Fazer download em pdf ou txt
Você também pode gostar
- Manual Sino Sds6Documento144 páginasManual Sino Sds6Sergioaranha92% (13)
- Teste Do Capítulo 8 - Attempt ReviewDocumento1 páginaTeste Do Capítulo 8 - Attempt ReviewIgor MonteiroAinda não há avaliações
- IF10 - Manual - Português - Ref. 4-003-1.1Documento20 páginasIF10 - Manual - Português - Ref. 4-003-1.1Aymar PenedoAinda não há avaliações
- Aula 02 - Programação de CLP - Linguagem LadderDocumento44 páginasAula 02 - Programação de CLP - Linguagem LadderPedro VieiraAinda não há avaliações
- Básico de Troubleshooting em RoteadoresDocumento45 páginasBásico de Troubleshooting em RoteadoresMaster22Ainda não há avaliações
- Descritivos Técnicos Dos Lotes 5 A 9 PDFDocumento266 páginasDescritivos Técnicos Dos Lotes 5 A 9 PDFJair ArmandoAinda não há avaliações
- DatasheetDocumento29 páginasDatasheetclaudio francaAinda não há avaliações
- Aula 6 ArduinoDocumento20 páginasAula 6 ArduinoJoão JuniorAinda não há avaliações
- Cartilha Do Arduino Ed1Documento23 páginasCartilha Do Arduino Ed1Luciano TenorioAinda não há avaliações
- CartilhadoArduino Ed1Documento23 páginasCartilhadoArduino Ed1Allan DennisAinda não há avaliações
- Microcontroladores Aula 3 FunçõesDocumento10 páginasMicrocontroladores Aula 3 Funçõesmarcos andré da silvaAinda não há avaliações
- Microcontroladores Aula 2 ProgramandoDocumento10 páginasMicrocontroladores Aula 2 Programandomarcos andré da silvaAinda não há avaliações
- 07 Operações Binárias e DigitaisDocumento26 páginas07 Operações Binárias e DigitaisTiago José de CamposAinda não há avaliações
- Esp32 ProgramaçaoDocumento53 páginasEsp32 ProgramaçaochristtianoribeiroAinda não há avaliações
- Apostila Arduino Nas EletivasDocumento7 páginasApostila Arduino Nas EletivasMario PauloAinda não há avaliações
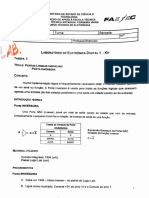
- Apostila 3 Lab. Eletrônica DigitalDocumento3 páginasApostila 3 Lab. Eletrônica DigitalUrco PollAinda não há avaliações
- Aula 06 Portas DigitaisDocumento23 páginasAula 06 Portas DigitaisdeiveramboAinda não há avaliações
- Manual Novus 1100 PDFDocumento10 páginasManual Novus 1100 PDFPaulo BorgesAinda não há avaliações
- AB - Aula 4 PDFDocumento13 páginasAB - Aula 4 PDFPaulo Celestino de LimaAinda não há avaliações
- Aula 2 - Apresentação CLP PDFDocumento25 páginasAula 2 - Apresentação CLP PDFRonan Lima100% (1)
- Funtion2 VHDL - SdaDocumento3 páginasFuntion2 VHDL - SdaFelipe AragaoAinda não há avaliações
- ArduHack 83 86Documento4 páginasArduHack 83 86Fabiano.BSGIAinda não há avaliações
- 4 Resumo Aula Introducao Ao ArduinoDocumento15 páginas4 Resumo Aula Introducao Ao ArduinoLóide ChivamboAinda não há avaliações
- Aula 03Documento66 páginasAula 03Bruno VescoviAinda não há avaliações
- Manual n2000 v30x F PortuguêsDocumento11 páginasManual n2000 v30x F PortuguêsDanielrcruzAinda não há avaliações
- N3000 - ManualDocumento11 páginasN3000 - ManualRobertAinda não há avaliações
- Iniciação Ao ArduinoDocumento38 páginasIniciação Ao ArduinocmcolivaresAinda não há avaliações
- Autómato Programável ZEN - E-BookDocumento21 páginasAutómato Programável ZEN - E-BookcmcolivaresAinda não há avaliações
- Robótica: Flávio Luiz Puhl JuniorDocumento17 páginasRobótica: Flávio Luiz Puhl JuniorDiego MeiraAinda não há avaliações
- Arduino Reference em Portugues PDFDocumento63 páginasArduino Reference em Portugues PDFDiogo Faria LimaAinda não há avaliações
- Aula 4 - ArduinoDocumento82 páginasAula 4 - ArduinoRamon FelipeAinda não há avaliações
- Comandos de ArduinoDocumento3 páginasComandos de ArduinorogerioktaAinda não há avaliações
