Você também pode gostar
- Algoritmos sobre GrafosDocumento119 páginasAlgoritmos sobre GrafosckriqueAinda não há avaliações
- A04 Rerepsentacao de Grafos 0Documento19 páginasA04 Rerepsentacao de Grafos 0Salustiano Rodrigues OliveiraAinda não há avaliações
- Análise de Algoritmos e Teoria dos GrafosDocumento177 páginasAnálise de Algoritmos e Teoria dos GrafospaulohdpiresAinda não há avaliações
- Teoria Dos GrafosDocumento157 páginasTeoria Dos Grafossonny100% (2)
- Algoritmos em GrafosDocumento38 páginasAlgoritmos em GrafosRoni Cesar de CastroAinda não há avaliações
- Algoritmos em Grafos - Cap.7Documento28 páginasAlgoritmos em Grafos - Cap.7Regivaldo PereiraAinda não há avaliações
- Teoria Dos GrafosDocumento157 páginasTeoria Dos GrafosMauricio BarrosAinda não há avaliações
- Conceitos GrafosDocumento31 páginasConceitos GrafosKarina MartinsAinda não há avaliações
- AED2 08 Grafos PDFDocumento81 páginasAED2 08 Grafos PDFLevi RodriguesAinda não há avaliações
- Teoria Dos Grafos: Prof. Dr. Paulo SchroederDocumento29 páginasTeoria Dos Grafos: Prof. Dr. Paulo SchroederCassio GainettAinda não há avaliações
- Cap4 Ficha Grafos1Documento4 páginasCap4 Ficha Grafos1Gabriell SatAinda não há avaliações
- 5 EstruturaDocumento31 páginas5 EstruturaAlineAinda não há avaliações
- Aula 2 Conceitos BaÌ Sicos GrafosDocumento26 páginasAula 2 Conceitos BaÌ Sicos Grafospb85544d7qAinda não há avaliações
- Lista02_Grafos_2022_2GabaritoDocumento7 páginasLista02_Grafos_2022_2GabaritoSH1T- HE4DAinda não há avaliações
- Análise de Algoritmos DigrafosDocumento4 páginasAnálise de Algoritmos Digrafosmarcelo cobiasAinda não há avaliações
- Aula 07 - Notas de Aula - Tipos Avançados de GrafosDocumento12 páginasAula 07 - Notas de Aula - Tipos Avançados de GrafosAndré FilipeAinda não há avaliações
- Teoria Dos GrafosDocumento32 páginasTeoria Dos GrafosCarlos AraujoAinda não há avaliações
- Lista de Exercícios - Teoria dos Grafos resume de forma concisa e otimizada para o conteúdo do documento, destacando os principais pontos (Lista de Exercícios e Teoria dos GrafosDocumento9 páginasLista de Exercícios - Teoria dos Grafos resume de forma concisa e otimizada para o conteúdo do documento, destacando os principais pontos (Lista de Exercícios e Teoria dos GrafosLaercio Mendes Fabianne MendesAinda não há avaliações
- Alg2 Lista1Documento4 páginasAlg2 Lista1Salustiano Rodrigues OliveiraAinda não há avaliações
- Aula 14Documento48 páginasAula 14EDUARDO CALVOSO NAKAGUMA FUZIYAMAAinda não há avaliações
- Conceitos Basicos em Teoria Dos GrafosDocumento13 páginasConceitos Basicos em Teoria Dos GrafosAntonio Fernando NavarroAinda não há avaliações
- Teoria Dos Grafos - Grafos IndividuaisDocumento157 páginasTeoria Dos Grafos - Grafos IndividuaisluishenriquesferreirAinda não há avaliações
- Graficos AleatoriosDocumento61 páginasGraficos AleatoriosAntonio CarlosAinda não há avaliações
- Introdução aos Grafos AleatóriosDocumento61 páginasIntrodução aos Grafos AleatóriosDaniel TeixeiraAinda não há avaliações
- TG GabaritoDocumento13 páginasTG GabaritodeyvisonAinda não há avaliações
- TG Gabarito 2Documento13 páginasTG Gabarito 2Tatiana Coelho100% (1)
- Teoria Dos Grafos para ComputacaoDocumento149 páginasTeoria Dos Grafos para ComputacaoGabriel PehlsAinda não há avaliações
- Detecção de Componentes Bi-ConexosDocumento22 páginasDetecção de Componentes Bi-ConexosRubem FigueredoAinda não há avaliações
- Teoria Dos Grafos para ComputacaoDocumento149 páginasTeoria Dos Grafos para ComputacaoAndrews RicardoAinda não há avaliações
- Grafos e Árvores: Representação e TerminologiaDocumento13 páginasGrafos e Árvores: Representação e TerminologiaCésar Ferreira0% (1)
