Você também pode gostar
- A Chave Da Consciência - Hinaldo Breguez PDFDocumento110 páginasA Chave Da Consciência - Hinaldo Breguez PDFMichelliPossmozerAinda não há avaliações
- 4-Diagrama Unifilar - Marcio - R00Documento1 página4-Diagrama Unifilar - Marcio - R00Joao Paulo100% (2)
- Ultrassom: Fundamentos e AplicaçõesDocumento17 páginasUltrassom: Fundamentos e AplicaçõesAlexandre Pelegrinelli0% (1)
- Manual do usuário bancada de testeDocumento7 páginasManual do usuário bancada de testeFernando BatistaAinda não há avaliações
- Desenho Basico de EletrônicaDocumento67 páginasDesenho Basico de EletrônicanilsoneryAinda não há avaliações
- 37 Eletrostatica0Documento13 páginas37 Eletrostatica0api-3713096100% (1)
- Exercícios Básicos Termometria (Professor Jhonnes)Documento3 páginasExercícios Básicos Termometria (Professor Jhonnes)Jones Santos da Silva100% (2)
- Tim Ingold - The Perception of The EnvironmentDocumento20 páginasTim Ingold - The Perception of The EnvironmentBolivar MariniAinda não há avaliações
- O início da fase adulta: desafios e mudançasDocumento22 páginasO início da fase adulta: desafios e mudançasLorival22Ainda não há avaliações
- Introducao A Eletronica PrincipiantesDocumento47 páginasIntroducao A Eletronica PrincipiantesAnonymous ig2qZLCqNpAinda não há avaliações
- Manual Mecanica Electronic A FICDocumento82 páginasManual Mecanica Electronic A FICCelia TafaAinda não há avaliações
- CA01Documento0 páginaCA01José Lúcio FigueiredoAinda não há avaliações
- Para Dobrar AcrilicoDocumento3 páginasPara Dobrar AcrilicoJosé Lúcio FigueiredoAinda não há avaliações
- Módulo 6007Documento2 páginasMódulo 6007José Lúcio FigueiredoAinda não há avaliações
- Manual PWM Completo (Mecatronicadegaragem - Blogspot.com)Documento6 páginasManual PWM Completo (Mecatronicadegaragem - Blogspot.com)Rodrigo CedrimAinda não há avaliações
- CA07Documento0 páginaCA07José Lúcio FigueiredoAinda não há avaliações
- Apostila - Eletrônica Analógica (Semicondutores)Documento10 páginasApostila - Eletrônica Analógica (Semicondutores)Tenório AdirAinda não há avaliações
- Intruducao A Eletronica IlustradaDocumento47 páginasIntruducao A Eletronica IlustradaRinaldo Francisco100% (1)
- Relatoriomotores CCDocumento71 páginasRelatoriomotores CCIkaro MatosAinda não há avaliações
- Como Deixar Visível VDD e VSS No ProteusDocumento16 páginasComo Deixar Visível VDD e VSS No ProteusveerakumarsAinda não há avaliações
- Eletrônica de Potência - Ivo BarbiDocumento327 páginasEletrônica de Potência - Ivo BarbiCelso CiamponiAinda não há avaliações
- Trabalho de TicDocumento4 páginasTrabalho de TicJosé Lúcio FigueiredoAinda não há avaliações
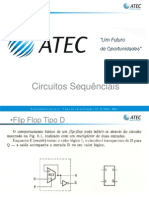
- Sequênciais ATECDocumento9 páginasSequênciais ATECJosé Lúcio FigueiredoAinda não há avaliações
- Plano de Aula (Aula 12) - Ensino RemotoDocumento2 páginasPlano de Aula (Aula 12) - Ensino RemotoFelipe BacelarAinda não há avaliações
- Forno SolarDocumento1 páginaForno SolarDavid MourãoAinda não há avaliações
- NR 10 e Segurança ElétricaDocumento76 páginasNR 10 e Segurança ElétricaelsribeiroAinda não há avaliações
- Resistência dos materiais - Lista 01Documento8 páginasResistência dos materiais - Lista 01jadocb1Ainda não há avaliações
- Estática dos fluidos: pressão, unidades e teoremasDocumento50 páginasEstática dos fluidos: pressão, unidades e teoremasLOlzitoAinda não há avaliações
- Cespe 2016 Policia Cientifica Pe Perito Criminal Quimica ProvaDocumento14 páginasCespe 2016 Policia Cientifica Pe Perito Criminal Quimica ProvaThiago FagundesAinda não há avaliações
- Misturas Homogêneas E Heterogêneas: - Substância PuraDocumento3 páginasMisturas Homogêneas E Heterogêneas: - Substância PuramonqieAinda não há avaliações
- Lista 1 F Sica Geral 1Documento2 páginasLista 1 F Sica Geral 1VALDILEIA OLIVEIRA DOS SANTOSAinda não há avaliações
- Concurso IFCE Edital 02 2021 Professor FísicaDocumento82 páginasConcurso IFCE Edital 02 2021 Professor FísicaCamilanunes Olinda NunesAinda não há avaliações
- A INFLUÊNCIA DAS PRÁTICAS CORPORAIS NAS DOENÇAS CRôNICO-DEGENERATIVASDocumento33 páginasA INFLUÊNCIA DAS PRÁTICAS CORPORAIS NAS DOENÇAS CRôNICO-DEGENERATIVASLenilson silas batistaAinda não há avaliações
- Instituto Aocp 2019 See PB Professor Educacao Fisica ProvaDocumento15 páginasInstituto Aocp 2019 See PB Professor Educacao Fisica ProvaLeonardo PimentelAinda não há avaliações
- Teorias pós-críticas e diversidade culturalDocumento12 páginasTeorias pós-críticas e diversidade culturalMarcela PereiraAinda não há avaliações
- MegaCPK, HPK-L, Magnochem, Magnochem-Bloc, Meganorm - 2731.450 - 07 - Folleto de Curvas Caraterísticas 50 HZDocumento172 páginasMegaCPK, HPK-L, Magnochem, Magnochem-Bloc, Meganorm - 2731.450 - 07 - Folleto de Curvas Caraterísticas 50 HZAldoAinda não há avaliações
- Ondas físicas em cordas e superfícies - exercícios resolvidosDocumento3 páginasOndas físicas em cordas e superfícies - exercícios resolvidosDavidson MirandaAinda não há avaliações
- Agentes Físicos Temperaturas ExtremasDocumento72 páginasAgentes Físicos Temperaturas ExtremasgauchoprAinda não há avaliações
- Controladores de PotênciaDocumento8 páginasControladores de PotênciaEliano Lopes OliveiraAinda não há avaliações
- Calor e temperatura: conceitos fundamentaisDocumento22 páginasCalor e temperatura: conceitos fundamentaisGeovanna MatosAinda não há avaliações
- Resistência e ResistividadeDocumento7 páginasResistência e ResistividadeMark RochaAinda não há avaliações
- Balanceamento QuímicoDocumento1 páginaBalanceamento QuímicoLilian SilvaAinda não há avaliações
- Fisica - TrabalhoDocumento2 páginasFisica - TrabalhoVanessa BarradasAinda não há avaliações
- A arquitetura teatral como expressão do culto a DionísioDocumento262 páginasA arquitetura teatral como expressão do culto a DionísioWallace Almeida de OliveiraAinda não há avaliações
- Oficina de renda de bilro: posturas das aprendizesDocumento8 páginasOficina de renda de bilro: posturas das aprendizesangeladcAinda não há avaliações