- Inversor - IF10Documento16 páginasInversor - IF10Valdemir da silvaAinda não há avaliações
- Guia Simplificado de Operação Seletor de Funções - Rev. 0Documento2 páginasGuia Simplificado de Operação Seletor de Funções - Rev. 0manutencao ihnsdAinda não há avaliações
- Manual n120 v20x G PTDocumento14 páginasManual n120 v20x G PTRier AssistenciaAinda não há avaliações
- Indicador de Posição TAP ITELDocumento2 páginasIndicador de Posição TAP ITELMilson Ramos Dos SantosAinda não há avaliações
- Aula Slide Boa Programação-em-Arduino-módulo AjusteDocumento96 páginasAula Slide Boa Programação-em-Arduino-módulo AjusteRanildo LopesAinda não há avaliações
- Resumão ArduínoDocumento2 páginasResumão ArduínoIrineu DoidãoAinda não há avaliações
- Tema 3Documento50 páginasTema 3Alexander PaesAinda não há avaliações
- Manual n1020 v11x G PortuguêsDocumento8 páginasManual n1020 v11x G PortuguêsShotter RackerAinda não há avaliações
- Manual n1100 v40x K PTDocumento11 páginasManual n1100 v40x K PTLeninAinda não há avaliações
- Apresentação EcostruxureDocumento28 páginasApresentação EcostruxureLucas Q.de OliveiraAinda não há avaliações
- Pid ArduinoDocumento37 páginasPid ArduinoIago Henrique100% (1)
- Microcontrolador Prototipagem ArduinoDocumento49 páginasMicrocontrolador Prototipagem ArduinoRudnei BarbosaAinda não há avaliações
- Manual n2000 v30x L PTDocumento11 páginasManual n2000 v30x L PTflorisvaldo.silvaAinda não há avaliações
- Protocolo de Comunicação n1040 v20x C PTDocumento5 páginasProtocolo de Comunicação n1040 v20x C PTRodrigo Rodrigues de BarrosAinda não há avaliações
- Inversor IF-10 MetaltexDocumento25 páginasInversor IF-10 Metaltexisao chinen50% (4)
- Aula 15 - FunçõesDocumento18 páginasAula 15 - FunçõesLucas MoreiraAinda não há avaliações
- Manual de Oper e Param N 2000Documento10 páginasManual de Oper e Param N 2000Roberto TufikAinda não há avaliações
- DM 6000Documento3 páginasDM 6000gabryelribeiroAinda não há avaliações
- Inversor de Frequência: Manual de OperaçãoDocumento24 páginasInversor de Frequência: Manual de OperaçãoRaoni PintoAinda não há avaliações
- Guia Arduino - Rev1 - Felipe - CrispimDocumento14 páginasGuia Arduino - Rev1 - Felipe - CrispimRenatoAinda não há avaliações
- 3 Arduino Adc LDRDocumento4 páginas3 Arduino Adc LDRThauana KalfelsAinda não há avaliações
- Arduino AuçaDocumento6 páginasArduino AuçaLuís (ルィス)Ainda não há avaliações
- Sistemas Microcontrolados 1Documento11 páginasSistemas Microcontrolados 1Lilian De Figueiredo CarneiroAinda não há avaliações
- CDE - A9. Conversores AD - DaDocumento45 páginasCDE - A9. Conversores AD - DaCharles NatividadeAinda não há avaliações
- ARDUINO - Cartilha para Programação em CDocumento23 páginasARDUINO - Cartilha para Programação em CJoão Alexandre Silveira100% (3)
- C MicrocontroladoresDocumento34 páginasC MicrocontroladoresZola Victor LavicAinda não há avaliações
- Programando O Arduino Com A Função Do Circuito Integrado 4049No EverandProgramando O Arduino Com A Função Do Circuito Integrado 4049Ainda não há avaliações
- Programando O Arduino Com A Função Do Circuito Integrado 4511No EverandProgramando O Arduino Com A Função Do Circuito Integrado 4511Ainda não há avaliações
- Programando O Arduino Com A Função Do Circuito Integrado 7408No EverandProgramando O Arduino Com A Função Do Circuito Integrado 7408Ainda não há avaliações
- Programando O Arduino Com A Função Do Circuito Integrado 74133No EverandProgramando O Arduino Com A Função Do Circuito Integrado 74133Ainda não há avaliações
