Você também pode gostar
- A Gestc3a3o Da Manutenc3a7c3a3o IndustrialDocumento19 páginasA Gestc3a3o Da Manutenc3a7c3a3o IndustrialIsaias Melo SilvaAinda não há avaliações
- TPMDocumento58 páginasTPMcr_sskimotoAinda não há avaliações
- AerodinïnamicaDocumento10 páginasAerodinïnamicaDavid MonteiroAinda não há avaliações
- A Gestc3a3o Da Manutenc3a7c3a3o IndustrialDocumento19 páginasA Gestc3a3o Da Manutenc3a7c3a3o IndustrialIsaias Melo SilvaAinda não há avaliações
- Gestão IndustrialDocumento92 páginasGestão IndustrialDavid MonteiroAinda não há avaliações
- Angulo SDocumento30 páginasAngulo SDavid MonteiroAinda não há avaliações
- CFM MarDocumento157 páginasCFM MarDavid MonteiroAinda não há avaliações
- 7 - Engrenagens ConicasDocumento52 páginas7 - Engrenagens Conicasjulio_cesar_wAinda não há avaliações
- Drive Selector CestariDocumento6 páginasDrive Selector CestariDavid MonteiroAinda não há avaliações
- Tabelas para C - Lculo de CorreiasDocumento4 páginasTabelas para C - Lculo de CorreiasthalesfiotAinda não há avaliações
- 10 - Mancais de DeslizamentoDocumento48 páginas10 - Mancais de DeslizamentoDavid MonteiroAinda não há avaliações
- 9 - Mancais de RolamentosDocumento92 páginas9 - Mancais de RolamentosDavid Monteiro100% (1)
- TPC-3 Frequência - 18 - 1 - 2013Documento1 páginaTPC-3 Frequência - 18 - 1 - 2013David MonteiroAinda não há avaliações
- Curso Automação Aula 01 - TelecursoDocumento8 páginasCurso Automação Aula 01 - TelecursoelrigoAinda não há avaliações
- Manual de Formulas Tecnicas PDFDocumento49 páginasManual de Formulas Tecnicas PDFJosierBaiottoAinda não há avaliações
- Aula 5 - Dimensionamento de EixoDocumento6 páginasAula 5 - Dimensionamento de EixoDavid MonteiroAinda não há avaliações
- Calculo Elem MaquinaDocumento16 páginasCalculo Elem MaquinaDavid MonteiroAinda não há avaliações
- 01 CT Unidades de MedidasDocumento11 páginas01 CT Unidades de MedidasCláudio BarretosAinda não há avaliações
- Calc Redutor1Documento1 páginaCalc Redutor1Riky PtAinda não há avaliações
- Calculo Elem MaquinaDocumento16 páginasCalculo Elem MaquinaDavid MonteiroAinda não há avaliações
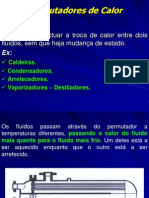
- 4 Permutadores de Calor 3Documento18 páginas4 Permutadores de Calor 3David MonteiroAinda não há avaliações
- Automacao Autoa02Documento7 páginasAutomacao Autoa02Profissional SENAIAinda não há avaliações
- 3 FluidosDocumento26 páginas3 FluidosDavid MonteiroAinda não há avaliações
- ITUR ConsultaDocumento111 páginasITUR ConsultaartnevesAinda não há avaliações
- STEP7 MicroWINDocumento32 páginasSTEP7 MicroWINJosé BarbosaAinda não há avaliações
- Alternador - EsquemaDocumento35 páginasAlternador - EsquemaErivaldo Gonçalves100% (1)
- Sebenta de ArteDocumento80 páginasSebenta de ArteDavid MonteiroAinda não há avaliações
- Espaço Vetorial 108Documento153 páginasEspaço Vetorial 108sargento_1636100% (2)
- DOM3300Documento14 páginasDOM3300ravardieresudAinda não há avaliações
- Resenha Educação AmbientalDocumento7 páginasResenha Educação AmbientalCarlos Alberto Santos50% (2)
- Guia - Como Ler Seu Perfil HologenéticoDocumento40 páginasGuia - Como Ler Seu Perfil HologenéticoMaria Tereza PradoAinda não há avaliações
- Conteúdo Programático - Teens - CNA Teens On 1 A 4 - 1Documento4 páginasConteúdo Programático - Teens - CNA Teens On 1 A 4 - 1dije999Ainda não há avaliações
