Você também pode gostar
- Exercicios GrafcetDocumento6 páginasExercicios GrafcetIsaalexteixfernandes7472Ainda não há avaliações
- 06 Comunicação para Tempo RealDocumento29 páginas06 Comunicação para Tempo RealCarlos FelipeAinda não há avaliações
- Instalando o DBDesigner 4 No Ubuntu 10Documento2 páginasInstalando o DBDesigner 4 No Ubuntu 10Carlos FelipeAinda não há avaliações
- O Manual Do Empreendedor DigitalDocumento140 páginasO Manual Do Empreendedor DigitalJosiany SotolaniAinda não há avaliações
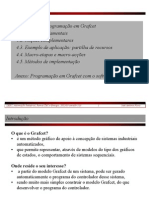
- Grafcet by JAFDocumento115 páginasGrafcet by JAFJJ SaAinda não há avaliações
- Instituto de Mobilidade TerrestreDocumento233 páginasInstituto de Mobilidade TerrestreCarlos FelipeAinda não há avaliações
- Apresentacao TFGDocumento40 páginasApresentacao TFGCarlos FelipeAinda não há avaliações
- Resolucao Dos ProblemasDocumento27 páginasResolucao Dos ProblemasajoaomvAinda não há avaliações
- Aula 04 - Exercícios GrafcetDocumento11 páginasAula 04 - Exercícios GrafcetBruna Alves100% (2)
- TCC - Carlos Felipe de Paiva PerchéDocumento108 páginasTCC - Carlos Felipe de Paiva PerchéCarlos FelipeAinda não há avaliações
- Desenvolvimento de JogosDocumento0 páginaDesenvolvimento de JogosCarlos FelipeAinda não há avaliações
- ApresentacapDocumento4 páginasApresentacapCarlos FelipeAinda não há avaliações
- MSC Ermatias (Tese Mestrado e-GRAFCET) OkDocumento138 páginasMSC Ermatias (Tese Mestrado e-GRAFCET) OkZen_JLAinda não há avaliações
- Aula Ceifadores GrampeadoresDocumento12 páginasAula Ceifadores GrampeadoresCarlos FelipeAinda não há avaliações
- Aula 1 - Introdução e Apresentação de DadosDocumento59 páginasAula 1 - Introdução e Apresentação de DadosCarlos FelipeAinda não há avaliações
- Aula 7 - Variáveis Aleatórias DiscretasDocumento62 páginasAula 7 - Variáveis Aleatórias DiscretasCarlos FelipeAinda não há avaliações
- Aula 2 - Medidas de PosicaoDocumento49 páginasAula 2 - Medidas de PosicaoCarlos FelipeAinda não há avaliações
- Lista 12 - ResolvidaDocumento3 páginasLista 12 - ResolvidaCarlos FelipeAinda não há avaliações
- Lista 13 - ResolvidaDocumento4 páginasLista 13 - ResolvidaCarlos FelipeAinda não há avaliações
- Aula 10 - Estimação PontualDocumento57 páginasAula 10 - Estimação PontualCarlos FelipeAinda não há avaliações
- Aula 5 - ProbabilidadeDocumento95 páginasAula 5 - ProbabilidadeCarlos FelipeAinda não há avaliações
- Pe Carol Amen ToDocumento1 páginaPe Carol Amen ToCarlos FelipeAinda não há avaliações
- Aula 1 - Introdução e Apresentação de DadosDocumento59 páginasAula 1 - Introdução e Apresentação de DadosCarlos FelipeAinda não há avaliações
- Caderno de Informatica Basica LinuxDocumento109 páginasCaderno de Informatica Basica LinuxLourdes HTAinda não há avaliações
- Pe Carol Amen ToDocumento1 páginaPe Carol Amen ToCarlos FelipeAinda não há avaliações
- Usb Pic JavaDocumento42 páginasUsb Pic JavaCarlos FelipeAinda não há avaliações
- Apostila Eagle 4xDocumento51 páginasApostila Eagle 4xFlávio MachadoAinda não há avaliações
- Prova 1Documento1 páginaProva 1Carlos FelipeAinda não há avaliações
- Estrutura Do ProjetoDocumento2 páginasEstrutura Do ProjetoCarlos FelipeAinda não há avaliações
- Service Training 110 - 160-7E PTDocumento160 páginasService Training 110 - 160-7E PTCarlos Paranhos100% (2)
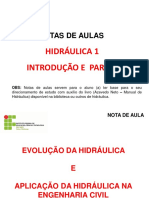
- Notas de Aulas - Hidráulica 1 - Introdução e Parte IDocumento101 páginasNotas de Aulas - Hidráulica 1 - Introdução e Parte Ikleber AlersonAinda não há avaliações
