Você também pode gostar
- Curso ArduinoDocumento104 páginasCurso ArduinoMatheus Winchester50% (2)
- Apostila ArduinoDocumento26 páginasApostila ArduinoPaulo Marcelo Pontes100% (9)
- Apostila Arduino BasicoDocumento18 páginasApostila Arduino BasicopablobmxrpAinda não há avaliações
- Arduino MEGA 2560 - Saiba Mais Sobre A Placa No EmbarcadosDocumento19 páginasArduino MEGA 2560 - Saiba Mais Sobre A Placa No EmbarcadosCarlos Ivan Pinto CorreaAinda não há avaliações
- Projetos e DesafiosDocumento44 páginasProjetos e DesafiosSérgio Lima100% (3)
- Apostila Arduino UnoDocumento83 páginasApostila Arduino UnoJonatas CostaAinda não há avaliações
- Arduino & ESP 8266: Práticas e ComponentesDocumento85 páginasArduino & ESP 8266: Práticas e ComponentesCarlos NascimentoAinda não há avaliações
- Electrônica Com ArduinoDocumento58 páginasElectrônica Com ArduinoAdão Guiomar100% (1)
- Arduino Aula 01 Introducao PDFDocumento22 páginasArduino Aula 01 Introducao PDFGustavo Henrique Barroso100% (1)
- Curso Arduino Shakib 2013Documento100 páginasCurso Arduino Shakib 2013Joana Nogueira100% (3)
- Manual Arduino LabDocumento53 páginasManual Arduino LabLeandroFreitas100% (1)
- Introdução Ao Arduíno Primeiros Passos À Robótica e AutomaçãoDocumento29 páginasIntrodução Ao Arduíno Primeiros Passos À Robótica e AutomaçãoTiago Cofferri EbertsAinda não há avaliações
- Arduino - Introdução - 10 ProjectosDocumento26 páginasArduino - Introdução - 10 ProjectosLulu100% (1)
- Aula 06 - Arduíno - Parte IIDocumento26 páginasAula 06 - Arduíno - Parte IIFlamengo 657100% (1)
- Apostila Arduino UnoDocumento89 páginasApostila Arduino UnoJDTAinda não há avaliações
- Ebook Makers No Transformar Nave A VelaDocumento23 páginasEbook Makers No Transformar Nave A VelaMedina MárcioAinda não há avaliações
- Aula ArduinoDocumento30 páginasAula ArduinoElenilzaSantosAinda não há avaliações
- 01 Apostila Ger Com Servo MotorDocumento25 páginas01 Apostila Ger Com Servo MotorDalia RafaelaAinda não há avaliações
- Documentação de Referencia Arduino - CC em PortuguesDocumento183 páginasDocumentação de Referencia Arduino - CC em PortuguesThiago A. OliveiraAinda não há avaliações
- Iniciação Ao ArduinoDocumento27 páginasIniciação Ao ArduinoRui FerreiraAinda não há avaliações
- Manual Arduino PequenoDocumento13 páginasManual Arduino PequenoPedro Ramos100% (1)
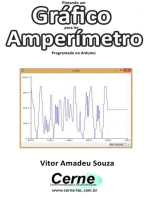
- Plotando Um Gráfico Para Ler Amperímetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Amperímetro Programado No ArduinoAinda não há avaliações
- Arduino Duemilanove Com ATmega328Documento7 páginasArduino Duemilanove Com ATmega328KarlBenzAinda não há avaliações
- Tutorial Módulo Wireless Esp8266 Com Arduino - FilipeflopDocumento46 páginasTutorial Módulo Wireless Esp8266 Com Arduino - Filipeflopmapa2509Ainda não há avaliações
- ERUS Minicurso ArduinoDocumento18 páginasERUS Minicurso ArduinoThiago PradoAinda não há avaliações
- Arduíno IntroduçãoDocumento47 páginasArduíno IntroduçãoMurky NightblueAinda não há avaliações
- Iniciação Ao ArduinoDocumento38 páginasIniciação Ao ArduinocmcolivaresAinda não há avaliações
- PMCUDocumento8 páginasPMCUArylton PaulinoAinda não há avaliações
- 1 - Arduino..Documento14 páginas1 - Arduino..Polyana CarvalhoAinda não há avaliações
- 1 - Introdução Ao ArduinoDocumento10 páginas1 - Introdução Ao ArduinoWesley AndradeAinda não há avaliações
