Você também pode gostar
- Aluno: Izabella Coelho: Usada Conflita Com o Critério de Minimização Do Tempo de Resposta Médio (Tempo Entre oDocumento4 páginasAluno: Izabella Coelho: Usada Conflita Com o Critério de Minimização Do Tempo de Resposta Médio (Tempo Entre oIZABELLA COELHO DA SILVAAinda não há avaliações
- Aula5-Escalonamento de ProcessosDocumento6 páginasAula5-Escalonamento de ProcessosArlindo CorreiaAinda não há avaliações
- Lis Sis Tempo RealDocumento8 páginasLis Sis Tempo Realquio100Ainda não há avaliações
- Escalonamento de Processos - Wikipédia, A Enciclopédia LivreDocumento5 páginasEscalonamento de Processos - Wikipédia, A Enciclopédia LivrePolyAinda não há avaliações
- Sistema Operacional de TempoDocumento18 páginasSistema Operacional de TempofarofadevozAinda não há avaliações
- Algoritmos de EscalonamentoDocumento9 páginasAlgoritmos de Escalonamentomillyyy01Ainda não há avaliações
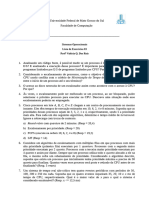
- Lista 03Documento2 páginasLista 03RatPlaysAinda não há avaliações
- Sistemas Operacionais - Cap 08 - Gerência Do Processador (Escalonamento de Processos)Documento14 páginasSistemas Operacionais - Cap 08 - Gerência Do Processador (Escalonamento de Processos)Jean Carlo UemaAinda não há avaliações
- Aps2 Thomas FritschDocumento7 páginasAps2 Thomas FritschThomas FritschAinda não há avaliações
- Lista Cpu (Atividades)Documento7 páginasLista Cpu (Atividades)Vinicius SantiagoAinda não há avaliações
- APS - Escalonamento de Processos FGDocumento4 páginasAPS - Escalonamento de Processos FGiagoAinda não há avaliações
- PerguntasprcmpDocumento4 páginasPerguntasprcmpJoão VieiraAinda não há avaliações
- Exercicios Ismael Vianna Parte 2Documento2 páginasExercicios Ismael Vianna Parte 2Ismael ViannaAinda não há avaliações
- Aula 03A Processos InsutecDocumento57 páginasAula 03A Processos InsutecNarciso Daconceicao Mussuequeno MussuequenoAinda não há avaliações
- Sistema Operacional de Tempo RealDocumento7 páginasSistema Operacional de Tempo RealLuis Eugênio da HoraAinda não há avaliações
- Sistemas OperacionaisDocumento3 páginasSistemas OperacionaisGiovanna SilvaAinda não há avaliações
- Escalonamento de ProcessosDocumento18 páginasEscalonamento de ProcessosA Carlos GarciaAinda não há avaliações
- Exercícios Capítulo 4 04 03 2017Documento3 páginasExercícios Capítulo 4 04 03 2017Iago MeirelesAinda não há avaliações
- Exercicios Todos CapitulosDocumento40 páginasExercicios Todos CapitulosPâmela VieiraAinda não há avaliações
- Sistemas Operacionais Temp 3Documento3 páginasSistemas Operacionais Temp 3Rebecca Beatriz Sousa da SilvaAinda não há avaliações
- 07gerencia Do Process Ad orDocumento19 páginas07gerencia Do Process Ad oreparatesteAinda não há avaliações
- Roteiro de Aula Pratica Sosim - Parte 1Documento5 páginasRoteiro de Aula Pratica Sosim - Parte 1Taina Oliveira SouzaAinda não há avaliações
- Escalonador de Processos e DispatcherDocumento3 páginasEscalonador de Processos e DispatcherGuiGPRAinda não há avaliações
- Lista 02Documento4 páginasLista 02Celio EstevesAinda não há avaliações
- Escalonamento: Retirado Do Livro Do Prof. Carlos Maziero PHDDocumento29 páginasEscalonamento: Retirado Do Livro Do Prof. Carlos Maziero PHDVBoss_ptAinda não há avaliações
- Cap 3 ImplementacaoTarefaSimples SlidesDocumento72 páginasCap 3 ImplementacaoTarefaSimples SlidesAnonymous wrYUas54bAinda não há avaliações
- 4-Leitura e Resolução de Exercícios - Cap5 MazieiroDocumento19 páginas4-Leitura e Resolução de Exercícios - Cap5 MazieiroHamilton Pereira da SilvaAinda não há avaliações