- Geometria Analitica e Algebra Linear para IniciantesDocumento172 páginasGeometria Analitica e Algebra Linear para IniciantesAnonymous fdZ815WAinda não há avaliações
- Namoro Na Adolescencia 2Documento3 páginasNamoro Na Adolescencia 2renanAinda não há avaliações
- Exercícios+-+Dia+da+Feira+de+Profissões PDFDocumento9 páginasExercícios+-+Dia+da+Feira+de+Profissões PDFLourencoCalegarioCelinAinda não há avaliações
- Localidades TlaxcalaDocumento33 páginasLocalidades Tlaxcalamonserrat cuatepotzo gonzalezAinda não há avaliações
- Padraoderespostas DireitoCivilDocumento8 páginasPadraoderespostas DireitoCivilMarques MarquesAinda não há avaliações
- SEIBEL & OLIVEIRA (2006) - ClientelismoDocumento11 páginasSEIBEL & OLIVEIRA (2006) - ClientelismoAnaAinda não há avaliações
- Resumo Doug LemovDocumento12 páginasResumo Doug LemovKarla Mascarenhas100% (4)
- Jogral - Quem É DeusDocumento6 páginasJogral - Quem É Deuskallyo brunoAinda não há avaliações
- InterculturalidadeDocumento7 páginasInterculturalidadeMatilde VazAinda não há avaliações
- Aula Hymenolepis Taenia CisticercoseDocumento46 páginasAula Hymenolepis Taenia CisticercoseJonathan VieiraAinda não há avaliações
- Recrutamento Online Uma RealidadeDocumento2 páginasRecrutamento Online Uma RealidadeRafael IasiAinda não há avaliações
- Lista de Exercicios 20 - Fisica 2 IntegradoDocumento5 páginasLista de Exercicios 20 - Fisica 2 Integradoدانيال دينيزAinda não há avaliações
- O Primeiro Livro de Adão e EvaDocumento23 páginasO Primeiro Livro de Adão e EvaHarringson Borges de Albuquerque100% (6)
- Aula 8 - Estado Das Argilas - Atividade e SensibilidadeDocumento13 páginasAula 8 - Estado Das Argilas - Atividade e SensibilidadeDesireé Alves0% (1)
- Aula - Pratica.04 Extracao - Com.solvente IodoDocumento3 páginasAula - Pratica.04 Extracao - Com.solvente Iodoromuloethiane67% (3)
- Doenças Dos Peixes OrnamentaisDocumento35 páginasDoenças Dos Peixes OrnamentaisAlexandre Silva Milanez MoreiraAinda não há avaliações
- Comentários de Dudjom Rinpoche - A Iluminação Da Sabedoria PrimordialDocumento9 páginasComentários de Dudjom Rinpoche - A Iluminação Da Sabedoria PrimordialAluísio TelesAinda não há avaliações
- Acabamento em MadeirasDocumento180 páginasAcabamento em MadeirasGiliane SilvaAinda não há avaliações
- Panorama Da História Da Igreja - Alderi Souza MatosDocumento50 páginasPanorama Da História Da Igreja - Alderi Souza Matosguimabsi100% (3)
- Quantas Vidas Eu Tivesse Eu DariaDocumento98 páginasQuantas Vidas Eu Tivesse Eu DarianmsAinda não há avaliações
- A Bússola Do Obi - Segunda EdiçãoDocumento68 páginasA Bússola Do Obi - Segunda EdiçãoGerson Almeida100% (7)
- AD1 Língua Portuguesa 2 CEDERJDocumento4 páginasAD1 Língua Portuguesa 2 CEDERJEmily BernardoAinda não há avaliações
- Rubens Muzio - O DNA Da Liderança Cristã PDFDocumento17 páginasRubens Muzio - O DNA Da Liderança Cristã PDFArlei Veloso50% (2)
- 1Documento1 página1Chris RedfieldAinda não há avaliações
- Orixas - 3 - Umbanda Cristica - Os Sagrados Orixas PDFDocumento10 páginasOrixas - 3 - Umbanda Cristica - Os Sagrados Orixas PDFHanna de BuenoAinda não há avaliações
- UFCD 8622 Ficha de Trabalho Nº2Documento2 páginasUFCD 8622 Ficha de Trabalho Nº2Margarida Rodrigues0% (1)