- A Violência em "Rosso Malpelo" de Giovanni VergaDocumento9 páginasA Violência em "Rosso Malpelo" de Giovanni VergajorgedlopesAinda não há avaliações
- Modelo de AprDocumento6 páginasModelo de AprGilmar JuniorAinda não há avaliações
- Microsoft Word - SINTESE SOBRE DISTRIBUIÇAO, ABUNDANCIA, POTENCIAL PESQUEIRO E BIOLOGIA DA LAGOSTE DO NORDESTE DO BRASILDocumento23 páginasMicrosoft Word - SINTESE SOBRE DISTRIBUIÇAO, ABUNDANCIA, POTENCIAL PESQUEIRO E BIOLOGIA DA LAGOSTE DO NORDESTE DO BRASILcelio soaresAinda não há avaliações
- 1 SEGURANÇA NO MANUSEIO DE PRODUTOS QUÍMICOS PDF PDFDocumento41 páginas1 SEGURANÇA NO MANUSEIO DE PRODUTOS QUÍMICOS PDF PDFsorayabergonziAinda não há avaliações
- 1 Astrologia e PsicologiaDocumento33 páginas1 Astrologia e PsicologiaCristina GameiroAinda não há avaliações
- Ebook Gestão de Finanças PessoaisDocumento133 páginasEbook Gestão de Finanças Pessoaiseversonmachado9482Ainda não há avaliações
- Introduçao - Dinâmica Das EstruturasDocumento50 páginasIntroduçao - Dinâmica Das EstruturasBárbara CamposAinda não há avaliações
- Aspectos Do Fantastico e Tradução de Um Conto de Marcel AyméDocumento42 páginasAspectos Do Fantastico e Tradução de Um Conto de Marcel AyméThiago TimAinda não há avaliações
- UC7 RA3 AbortoDocumento5 páginasUC7 RA3 AbortoMaffy SilvaAinda não há avaliações
- NBR 12938 - 1993 - Ácido Fosfórico para Uso Industrial - Determinação de Metais PesadosDocumento2 páginasNBR 12938 - 1993 - Ácido Fosfórico para Uso Industrial - Determinação de Metais Pesadostico 43100% (1)
- Tabela de Preços A - Area - Externa Athermic 2023 PDFDocumento5 páginasTabela de Preços A - Area - Externa Athermic 2023 PDFDieniffer PortoAinda não há avaliações
- Aula - 03 - Transformadores de Medida PDFDocumento94 páginasAula - 03 - Transformadores de Medida PDFypnw100% (1)
- Simples Carregador de Bateria (CIR3302)Documento2 páginasSimples Carregador de Bateria (CIR3302)Darilho Batista IgnacioAinda não há avaliações
- Capítulo 9. Teoria de JogosDocumento5 páginasCapítulo 9. Teoria de JogosJoão Victor Machado TrindadeAinda não há avaliações
- TD01 Revisão PDFDocumento2 páginasTD01 Revisão PDFraellen magdyelliAinda não há avaliações
- Caderno de Exercicios Excel 2007Documento12 páginasCaderno de Exercicios Excel 2007Paulo Jose de Lima100% (2)
- Manual Fechadura HDL C-90Documento1 páginaManual Fechadura HDL C-90Adriano Gomes100% (1)
- Rti Outubro2021Documento92 páginasRti Outubro2021sandro luis vieiraAinda não há avaliações
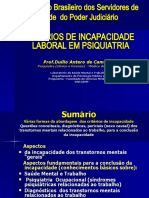
- Incapacidadelaboral DuilioDocumento34 páginasIncapacidadelaboral DuilioAndrea MascarenhasAinda não há avaliações
- Plan0 de Ensino - S.B.C2022.2Documento4 páginasPlan0 de Ensino - S.B.C2022.2infoeletronicoAinda não há avaliações
- Decapagem QuimicaDocumento4 páginasDecapagem QuimicaLuis Carlos Mayer Pereira0% (1)
- Esto QueDocumento65 páginasEsto QueSeba CamposAinda não há avaliações
- Aula+5+ +Transtorno+Da+Personalidade+BorderlineDocumento9 páginasAula+5+ +Transtorno+Da+Personalidade+BorderlineFERNANDAAinda não há avaliações
- Raciocínio Lógico SuperiorDocumento42 páginasRaciocínio Lógico SuperiorEdneia Rodrigues Do Nascimento100% (1)
- Tuina Apostila Final 15-10-12Documento129 páginasTuina Apostila Final 15-10-12haczelAinda não há avaliações
- Poligonos SemelhantesDocumento4 páginasPoligonos SemelhantespcmcamposAinda não há avaliações
- A Divina ProporçãoDocumento4 páginasA Divina ProporçãoEduardo ValeiroAinda não há avaliações
- Lista McuDocumento2 páginasLista McuGilberto Dias de Oliveira FilhoAinda não há avaliações