- O TDA Grafo e seus algoritmos de percursoDocumento90 páginasO TDA Grafo e seus algoritmos de percursoVasco SantosAinda não há avaliações
- Teoria Dos Grafos - Wikipédia, A Enciclopédia LivreDocumento8 páginasTeoria Dos Grafos - Wikipédia, A Enciclopédia LivreJeferson NaconeskiAinda não há avaliações
- Lista de Exercícios sobre Grafos com 15 TópicosDocumento3 páginasLista de Exercícios sobre Grafos com 15 TópicosHeloisio LimaAinda não há avaliações
- UNINTER - Estrutura de dados - 6Documento31 páginasUNINTER - Estrutura de dados - 6Danilo MeloAinda não há avaliações
- 06 Grafos Parte 1Documento38 páginas06 Grafos Parte 1ROGINALDO FERNANDO DOS REISAinda não há avaliações
- Aula 05Documento17 páginasAula 05António GasparAinda não há avaliações
- Grafos BipartidosDocumento7 páginasGrafos Bipartidosad0001Ainda não há avaliações
- Pierre Brémaud Auth. An Introduction To Probabilistic ModelingDocumento61 páginasPierre Brémaud Auth. An Introduction To Probabilistic ModelingFranklinn Franklin FfranklinAinda não há avaliações
- Teoria dos GrafosDocumento9 páginasTeoria dos GrafosLucas SousaAinda não há avaliações
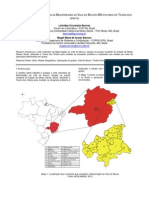
- Estudo Da Rede Rodoviária Da Mesorregião Do Vale Do Mucuri-Mg Por Meio de Teoria Dos GrafosDocumento6 páginasEstudo Da Rede Rodoviária Da Mesorregião Do Vale Do Mucuri-Mg Por Meio de Teoria Dos GrafosNatalia OliveiraAinda não há avaliações
- Grafos - Conceito e AplicaçõesDocumento34 páginasGrafos - Conceito e AplicaçõesAngelo OliveiraAinda não há avaliações
- Grafos e suas representaçõesDocumento32 páginasGrafos e suas representaçõesGabriel MandarinoAinda não há avaliações
- If969 - Grafos: IntroduçãoDocumento40 páginasIf969 - Grafos: IntroduçãoVinicius Cardoso Garcia100% (1)
- CONCEITOS BÁSICOS DE GRAFOSDocumento105 páginasCONCEITOS BÁSICOS DE GRAFOSGuilherme VieiraAinda não há avaliações
- Folha 5Documento4 páginasFolha 5octaviosilva3Ainda não há avaliações
- TCC JaciaraDocumento54 páginasTCC JaciaraNilvanyAinda não há avaliações
- MD LE9 SolucaoDocumento15 páginasMD LE9 SolucaoMihaelAinda não há avaliações
- Cap 3Documento32 páginasCap 3Duarte NevesAinda não há avaliações
- 06 GrafosDocumento105 páginas06 GrafosMatheus PimentelAinda não há avaliações
- ALGORITMOS EM GRAFOS-plano de AulaDocumento7 páginasALGORITMOS EM GRAFOS-plano de Aulakamilly amancioAinda não há avaliações
- Modelagem de sólidos, curvas e superfícies: representação poliédrica e estrutura de dados winged-edgeDocumento97 páginasModelagem de sólidos, curvas e superfícies: representação poliédrica e estrutura de dados winged-edgeArtur Barjonas JojoAinda não há avaliações
- Gabarito Teoria Dos GrafosDocumento6 páginasGabarito Teoria Dos GrafosJúlia BettencourtAinda não há avaliações
- Algoritmos em Grafos - Representação ComputacionalDocumento9 páginasAlgoritmos em Grafos - Representação ComputacionalvinivstAinda não há avaliações
- Lista Teoria GrafosDocumento16 páginasLista Teoria GrafosAna Clara AraujoAinda não há avaliações
- 08b - Revisão GrafosDocumento66 páginas08b - Revisão GrafosCida GuimarãesAinda não há avaliações
- Matemática Discreta - IfDocumento25 páginasMatemática Discreta - IfMarcosDaCostaSarraAinda não há avaliações
- Notas de Aula - Aulas 01 e 02 - GrafosDocumento15 páginasNotas de Aula - Aulas 01 e 02 - GrafosMatheus Rocha GaspariniAinda não há avaliações