- O Escalonamento de Processos No Mac OSDocumento1 páginaO Escalonamento de Processos No Mac OSRinaldo Matos EstanislauAinda não há avaliações
- Sistema Operacional - Módulo IiDocumento4 páginasSistema Operacional - Módulo IiPedro HenriqueAinda não há avaliações
- Lista SO Unidade1 2018.2Documento5 páginasLista SO Unidade1 2018.2paulotestewebAinda não há avaliações
- Lista de Exercícios Sistemas Operacionais ResolvidaDocumento25 páginasLista de Exercícios Sistemas Operacionais ResolvidaDaniella Zaranza25% (4)
- SO I - Aula 7 EscalonamentoDocumento30 páginasSO I - Aula 7 EscalonamentoValdeir SantosAinda não há avaliações
- Aula 1Documento21 páginasAula 1Nzuzii RodolfoAinda não há avaliações
- Lista de STRDocumento5 páginasLista de STRJulianne YhasminAinda não há avaliações
- Escalonamento de Tarefas PDFDocumento12 páginasEscalonamento de Tarefas PDFAntonio JuniorAinda não há avaliações
- Slides Sistemas OperacionaisDocumento118 páginasSlides Sistemas OperacionaisDieta Da MulherAinda não há avaliações
- Escalonamento de Processos-SlideDocumento21 páginasEscalonamento de Processos-SlidehhnogueiraAinda não há avaliações
- Exercicios SO1 v5Documento8 páginasExercicios SO1 v5claudiaAinda não há avaliações
- Escalonamento de ProcessoDocumento6 páginasEscalonamento de ProcessoAlberto Filomeno CiprianoAinda não há avaliações
- Artigo Sobre Escalonamento de ProcessosDocumento12 páginasArtigo Sobre Escalonamento de ProcessosRenan Felipe0% (1)
- Sistemas Operacionais de Tempo RealDocumento4 páginasSistemas Operacionais de Tempo Realcavalcanti.ryAinda não há avaliações
- So Lista1Documento3 páginasSo Lista1Paulo Henrique GomesAinda não há avaliações
- Escalonamento Da CPUDocumento11 páginasEscalonamento Da CPUKELWEN DE SOUZA PEREIRA SANTOSAinda não há avaliações
- Sistemas em Tempo Real Prova 3Documento11 páginasSistemas em Tempo Real Prova 3RAFAEL PINHEIRO LEITEAinda não há avaliações
- Exercícios Gerência de ProcessosDocumento3 páginasExercícios Gerência de ProcessosNetSul InternetAinda não há avaliações
- Gabarito Lista 1Documento3 páginasGabarito Lista 1edmilsonAinda não há avaliações
- Sistema de Tempo Real Nova - Versão2Documento37 páginasSistema de Tempo Real Nova - Versão220231990020Ainda não há avaliações
- Ger Proc - Escalonamento de ProcessosDocumento36 páginasGer Proc - Escalonamento de ProcessosDiego AraújoAinda não há avaliações
- Lista 02Documento2 páginasLista 02EltonAinda não há avaliações
- Aula06 Escalonamento CpuDocumento29 páginasAula06 Escalonamento CpuBenvindo XavierAinda não há avaliações
- Escalona Process oDocumento148 páginasEscalona Process oMarcelo CopisAinda não há avaliações
- SO Tarefa 4Documento2 páginasSO Tarefa 4arukoufxAinda não há avaliações
- Sistemas Operacionais: Aula 3 - Gerência de ProcessadorDocumento11 páginasSistemas Operacionais: Aula 3 - Gerência de Processadorandre.pinheiro.ofAinda não há avaliações
- Lista de Exercicios Sistemas Operacionais ResolvidaDocumento25 páginasLista de Exercicios Sistemas Operacionais ResolvidaSusana BastosAinda não há avaliações
- Trab AllanDocumento7 páginasTrab AllanVictor SangaliAinda não há avaliações
- Exercícios de SO Parte 1 (Aluno)Documento13 páginasExercícios de SO Parte 1 (Aluno)Bruno Menezes AzevedoAinda não há avaliações
- Escalonador Shortest Job FirstDocumento20 páginasEscalonador Shortest Job FirstsosinsanoAinda não há avaliações
- Escalonamento de ProcessosDocumento2 páginasEscalonamento de ProcessosRomero Franklin Xavier Dantas100% (1)
- Algorítmos de SequenciamentoDocumento16 páginasAlgorítmos de SequenciamentoMilton ManjateAinda não há avaliações
- Nomenclatura TipográficaDocumento12 páginasNomenclatura TipográficaAlexandre Mota100% (2)