- 4 - ManualResumidoArduinoDocumento18 páginas4 - ManualResumidoArduinoLilian GuattariAinda não há avaliações
- Mini Curso Arduino PDFDocumento22 páginasMini Curso Arduino PDFNewton GomesAinda não há avaliações
- Apostila Arduino Nas EletivasDocumento7 páginasApostila Arduino Nas EletivasMario PauloAinda não há avaliações
- Arduino DestacomDocumento25 páginasArduino DestacomRone SilvaAinda não há avaliações
- Arduino AuçaDocumento6 páginasArduino AuçaLuís (ルィス)Ainda não há avaliações
- Como Controlar LEDs Com o ArduinoDocumento28 páginasComo Controlar LEDs Com o ArduinoSalviano SantosAinda não há avaliações
- 02 Uc Arduino ATmega SW LEDDocumento47 páginas02 Uc Arduino ATmega SW LEDCharles Borges de LimaAinda não há avaliações
- ArduinoDocumento4 páginasArduinotchepssilveiraAinda não há avaliações
- Curso Robótica Adélia - Aula - 01Documento78 páginasCurso Robótica Adélia - Aula - 01André AmorimAinda não há avaliações
- Introdução Ao Arduino - 07.11.2023Documento15 páginasIntrodução Ao Arduino - 07.11.2023Douglas ChananAinda não há avaliações
- Curso Programação Básica MinicursoDocumento42 páginasCurso Programação Básica MinicursoJunior Castelo BrancoAinda não há avaliações
- ResumoDocumento3 páginasResumoDom Fuas Manuel ArmandoAinda não há avaliações
- Manual SeacDocumento87 páginasManual Seacfrederixo09Ainda não há avaliações
- Trabalho AleatóDocumento15 páginasTrabalho AleatóGabriel OtaranAinda não há avaliações
- Aula 2Documento12 páginasAula 2Marden Deivson de MeloAinda não há avaliações
- Manual Arduino #1Documento3 páginasManual Arduino #1tiagoandredafonsecapereiraAinda não há avaliações
- Guia Arduino - Rev1 - Felipe - CrispimDocumento14 páginasGuia Arduino - Rev1 - Felipe - CrispimRenatoAinda não há avaliações
- Uma Visão Preliminar Sobre Os Sistemas EmbarcadosDocumento94 páginasUma Visão Preliminar Sobre Os Sistemas Embarcadoshdabhr463Ainda não há avaliações
- Relatório Arduino 2Documento9 páginasRelatório Arduino 2junepreAinda não há avaliações
- Curso de ArduinoDocumento32 páginasCurso de ArduinoWalisson MarquesAinda não há avaliações
- Apostila - Aprenda Robótica Com ArduinoDocumento29 páginasApostila - Aprenda Robótica Com ArduinoOlney JonerAinda não há avaliações
- Arduino BasicoDocumento4 páginasArduino BasicoleandrobtfilhoAinda não há avaliações
- Aula 06 Portas DigitaisDocumento23 páginasAula 06 Portas DigitaisdeiveramboAinda não há avaliações
- Como Programar A Digispark ATtiny85 Com IDE Arduino - Arduino e CiaDocumento10 páginasComo Programar A Digispark ATtiny85 Com IDE Arduino - Arduino e CiaAndersonAinda não há avaliações
- Tarefa 1Documento7 páginasTarefa 1Marcelo OliveiraAinda não há avaliações
- Plotando Um Gráfico Para Ler Barômetro Programado No ArduinoNo EverandPlotando Um Gráfico Para Ler Barômetro Programado No ArduinoAinda não há avaliações
- Implementando Um Alarme Com Detector De Fumaça No ArduinoNo EverandImplementando Um Alarme Com Detector De Fumaça No ArduinoAinda não há avaliações
- Desenvolvendo Uma Aplicação Cliente Servidor Com O Esp32 Programado No ArduinoNo EverandDesenvolvendo Uma Aplicação Cliente Servidor Com O Esp32 Programado No ArduinoAinda não há avaliações
- Estudo Das Cores Com Arduino, Scratch e TrackerDocumento7 páginasEstudo Das Cores Com Arduino, Scratch e Trackercristavo20084412Ainda não há avaliações
