Escolar Documentos
Profissional Documentos
Cultura Documentos
Diagrama Olho Equa
Enviado por
Rogério PereiraDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Diagrama Olho Equa
Enviado por
Rogério PereiraDireitos autorais:
Formatos disponíveis
Tarefa 5 - Comunicação Digital
Rogério Pereira Junior
Programa de Pós Graduação em Engenharia Elétrica - UFSC
May 11, 2017
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 1 / 27
Discussão
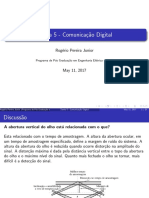
A abertura vertical do olho está relacionada com o que?
Esta relacionado com o tempo de amostragem. A altura da abertura ocular, em
um tempo de amostragem especificado, define a margem de ruı́do do sistema. A
altura da abertura do olho é reduzida quando ocorre distorção na amplitude do
sinal. A distorção máxima é dada pela distância vertical entre o topo da abertura
do olho e o máximo nı́vel do sinal. Quanto mais fechado o olho se tornar, mais
difı́cil é a detecção do sinal.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 2 / 27
Discussão
A abertura horizontal do olho está relacionada com o que?
O eixo horizontal, representando o tempo, expande o intervalo de sı́mbolo de
–Tb/2 a +Tb/2, no qual Tb é a duração do bit.
A largura da abertura ocular (no eixo horizontal) define o intervalo de tempo
sobre o qual o sinal recebido pode ser amostrado sem erro de interferência
intersimbólica. O melhor momento de amostragem é o que corresponde ao de
maior abertura vertical do olho.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 3 / 27
Discussão
Como ficaria o diagrama para o caso de 4-PAM?
O padrão de olho para um sistema de transmissão de dados 4-PAM contém 3 (M
– 1) aberturas de olho empilhadas verticalmente uma em cima da outra. Os
limiares são definidos pelos nı́veis de transição de amplitude enquanto nos
movemos para cima uma abertura de olho para sua adjacente.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 4 / 27
Resposta em Frequência Canal Telefonico
Retirado de: PROAKIS, John; SALEHI, Masoud; BAUCH, Gerhard.
Contemporary communication systems using MATLAB. Nelson Education, 2012.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 5 / 27
MMSE vs ZF
Uma abordagem de alternativa de equalização consiste em minimizar a
diferenças quadrática média entre a resposta de saı́da do equalizador e a
resposta desejada com ISI zero.
Isso é conhecido como o método do mı́nimo erro quadrático médio (MMSE)
para o projeto de equalizadores transversais.
Ele não tenta forçar que a amostras de pulsos sejam zero, mas busca
minimizar o erro quadrático médio considerando um conjunto de amostras de
saı́da.
O projeto MMSE leva a um equalizador mais robusto para a redução de ISI,
além de não amplificar o ruı́do como é feito no ZF.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 6 / 27
Exercı́cio 3.18 do Sklar.
Dado x = [0.1; 0.3; −0.2; 1; 0.4; −0.1; 0.1] e z = [0; 1; 0], queremos um
equalizador ZF de 3 taps(N = 1). Os coeficientes do equalizador são dados por:
c = x−1 .z
Montando a matrix x de acordo com equação 3.86 do Sklar e fazendo a inversa da
mesma
c− 1 = 0.2593
c0 = 0.8347
c1 = −0.3079
Temos na saı́da do equalizador z[k] para k = 0, ±1, ±2 e ±3 os seguintes valores
z[k] = [0.0259; 0.16126; 0.16776; 0; 1; 0; −0.1807; 0.11426; −0.0308]
Maior resposta em magnitude que contribui para ISI é 0.1807 e a soma das
magnitudes de todas as contribuições é 0.68068.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 7 / 27
Exercı́cio 3.18 do Sklar.
Dado x = [0.1; 0.3; −0.2; 1; 0.4; −0.1; 0.1] e z = [0; 1; 0], queremos um
equalizador MMSE de 3 taps(N = 1). Utilizando Matlab temos:
c− 1 = 0.1711; c0 = 0.8544; c1 = −0.2977
z[k] = [0.017; 0.136; 0.192; −0.0891; 0.9824; 0.0270; −0.1874; 0.1152; −0.0298]
Maior resposta em magnitude que contribui para ISI é 0.1923 e a soma das
magnitudes de todas as contribuições é 0.7935.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 8 / 27
Equalizador DFE
A limitação básica de um equalizador linear, como o filtro transversal, é que ele
funciona mal em canais com nulos espectrais. Tais canais são frequentemente
encontrados em aplicações de rádio móvel. Um equalizador de retorno de decisão
(DFE) é um equalizador não-linear que usa decisões de detecções anteriores para
eliminar a ISI em pulsos que estão atualmente sendo demodulados.
Equalização eficaz sem o risco de amplificar o ruı́do
Quando um sı́mbolo tiver sido detectado e decidiso, a ISI que ele induz sobre
sı́mbolos futuros pode ser estimada e subtraida antes da detecção dos
sı́mbolos subsequentes;
Em outras palavras, o filtro de realimentação tentar cancelar a ISI de
amostras anteriores de dados;
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 9 / 27
Equalizador DFE
A vantagem de uma implementação de DFE é que o filtro de realimentação,
que está adicionalmente trabalhando para remover ISI opera em nı́veis
quantizados silenciosos
Equalizador sujeito a um fenômeno particular conhecido como propagação de
erro.
Quando o dispositivo de decisão comete um erro, o simbolo errôneo será
enviado ao filtro de realimentação e usado para cancelamento da ISI. Porém,
como o sı́mbolo é incorreto, em vez de cancelar a ISI, a subtração de
cancelamento pode, reforçar a ISI.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 10 / 27
Equalizador MLSE
Além dos equalizadores transversais e de realimentação, outra tipo de soluções,
tida como mais robusta baseia-se na técnica de estimação de máxima
verossimilhança, também chamados de equalizadores MLSE.