- Interrup CoesDocumento9 páginasInterrup CoesBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Prova 1 2021 2Documento1 páginaProva 1 2021 2BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Prova 1 2022 2 REPDocumento1 páginaProva 1 2022 2 REPBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Sistemas de Tempo Real - Apresentacao Da DisciplinaDocumento11 páginasSistemas de Tempo Real - Apresentacao Da DisciplinaBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Petri BDocumento8 páginasPetri BBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Reposicoes 2022 1Documento4 páginasReposicoes 2022 1BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Prova 3 REP 2021 2Documento2 páginasProva 3 REP 2021 2BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Prova 2 2020 2Documento2 páginasProva 2 2020 2BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Prova 2 2021 1Documento2 páginasProva 2 2021 1BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Prova 2 2021 1Documento2 páginasProva 2 2021 1BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Solutions Resolução Lathi 2ed Sinais e Sistemas Lineares Passei Direto2Documento10 páginasSolutions Resolução Lathi 2ed Sinais e Sistemas Lineares Passei Direto2BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Prova 1 2021 2Documento1 páginaProva 1 2021 2BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Atividades Da Terceira Avaliao - ECPDocumento1 páginaAtividades Da Terceira Avaliao - ECPBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Prova 3 REP 2021 2Documento2 páginasProva 3 REP 2021 2BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Linguagens Regulares e Autômatos FinitosDocumento34 páginasLinguagens Regulares e Autômatos FinitosBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Prova 2 2022 2Documento2 páginasProva 2 2022 2BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Solutions Resolução Lathi 2ed Sinais e Sistemas Lineares Passei Direto3Documento10 páginasSolutions Resolução Lathi 2ed Sinais e Sistemas Lineares Passei Direto3BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Cap03 - Profa MorgannaDocumento84 páginasCap03 - Profa MorgannaBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Gabarito definitivo processo seletivo analista TI UFUDocumento1 páginaGabarito definitivo processo seletivo analista TI UFUBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Solutions Resolução Lathi 2ed Sinais e Sistemas Lineares Passei Direto1Documento10 páginasSolutions Resolução Lathi 2ed Sinais e Sistemas Lineares Passei Direto1BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Caminhos mínimos com uma fonte em grafosDocumento52 páginasCaminhos mínimos com uma fonte em grafosBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- UFMA Redes Computadores Camada FísicaDocumento114 páginasUFMA Redes Computadores Camada FísicaBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Orientações TCC 2022.2Documento2 páginasOrientações TCC 2022.2BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- PP12022 2Documento1 páginaPP12022 2BRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Programação lógica e PrologDocumento47 páginasProgramação lógica e PrologBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- 2017 1 TCC Perfil de Dureza e Composicao Quimica Da Solda e Regioes Afetadas Pela Solda Aluminotermica de TrilhosDocumento83 páginas2017 1 TCC Perfil de Dureza e Composicao Quimica Da Solda e Regioes Afetadas Pela Solda Aluminotermica de TrilhosBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Lista PrologDocumento2 páginasLista PrologBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Esmerilhamento Robotizado Da Parte Inferior Do Patim No Processo de Soldagem de Trilhos LongosDocumento3 páginasEsmerilhamento Robotizado Da Parte Inferior Do Patim No Processo de Soldagem de Trilhos LongosBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Estudos Sobre A Tecnologia Prática Dos Trilhos Longos SoldadosDocumento39 páginasEstudos Sobre A Tecnologia Prática Dos Trilhos Longos SoldadosBRUNO JOSE PEREIRA DE SAAinda não há avaliações
- Contrato TráfegoDocumento3 páginasContrato TráfegoRichard MeiraAinda não há avaliações
