras em Espanhol Que Enganam Os Brasileiros!Documento14 páginas30 Palavras em Espanhol Que Enganam Os Brasileiros!Elone Izata SampaioAinda não há avaliações
- GB Prova PreparatóriaDocumento7 páginasGB Prova PreparatórialeohenriquecostaAinda não há avaliações
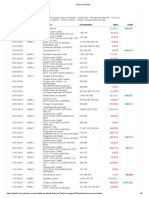
- SISBB - Sistema de Informações Banco Do Brasil - 23/03/2020 - Autoatendimento BB - 20:18:23 Agência: 3069-4 Conta: 27060-1 ClienteDocumento3 páginasSISBB - Sistema de Informações Banco Do Brasil - 23/03/2020 - Autoatendimento BB - 20:18:23 Agência: 3069-4 Conta: 27060-1 ClienteDomínio FrancaAinda não há avaliações
- Matemática na Educação 1 - Avaliação a Distância 2 - 2019.1Documento4 páginasMatemática na Educação 1 - Avaliação a Distância 2 - 2019.1Jessica Moreira100% (2)
- Classificação das contas contábeisDocumento3 páginasClassificação das contas contábeisWELLINGTON MARQUESAinda não há avaliações
- Contrato cessão direitos imóvelDocumento3 páginasContrato cessão direitos imóvelPablo RuanAinda não há avaliações
- Componentes Fisicos Uma Rede Aula 3Documento25 páginasComponentes Fisicos Uma Rede Aula 3Eurico RodriguesAinda não há avaliações
- Resumo de Direito Constitucional para 1 Fase OABDocumento12 páginasResumo de Direito Constitucional para 1 Fase OABMarconi De Morais Provazzi100% (1)
- Controle de poços: estudo de casos de perda de controleDocumento95 páginasControle de poços: estudo de casos de perda de controleElrohirPendragonAinda não há avaliações
- Exercícios de mecânica dos fluidos e hidráulicaDocumento3 páginasExercícios de mecânica dos fluidos e hidráulicaMatheusGrieblerAinda não há avaliações
- COMO CHEGAR A ACORDOS SEM CONCESSÕESDocumento25 páginasCOMO CHEGAR A ACORDOS SEM CONCESSÕESGuta BiazzettoAinda não há avaliações
- PPRA Supermercado GiganteDocumento21 páginasPPRA Supermercado Giganteedson de sousa parente jrAinda não há avaliações
- Normas ABNT para execução de estruturas de concretoDocumento3 páginasNormas ABNT para execução de estruturas de concretoSaulo JohnsonAinda não há avaliações
- Apostila Fabricacao de Acucar 2012 2Documento9 páginasApostila Fabricacao de Acucar 2012 2Roberto Corazza DolciAinda não há avaliações
- AP3 Met Est I 2022-2 - GABARITODocumento5 páginasAP3 Met Est I 2022-2 - GABARITOcintiaAinda não há avaliações
- Edital ALCE Técnico Legislativo 2020Documento2 páginasEdital ALCE Técnico Legislativo 2020Regis da SilvaAinda não há avaliações
- EC380D L Volvo valve specificationsDocumento2 páginasEC380D L Volvo valve specificationspaulo100% (1)
- Ligas Ferrosas: Aços e seus Elementos de LigaDocumento86 páginasLigas Ferrosas: Aços e seus Elementos de LigaEltonAinda não há avaliações
- NBR 5681 PDFDocumento6 páginasNBR 5681 PDFDébora Bretas100% (1)
- Infocus In2x Userguide PTDocumento8 páginasInfocus In2x Userguide PTGeorge TenorioAinda não há avaliações
- Monografia - Desafios Da Gestão Escolar Nas Escolas Públicas.Documento36 páginasMonografia - Desafios Da Gestão Escolar Nas Escolas Públicas.Alê Wenderson Brum100% (1)
- 7/8" Cellflex Premium - Atenuação de Baixa Perda - Cabo Coaxial - PE ExpansoDocumento1 página7/8" Cellflex Premium - Atenuação de Baixa Perda - Cabo Coaxial - PE ExpansoRaphael PioAinda não há avaliações
- Pedido 1064Documento1 páginaPedido 1064Diego CarlosAinda não há avaliações
- UltimoDocumento1 páginaUltimoJorge Rafael AbreuAinda não há avaliações
- Astrologia HerméticaDocumento7 páginasAstrologia HerméticaAle PassarelliAinda não há avaliações
- Recepção, preparo e moagem da cana-de-açúcarDocumento99 páginasRecepção, preparo e moagem da cana-de-açúcarwl_santos100% (1)
- Conversores AD e DADocumento44 páginasConversores AD e DAand_car_ribAinda não há avaliações
- Doubleway 3F 380 Dwtt10a2 - Dwtt80a2Documento78 páginasDoubleway 3F 380 Dwtt10a2 - Dwtt80a2Janaína da Silva dos Santos100% (1)
- Eletricista Residencial E PredialNo EverandEletricista Residencial E PredialNota: 3 de 5 estrelas3/5 (1)
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNo EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNota: 4 de 5 estrelas4/5 (4)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Neurociência aplicada a técnicas de estudos: Técnicas práticas para estudar de forma eficienteNo EverandNeurociência aplicada a técnicas de estudos: Técnicas práticas para estudar de forma eficienteNota: 4.5 de 5 estrelas4.5/5 (15)
- Motores automotivos: evolução, manutenção e tendênciasNo EverandMotores automotivos: evolução, manutenção e tendênciasNota: 5 de 5 estrelas5/5 (1)
- Arquitetura de software distribuído: Boas práticas para um mundo de microsserviçosNo EverandArquitetura de software distribuído: Boas práticas para um mundo de microsserviçosAinda não há avaliações