- Mat - Ger - 3 - Integrais DuplosDocumento3 páginasMat - Ger - 3 - Integrais DuplosMauro AbnnerAinda não há avaliações
- 2 Série MatematicaDocumento2 páginas2 Série MatematicaRegiane DiasAinda não há avaliações
- Matemática 8º Ano 4º Corte ProfessorDocumento76 páginasMatemática 8º Ano 4º Corte ProfessorLuh Ana100% (1)
- Brochura de Educação Laboral 9 Classe - I Trimestre 2022-2023Documento12 páginasBrochura de Educação Laboral 9 Classe - I Trimestre 2022-2023kienedaniel16Ainda não há avaliações
- Juros CompostosDocumento3 páginasJuros CompostosLucas CauãAinda não há avaliações
- Livro PDF - Estatistica e Probabilidade (Exercícios Resolvidos) - Prof MSC Uanderson RebulaDocumento35 páginasLivro PDF - Estatistica e Probabilidade (Exercícios Resolvidos) - Prof MSC Uanderson RebulaProf MSc Uanderson Rébula100% (1)
- AÇO A 285C RafaelGuimaraesSaviolicorrigida2016 PDFDocumento175 páginasAÇO A 285C RafaelGuimaraesSaviolicorrigida2016 PDFJuliana AguiarAinda não há avaliações
- 1 Ano B ConjuntosDocumento4 páginas1 Ano B ConjuntosBruno CostaAinda não há avaliações
- Somador Completo e Meio SomadorDocumento24 páginasSomador Completo e Meio SomadorKarinesaAinda não há avaliações
- Como Trabalhar Com o OpenGLDocumento382 páginasComo Trabalhar Com o OpenGLadilson9230Ainda não há avaliações
- facuminasCONCEITOS DE ENSINO E A APRENDIZAGEM DA MATEMÁTICA INICIALDocumento34 páginasfacuminasCONCEITOS DE ENSINO E A APRENDIZAGEM DA MATEMÁTICA INICIALMarlon MaresAinda não há avaliações
- Aula05 FUNDACAO (Tensão Admissível Do Solo Fundacoess Diretas)Documento54 páginasAula05 FUNDACAO (Tensão Admissível Do Solo Fundacoess Diretas)camilaeng23Ainda não há avaliações
- A Miséria Do MundoDocumento4 páginasA Miséria Do Mundosgalva19Ainda não há avaliações
- Definição de Grupo PDFDocumento12 páginasDefinição de Grupo PDFroddvelosoAinda não há avaliações
- Filosofia e Educação - Confluências PDFDocumento544 páginasFilosofia e Educação - Confluências PDFMorhamed DiasAinda não há avaliações
- A Polissema 2009Documento337 páginasA Polissema 2009Jussara Rauen RibasAinda não há avaliações
- PsicomotricidadeDocumento107 páginasPsicomotricidademercury1946100% (2)
- Analise de Cobrança de Assuntos Engenharia Civil CespeDocumento19 páginasAnalise de Cobrança de Assuntos Engenharia Civil CespeGabriel NogueiraAinda não há avaliações
- Tabela - Numeros RacionaisDocumento8 páginasTabela - Numeros RacionaisSandra Pedra50% (2)
- Algebra Linear Simulado 1 e 2Documento6 páginasAlgebra Linear Simulado 1 e 2luciovicenteAinda não há avaliações
- Capitulo 2 - Regressão Linear SimplesDocumento45 páginasCapitulo 2 - Regressão Linear SimplesandreiaAinda não há avaliações
- Controle GeométricoDocumento18 páginasControle GeométricoRenan FigueiredoAinda não há avaliações
- Lista de Exercicios CepDocumento30 páginasLista de Exercicios CepWesley WaltersAinda não há avaliações
- Resolucao Fgveco 2006 f1 MatematicaDocumento8 páginasResolucao Fgveco 2006 f1 Matematicalucia.oliveira.santosAinda não há avaliações
- 1 - Exercicio - Conceitos Gerais - 2019.1Documento2 páginas1 - Exercicio - Conceitos Gerais - 2019.1Gedeon DelgadilloAinda não há avaliações
- Relatório Lei de Snell Lab IVDocumento4 páginasRelatório Lei de Snell Lab IVAugusto LimaAinda não há avaliações
- AP1 - Álgebra LinearDocumento3 páginasAP1 - Álgebra LinearThiago MedeirosAinda não há avaliações
- Teoria Da Escolha Racional. Fernando MeirelesDocumento10 páginasTeoria Da Escolha Racional. Fernando MeirelesRodrigo Ferreira100% (1)
- MA12 Unidade 4Documento13 páginasMA12 Unidade 4Pablo Felipe SilvaAinda não há avaliações