Você também pode gostar
- Apostila - Rede de Computadores PDFDocumento30 páginasApostila - Rede de Computadores PDFFabiana Nonaka Ferraz100% (1)
- Projeto Integrado Síntese - Tecnologia Da Informação Meu NomeDocumento15 páginasProjeto Integrado Síntese - Tecnologia Da Informação Meu NomeDanielAinda não há avaliações
- Ufcd7846 ManualDocumento47 páginasUfcd7846 ManualElizabete Chapouto100% (1)
- Projetos Com Esp32 Programado Em Arduino - Parte IiNo EverandProjetos Com Esp32 Programado Em Arduino - Parte IiAinda não há avaliações
- Formação 2020Documento47 páginasFormação 2020ruismbgmailcomAinda não há avaliações
- Projeto Integrado I 2022Documento19 páginasProjeto Integrado I 2022maria100% (1)
- Teste Dos Principais Componentes Do MicroondasDocumento10 páginasTeste Dos Principais Componentes Do MicroondasAndréNeves100% (1)
- Injeção Eletronica - Curso BásicoDocumento109 páginasInjeção Eletronica - Curso Básicojrbc8589100% (3)
- Supervisorio ArduinoDocumento20 páginasSupervisorio ArduinoOliveira RodriguesAinda não há avaliações
- Eletrônica: UnidadeDocumento28 páginasEletrônica: UnidadeEdson Leandro100% (1)
- Sistemas EmbarcadosDocumento36 páginasSistemas EmbarcadosAndersonPereiraAinda não há avaliações
- Manual Formella 7846 ArDocumento77 páginasManual Formella 7846 ArCarlos GomesAinda não há avaliações
- Manual 0828Documento10 páginasManual 0828Mike AlisterAinda não há avaliações
- Manual UFCD 7847 Aplicações Informáticas Na Ótica Do UtilizadorDocumento29 páginasManual UFCD 7847 Aplicações Informáticas Na Ótica Do UtilizadorTiago100% (1)
- 1-Conceitos de Comunicação em RedeDocumento21 páginas1-Conceitos de Comunicação em RedeAllison Vitor AmaranteAinda não há avaliações
- Sistema Embarcados TrabalhoDocumento15 páginasSistema Embarcados TrabalhoAmante De plugAinda não há avaliações
- Laudo Basico TrabaDocumento19 páginasLaudo Basico TrabaEng Marcel Miguel AyoubAinda não há avaliações
- Manual 0828 1Documento27 páginasManual 0828 1Mike AlisterAinda não há avaliações
- Plc-Curso Slc500 Allen Bradley RockwellDocumento156 páginasPlc-Curso Slc500 Allen Bradley Rockwellmarcroch100% (2)
- Implementação de Um Controlador PID Digital Com Acesso Remoto Utilizando Tecnologia EthernetDocumento54 páginasImplementação de Um Controlador PID Digital Com Acesso Remoto Utilizando Tecnologia Ethernetsapolino123Ainda não há avaliações
- Treinamento Hipath 3800Documento76 páginasTreinamento Hipath 3800Frederico Ferreira GoisAinda não há avaliações
- Microcontrolador MbedDocumento20 páginasMicrocontrolador MbedJefferson AmaráAinda não há avaliações
- Protocolo I2CDocumento7 páginasProtocolo I2CamaralfassAinda não há avaliações
- Projeto ConceitualDocumento14 páginasProjeto ConceitualLarissa MeirelesAinda não há avaliações
- Microcontroladores 5º - Uma - 2022-2023 - Cap.1 - Introdução - V3Documento65 páginasMicrocontroladores 5º - Uma - 2022-2023 - Cap.1 - Introdução - V3Ndozi Rosário MiguelAinda não há avaliações
- Sistemas Embebidos para IoTDocumento48 páginasSistemas Embebidos para IoTJaime Barragan100% (1)
- C - Artigo - Uma Soluã Ã o Com Arduino para Controlar e Monitorar Processos IndustriaisDocumento4 páginasC - Artigo - Uma Soluã Ã o Com Arduino para Controlar e Monitorar Processos IndustriaisRonny TelesAinda não há avaliações
- TCC - Uma Solução Com Arduino para Controlar e Monitorar Processos IndustriaisDocumento4 páginasTCC - Uma Solução Com Arduino para Controlar e Monitorar Processos IndustriaisadrianoampAinda não há avaliações
- 1 - Introdução 'A InformáticaDocumento27 páginas1 - Introdução 'A Informáticadario capetaAinda não há avaliações
- UFCD 7846 - ManualDocumento47 páginasUFCD 7846 - Manualtdias84Ainda não há avaliações
- Capítulo 1 - ARQUITECTURA DE COMPUTADORES (MICRONTROLADORES)Documento21 páginasCapítulo 1 - ARQUITECTURA DE COMPUTADORES (MICRONTROLADORES)cedrick mansoniAinda não há avaliações
- ATPS - Organização de ComputadoresDocumento106 páginasATPS - Organização de Computadoreswilliansilvabarros100% (2)