- Programando O Arduino Com A Função Do Circuito Integrado 4081No EverandProgramando O Arduino Com A Função Do Circuito Integrado 4081Ainda não há avaliações
- Aprenda A Criar Sua Página Empresarial Do Facebook PDFDocumento47 páginasAprenda A Criar Sua Página Empresarial Do Facebook PDFCarlãoeTamires AlvesAinda não há avaliações
- Definição Das Sete Camadas Do Modelo OSI e Explicação de Suas Funçõe1Documento143 páginasDefinição Das Sete Camadas Do Modelo OSI e Explicação de Suas Funçõe1Felipe DanielAinda não há avaliações
- CLX 3185FW Manual Portuguese BrazilianDocumento164 páginasCLX 3185FW Manual Portuguese BrazilianFernando José França de AndradeAinda não há avaliações
- cx69 (Terminal de Operacao Cimrex 69)Documento7 páginascx69 (Terminal de Operacao Cimrex 69)jefryspAinda não há avaliações
- AirLive WL-1700USB Manual PortuguesDocumento19 páginasAirLive WL-1700USB Manual PortuguesMZZXAinda não há avaliações
- Artigo Completo Sobre Aterramento Elétrico - AllnecDocumento46 páginasArtigo Completo Sobre Aterramento Elétrico - AllnecMarcos ResalAinda não há avaliações
- Redes Sociais São Estruturas Formadas Dentro Ou Fora Da InternetDocumento4 páginasRedes Sociais São Estruturas Formadas Dentro Ou Fora Da InternetLuis Filipe CerqueiraAinda não há avaliações
- Configurando Uma Conexão Modem-Roteador Com Um RoteadorDocumento2 páginasConfigurando Uma Conexão Modem-Roteador Com Um RoteadorILHEUBAIANOAinda não há avaliações
- Lista CanaisDocumento212 páginasLista CanaisRoberto GiménezAinda não há avaliações
- Quadripolos H7 PDFDocumento83 páginasQuadripolos H7 PDFRaniel GarciaAinda não há avaliações
- Microsoft Power Point - Modelo OsiDocumento58 páginasMicrosoft Power Point - Modelo OsiOdair JoséAinda não há avaliações
- Topologias de RedesDocumento13 páginasTopologias de Redesapi-3837694Ainda não há avaliações
- Vraptor4 Do ZeroDocumento7 páginasVraptor4 Do ZeroRichard WilsonAinda não há avaliações
- Listas de Controlo de AcessoDocumento3 páginasListas de Controlo de AcessoLENOXAinda não há avaliações
- 09-Reconhecer As Formas de Propagação Dos VirusDocumento29 páginas09-Reconhecer As Formas de Propagação Dos VirusPedro RochaAinda não há avaliações
- 2 Segurança de Redes UNINTERDocumento18 páginas2 Segurança de Redes UNINTERBruno VilelaAinda não há avaliações
- Conjunto de Dicas para Otimização Do WindowsDocumento9 páginasConjunto de Dicas para Otimização Do Windowsapi-3803977100% (1)
- FTP PDFDocumento6 páginasFTP PDFJônatas Barbosa BAinda não há avaliações
- Manual Do Sim 6050 PDFDocumento36 páginasManual Do Sim 6050 PDFAlex PereiraAinda não há avaliações
- Oi Velox - Como Configurar o Oi Velox Wifi No MacDocumento17 páginasOi Velox - Como Configurar o Oi Velox Wifi No Macthiagocabral88Ainda não há avaliações
- DynaGateway DUO PTDocumento1 páginaDynaGateway DUO PTOrlando MarucaAinda não há avaliações
- Operacoes XTDocumento108 páginasOperacoes XTXXAinda não há avaliações
- Balanca BKDocumento38 páginasBalanca BKsander luiz brazAinda não há avaliações
- Ion8650 M8650a0c0h6e1b0aDocumento3 páginasIon8650 M8650a0c0h6e1b0aWender MartinsAinda não há avaliações
- Especificações Técnicas para Entrega de Conteúdo Nacional em Formato DigitalDocumento21 páginasEspecificações Técnicas para Entrega de Conteúdo Nacional em Formato DigitalGabriel PassarelliAinda não há avaliações
- Configurando Mikrotik Passo A PassoDocumento10 páginasConfigurando Mikrotik Passo A PassoRosemir MoreiraAinda não há avaliações
- DmCard - Guia de InstalaçãoDocumento21 páginasDmCard - Guia de InstalaçãoJohnatas Ferreira PereiraAinda não há avaliações