- Curso Jesuíta ConimbricenseDocumento292 páginasCurso Jesuíta ConimbricenseHelena Pinela100% (1)
- Ficha 4 DR2 Leguminosas STC6Documento3 páginasFicha 4 DR2 Leguminosas STC6Isabel HenriquesAinda não há avaliações
- Manual Operacao Printpoint IIDocumento20 páginasManual Operacao Printpoint IIArnaldoCostaAinda não há avaliações
- Tagmar Criticas e SugestõesDocumento15 páginasTagmar Criticas e SugestõesEduardo EwertonAinda não há avaliações
- Teoria da imputação objetiva: risco permitidoDocumento2 páginasTeoria da imputação objetiva: risco permitidoElói Ferreira PereiraAinda não há avaliações
- Mapa Porto Velho PDFDocumento8 páginasMapa Porto Velho PDFealmeida4213Ainda não há avaliações
- Nossos Desafios de EvoluçãoDocumento16 páginasNossos Desafios de EvoluçãoJuliana da SilvaAinda não há avaliações
- Manual GRTA-2DDocumento30 páginasManual GRTA-2DGmeyer equipamentosAinda não há avaliações
- AULA 2 - ORGANIZANDO IDEIAS-Estudo Orientado - 2023Documento15 páginasAULA 2 - ORGANIZANDO IDEIAS-Estudo Orientado - 2023WELINGTON Juarez TávoraAinda não há avaliações
- Soror Metal Thelema e As Projecoes PsicologicasDocumento6 páginasSoror Metal Thelema e As Projecoes Psicologicasajm418Ainda não há avaliações
- Apostila SEED HistóriaDocumento400 páginasApostila SEED HistóriaCadernos EJA100% (9)
- Visão empresarial sobre o mercado de sementesDocumento100 páginasVisão empresarial sobre o mercado de sementesIsmael NeuAinda não há avaliações
- AV2 - Desenvolvimento Pessoal e TrabalhabilidadeDocumento7 páginasAV2 - Desenvolvimento Pessoal e TrabalhabilidadeGiulia BarbosaAinda não há avaliações
- O liberalismo brasileiro segundo Marco Aurélio NogueiraDocumento8 páginasO liberalismo brasileiro segundo Marco Aurélio NogueiraRenaldo Mazaro Jr.Ainda não há avaliações
- PROJETO DE VIDA - Aula 1 - Eu-Meus Amigos e o MundoDocumento4 páginasPROJETO DE VIDA - Aula 1 - Eu-Meus Amigos e o MundoSayo Bernardino Monfradini100% (1)
- Pentatônica - O Que ÉDocumento3 páginasPentatônica - O Que ÉNivaldo OliveiraAinda não há avaliações
- 3 - (Consumo de Chocolate) - Ensino MédioDocumento3 páginas3 - (Consumo de Chocolate) - Ensino MédioFrank InácioAinda não há avaliações
- O Quadro Legal para Turismo Edicao II 2014 PTDocumento100 páginasO Quadro Legal para Turismo Edicao II 2014 PTFelisbeloAinda não há avaliações
- Aula 3 - Equilbrio de Uma Partcula OkDocumento23 páginasAula 3 - Equilbrio de Uma Partcula Okmilton macahdoAinda não há avaliações
- Advérbios em 40Documento3 páginasAdvérbios em 40dturmapelAinda não há avaliações
- Referencial Tecnicoa Administrativoa Competencias Profissionais - RVCCDocumento16 páginasReferencial Tecnicoa Administrativoa Competencias Profissionais - RVCCCarmen SantosAinda não há avaliações
- Gerenciamento de ProcessosDocumento90 páginasGerenciamento de ProcessosGerisval Alves Pessoa100% (6)
- Apresentacao Arquitectura 2022 EmailDocumento61 páginasApresentacao Arquitectura 2022 EmailBruna SerralheiroAinda não há avaliações
- Apostila Estatística Mat Vol 2 2008Documento23 páginasApostila Estatística Mat Vol 2 2008anon-92473100% (2)
- Semiologia Do Locomotor EquinoDocumento6 páginasSemiologia Do Locomotor EquinoLyah LamarckAinda não há avaliações
- Ficha PerfilDocumento4 páginasFicha Perfilcintia.limaAinda não há avaliações
- Relatório Aula Pratica EnsilagemDocumento6 páginasRelatório Aula Pratica EnsilagemPollyanna RosaAinda não há avaliações
- Modelagem Avançadas de Peças - Solidworks 2015 Training PDFDocumento457 páginasModelagem Avançadas de Peças - Solidworks 2015 Training PDFrogerio fiorentiniAinda não há avaliações
- Recursos digitais para Físico-QuímicaDocumento6 páginasRecursos digitais para Físico-QuímicaDiana MirandaAinda não há avaliações