- Aula 1 - MicrocontroladoresDocumento39 páginasAula 1 - MicrocontroladoresMaximiano MartinsAinda não há avaliações
- Introdução 'A Informática Imetro-1Documento42 páginasIntrodução 'A Informática Imetro-1eduardo estevãoAinda não há avaliações
- Aula 2 - MicrocontroladoresDocumento52 páginasAula 2 - MicrocontroladoresMaximiano MartinsAinda não há avaliações
- Sistema EmbarcadoDocumento10 páginasSistema EmbarcadoAssane Mussa AlantaraAinda não há avaliações
- Relatório de Redes Industrial - Laboratório 1: Engenharia ElétricaDocumento17 páginasRelatório de Redes Industrial - Laboratório 1: Engenharia ElétricaCAROLINE CIELLOAinda não há avaliações
- Trabalho de Microprocessadores - Kiala MárioDocumento28 páginasTrabalho de Microprocessadores - Kiala MárioKiala MárioAinda não há avaliações
- Projeto Integrado 1 SemestreDocumento12 páginasProjeto Integrado 1 Semestrejy5qrnnrgzAinda não há avaliações
- Recalculando A Rota PF, PRF e PCDF - 01.04 - Fabricio MeloDocumento52 páginasRecalculando A Rota PF, PRF e PCDF - 01.04 - Fabricio MeloPedro GirondiAinda não há avaliações
- CLP Vs MicrocontroladorDocumento2 páginasCLP Vs MicrocontroladorSamuel Nogueira FigueiredoAinda não há avaliações
- Microcontrolador WikiDocumento2 páginasMicrocontrolador WikiKelison LuizAinda não há avaliações
- Sistemas Microcontrolados - Aula02 - 2024 - 1Documento21 páginasSistemas Microcontrolados - Aula02 - 2024 - 1Anderson VilacaAinda não há avaliações
- Artigo - Integração Entre Arduino e Matlab - Sistema de AquecimentoDocumento34 páginasArtigo - Integração Entre Arduino e Matlab - Sistema de AquecimentoRaissaCurty100% (3)
- Avaliação de Redes IndustriaisDocumento3 páginasAvaliação de Redes IndustriaisreverthoncratoAinda não há avaliações
- Microcontroladores - Introdução A TelematicaDocumento10 páginasMicrocontroladores - Introdução A TelematicaAleksander simpleAinda não há avaliações
- Sistemas OperacionaisDocumento31 páginasSistemas OperacionaisFrancisco Antunes100% (1)
- Utilização Da Tecnologia Iot para Construção de Um Protótipo de Sistema de Segurança Baseado Na Fechadura de ImpDocumento7 páginasUtilização Da Tecnologia Iot para Construção de Um Protótipo de Sistema de Segurança Baseado Na Fechadura de ImpSamuel Sherman MinariniAinda não há avaliações
- AULA 01 SE Introdução Historia-1 PDFDocumento30 páginasAULA 01 SE Introdução Historia-1 PDFMatheus Daniel FlorianoAinda não há avaliações
- Introducao WPS OfficeDocumento2 páginasIntroducao WPS OfficeNelson Ananias ChauAinda não há avaliações
- Avaliao - Do - Aprendizado - 2022.1 - 2 - José Rodrigues Do Nascimento Neto PDFDocumento3 páginasAvaliao - Do - Aprendizado - 2022.1 - 2 - José Rodrigues Do Nascimento Neto PDFJOSE NETOAinda não há avaliações
- DM 813 Desenho - MecaDocumento94 páginasDM 813 Desenho - MecaIsaque SilvaAinda não há avaliações
- Implementando Em Visual Basic Via Rs232 Modbus Master-slave Com Base No Stm32f103c8 Programado Em ArduinoNo EverandImplementando Em Visual Basic Via Rs232 Modbus Master-slave Com Base No Stm32f103c8 Programado Em ArduinoAinda não há avaliações
- Microcontroladores 2 GeneralidadesDocumento10 páginasMicrocontroladores 2 GeneralidadesPablo RodasAinda não há avaliações
- TCC Eng Mecanica4.0Documento14 páginasTCC Eng Mecanica4.0Renato FilhoAinda não há avaliações
- 20 Introduction To SDN and NFV - En.ptDocumento51 páginas20 Introduction To SDN and NFV - En.ptLaurindo CarinhasAinda não há avaliações
- MANUAL+Do+Cap+4+Emerson+OliveiraDocumento8 páginasMANUAL+Do+Cap+4+Emerson+OliveiraPablo RodrigoAinda não há avaliações
- 07 DriversDocumento46 páginas07 DriversAlexsandro AlvesAinda não há avaliações
- Projeto Integrado 3Documento11 páginasProjeto Integrado 3rcrfm2017Ainda não há avaliações
- Implementando Em Visual C++ Via Rs232 Modbus Master-slave Com Base No Stm32f103c8 Programado Em ArduinoNo EverandImplementando Em Visual C++ Via Rs232 Modbus Master-slave Com Base No Stm32f103c8 Programado Em ArduinoAinda não há avaliações