- CARDOSO, ZANNIN2019-Proposta Experimental para Análise Das Variáveis de Estado Dos Gases Com ArduinoDocumento6 páginasCARDOSO, ZANNIN2019-Proposta Experimental para Análise Das Variáveis de Estado Dos Gases Com Arduinovitoria mariaAinda não há avaliações
- Lista Exercicios AVR e Arduino 2a EdDocumento39 páginasLista Exercicios AVR e Arduino 2a EdCarlos Fransley Scatambulo CostaAinda não há avaliações
- Lógica FuzzyDocumento39 páginasLógica FuzzyJulio Godoy50% (2)
- Nossos Robôs - Arduino Com MATLAB! Mini TutorialDocumento7 páginasNossos Robôs - Arduino Com MATLAB! Mini TutorialSarah Silveira MendesAinda não há avaliações
- Controle Digital de SistemasDocumento61 páginasControle Digital de SistemasMaickson LeãoAinda não há avaliações
- Projecto de Curso (Acionamento Controle de Velocidade e Frenagem de Motores de Indução Trifásica)Documento66 páginasProjecto de Curso (Acionamento Controle de Velocidade e Frenagem de Motores de Indução Trifásica)Roberto MoiamboAinda não há avaliações
- Acionamento de Motor Elétrico Via Bluetooth de Celular PDFDocumento117 páginasAcionamento de Motor Elétrico Via Bluetooth de Celular PDFolaolaolaola123Ainda não há avaliações
- Sistema de Monitoramento E Controle de Estufas para Cultivo de TemperosDocumento38 páginasSistema de Monitoramento E Controle de Estufas para Cultivo de TemperosRafael BaldinAinda não há avaliações
- Dinamometro Digital 2013nDocumento9 páginasDinamometro Digital 2013nandreflemingAinda não há avaliações
- Alimentador Equino Boneco PTCC - Etec 103 (3D3)Documento10 páginasAlimentador Equino Boneco PTCC - Etec 103 (3D3)Vitor HugoAinda não há avaliações
- Rel Oximetro Marcio-MacielDocumento15 páginasRel Oximetro Marcio-MacielMarcio AlfeoAinda não há avaliações
- PAP Projeto ColunaDocumento39 páginasPAP Projeto ColunaDiana PeixotoAinda não há avaliações
- WS2812FX GuiaDocumento14 páginasWS2812FX GuiaMarcelo FariasAinda não há avaliações
- UntitledDocumento23 páginasUntitledcristianeAinda não há avaliações
- P5 - Aeropêndulo (Identificação)Documento8 páginasP5 - Aeropêndulo (Identificação)Lucas RenanAinda não há avaliações
- Apostila Eletrogate - Kit Arduíno KidsDocumento66 páginasApostila Eletrogate - Kit Arduíno KidsArnaldo de OliveiraAinda não há avaliações
- Aula32 Kit Chassi 2wd RoboDocumento16 páginasAula32 Kit Chassi 2wd RoboPaulo HenriqueAinda não há avaliações
- Projeto Arduino Com Display LCD, Sensor de Temperatura e Sensor de Luminosidade PDFDocumento7 páginasProjeto Arduino Com Display LCD, Sensor de Temperatura e Sensor de Luminosidade PDFjuliodesenhistaAinda não há avaliações
- Aula 4 - ArduinoDocumento82 páginasAula 4 - ArduinoRamon FelipeAinda não há avaliações
- Ficha Botão - Potenciometro - LDR - LEDDocumento22 páginasFicha Botão - Potenciometro - LDR - LEDPaulo Rocha100% (1)
- Relatório Arduino 2Documento9 páginasRelatório Arduino 2junepreAinda não há avaliações
- 2.01 Kit DDSDocumento23 páginas2.01 Kit DDSSpecialarts ArcadeAinda não há avaliações
- Comunicação Sem Fio Com o Módulo RF 433 MHZDocumento2 páginasComunicação Sem Fio Com o Módulo RF 433 MHZEduardo MendesAinda não há avaliações
- RoboCore - Kit Avancado para Arduino V3Documento55 páginasRoboCore - Kit Avancado para Arduino V3Giorgio FernandesAinda não há avaliações
- Medir Kron Com ArduinoDocumento9 páginasMedir Kron Com ArduinoJoao Batista FreitasAinda não há avaliações
- TCC ARTIGO - REVISADO Numero PagDocumento21 páginasTCC ARTIGO - REVISADO Numero PagVinicius PortoAinda não há avaliações