- Apostila Micro Do Gustavo WeberDocumento34 páginasApostila Micro Do Gustavo WeberAlcy Monteiro JrAinda não há avaliações
- Isso M SmoDocumento22 páginasIsso M Smoleo.gomes242424Ainda não há avaliações
- Implementando Em Visual Basic Via Rs232 Modbus Master-slave Com Base No Esp32 Programado Em ArduinoNo EverandImplementando Em Visual Basic Via Rs232 Modbus Master-slave Com Base No Esp32 Programado Em ArduinoAinda não há avaliações
- Capítulo 3 - ARQUITECTURA DE COMPUTADORES (MICRONTROLADORES)Documento21 páginasCapítulo 3 - ARQUITECTURA DE COMPUTADORES (MICRONTROLADORES)Edgar DanielAinda não há avaliações
- Implementando Em Visual C++ Via Rs232 Modbus Master-slave Com Base No Esp32 Programado Em ArduinoNo EverandImplementando Em Visual C++ Via Rs232 Modbus Master-slave Com Base No Esp32 Programado Em ArduinoAinda não há avaliações
- ET ABS 3G SSU 160628 PTDocumento4 páginasET ABS 3G SSU 160628 PTAlexandre Winck RamosAinda não há avaliações
- ExperimentoCircuitosTransistores (NATHALY, LEO, YUKI)Documento6 páginasExperimentoCircuitosTransistores (NATHALY, LEO, YUKI)NATHALY DOS SANTOS MENDESAinda não há avaliações
- CatalogoDocumento96 páginasCatalogogugagalvaoAinda não há avaliações
- FiltrosDocumento9 páginasFiltrosMurilo ArmelinAinda não há avaliações
- 9E UserManual EN Final4.en - PTDocumento40 páginas9E UserManual EN Final4.en - PTDenis SilvaAinda não há avaliações
- Codigos Secretos NokiaDocumento2 páginasCodigos Secretos NokialeancessAinda não há avaliações
- ABB - Disjuntores 10-2006-1 PDFDocumento53 páginasABB - Disjuntores 10-2006-1 PDFEdilbertoMarraAinda não há avaliações
- Aula 05-Cespe-Redes-e-Internet (1) EXPONENCIALDocumento120 páginasAula 05-Cespe-Redes-e-Internet (1) EXPONENCIALRAFAEL FERRAZ COUTINHOAinda não há avaliações
- Manual - Do - Usuário - Corp 8000 - Português-1Documento111 páginasManual - Do - Usuário - Corp 8000 - Português-1Cleber GomesAinda não há avaliações
- Amplificador de InstrumentaçãoDocumento5 páginasAmplificador de Instrumentaçãojotajota1112Ainda não há avaliações
- Gravador de BiosDocumento11 páginasGravador de BiosNaldo SilvaAinda não há avaliações
- Manual Nutron NT 824Documento89 páginasManual Nutron NT 824jccoelhoAinda não há avaliações
- Redes e Telecom - (RJ) - Pós-Graduação Do InatelDocumento4 páginasRedes e Telecom - (RJ) - Pós-Graduação Do InatelMarcelo Renato FilhoAinda não há avaliações
- Manutenção e Reparos em CelularesDocumento25 páginasManutenção e Reparos em CelularesRafael SenaAinda não há avaliações
- Cap.3 - Transístores de Potência PDFDocumento45 páginasCap.3 - Transístores de Potência PDFPedro Paulo Rocha MartinsAinda não há avaliações
- Apostila Freio Eletrônico CCBII BasicoDocumento93 páginasApostila Freio Eletrônico CCBII BasicoThiago RodriguesAinda não há avaliações
- RD986S 2021Documento6 páginasRD986S 2021Carlos SaldanhaAinda não há avaliações
- Ficha de Configuração Dos Instrumentos E Equipamentos Instalados Na AeronaveDocumento2 páginasFicha de Configuração Dos Instrumentos E Equipamentos Instalados Na AeronaveMarcus DragoAinda não há avaliações
- Conceitos Básicos de RS485 e RS422Documento7 páginasConceitos Básicos de RS485 e RS422gilsonrochaandAinda não há avaliações
- Manual de Normas e Praticas de Engenharia PDFDocumento52 páginasManual de Normas e Praticas de Engenharia PDFAlberto HertzAinda não há avaliações
- 50 Exercícios Redes TCPIP OSI UDP para ResolverDocumento20 páginas50 Exercícios Redes TCPIP OSI UDP para ResolverTscherly KleberAinda não há avaliações
- RT 220Documento48 páginasRT 220Erlon Alex da Guia Silva Da GuiaAinda não há avaliações
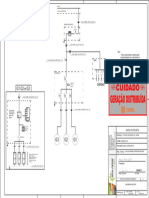
- Diagrama Unifilar Copel - ROQUE JORGE BARTHDocumento1 páginaDiagrama Unifilar Copel - ROQUE JORGE BARTHkayan.galvani30Ainda não há avaliações
- Topologia LógicaDocumento22 páginasTopologia LógicajonatasdamicoAinda não há avaliações
- Descrição Do InversorDocumento3 páginasDescrição Do Inversorwindisor MassenaAinda não há avaliações