A equalização através da detecção de sequências de máxima verossimilhança
realiza uma busca explı́cita da sequência mais provavelmente transmitida, com
base no conhecimento da sequência recebida. Para isto, é necessária uma
estimativa da relação entrada-saı́da do canal, cujo comportamento é suposto
linear.
A vantagem do MLSE é que ele evita o problema de amplificação de ruı́do, uma
vez que não usa um filtro de equalização,e sim estima a sequência de sı́mbolos
transmitidos. Porém, como desvantagem trata-se de uma técnica cuja
complexidade computacional é superior a dos equalizadores transversais e DFE.
Para estimar e rastrear o canal, é utilizado o algoritmo LMS que usa estimativas
para o vetor gradiente, baseadas em valores de amostra do vetor de entrada e do
sinal de erro, de forma a atualizar o vetor de pesos do equalizador.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 11 / 27
Equalização Adaptativa
Em um ambiente de telecomunicações real, o canal geralmente é variante no
tempo. Assim o uso de um par fixo de fitro casado e equalizador projetado em
função das caracteristicas médias pode não reduzir adequadamente os efeitos de
ISI e ruı́do do canal. É necessario um receptor adaptativo
Um equalizador é adaptativo no sentido de que os coeficientes do mesmo são
ajustados automaticamente de acordo com um algoritmo incoporado. Ou seja, um
equalizador adaptativo ajusta continuamente os coeficientes dos pontos de
tomada do equalizador, de forma a compensar a natureza variante no tempo dos
canais de telefonia e sem fio, o que constitui uma outra realidade prática de
comunicações digitais.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 12 / 27
Simulação - Equalização
Coeficientes da resposta do canal: h = [0.1; −0.3; 0.8; −0.3; 0.1]
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 13 / 27
Simulação - Equalização
Dado x o mesmo do exercicio 3.18 do sklar: x = [0.1; 0.3; −0.2; 1; 0.4; −0.1; 0.1]
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 14 / 27
Simulação - Equalização
Equalizador ZF de 7 taps
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 15 / 27
Simulação - Equalização
Equalizador ZF de 7 taps
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 16 / 27
Simulação - Equalização
Equalizador ZF de 7 taps
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 17 / 27
Sincronismo
O sincronismo, em seus diversos aspectos, é
Fundamental para o correto funcionamento de qualquer sistema de
comunicação de dados.
Utilizado devido às diferenças entre os clocks de tempo e frequência do
transmissor com o receptor.
Essas diferenças acontecem devido as caracterı́sticas e imperfeições do meio
de transmissão, que adiciona o ruı́do e atrasos imprevisı́veis ao sinal
transmitido;
Para mitigar os efeitos do canal, além do uso do filtro casado e do
equalizador, é necessario uma técnica de sincronismo, para que o receptor
consiga identificar o mesmo sinal emitido pelo transmissor.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 18 / 27
Sincronismo de Sı́mbolo
O problema do sincronismo de sı́mbolo consiste em obter no receptor uma
réplica do relógio utilizado no transmissor. Em outras palavras, o receptor
deve ser capaz de estimar adequadamente o inı́cio e o final de cada sı́mbolo.
À tarefa de determinar os instantes de inı́cio e fim de cada sı́mbolo dá-se o
nome de sincronização de sı́mbolos;
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 19 / 27
Sincronismo de Frame
Tem como objetivo determinar os instantes de começo e fim da mensagem,
sem deslocamento de bits.
Por exemplo, se um código de bloco for usado para o controle de erro direto,
o decodificador precisa conhecer a localização de limites entre palavras
código para decodificar a mensagem corretamente;
Se o canal de comunicação for compartilhado no tempo, de forma regular,
por vários usuários (TDMA), é necessário saber onde está a localização dos
limites entre os usuários do canal, a fim de encaminhar a informação
adequadamente.
Em geral é realizada digitalmente com o envio de sequências pré-definidas de
sı́mbolos para “treinar” o receptor no inı́cio da transmissão (causa desperdicio de
potência). Assim o receptor faz a correlação entre a mensagem recebida com a
sequência conhecida, de modo a identificar a posição da sequência conhecida
dentro da mensagem recebida.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 20 / 27
Sincronismo de portadora
Quando utilizamos a detecção coerente (necessidade do conhecimento de fase do
sinal transmitido) na sinalização através de canais AWGN e modulação de uma
portadora sinusoidal, para que a demodulação seja realizada com sucesso o
receptor deve saber a frequência e fase do sinal de portadora utilizado pelo
transmissor. O processo de estimar a fase e frequência de portadora é denominado
de recuperação de portadora.
Chamada também de sincronismo em frequência e/ou sincronismo de fase.
A geração de uma portadora no receptor com mesma frequência que a
portadora usada no transmissor é necessaria para detecção correta dos
sı́mbolos transmitidos, ou seja, é necessario sincronização em frequência;
Já o sincronismo de fase, é a necessidade da geração de uma mesma fase de
referência no receptor para a demodulação.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 21 / 27
Sincronismo de portadora
Presumindo o uso de detecção coerente,se a sinusóide de referência possuir a
mesma fase e frequência da portadora ambas as ondas se cruzam por zero ao
mesmo tempo.
Há diversos algoritmos para se realizar a recuperação de portadora, desde PLLs
(Phase-Lock-loop), até o algoritmo mais conhecido, como o de Costas Loop.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 22 / 27
Sincronismo
Sincronismo de Sı́mbolo
Sincronizador Early-Late
Sincronizador Mueller e Muller
Método de Gardner
Sincronismo de portadora
The Phase-Locked Loop (PLL)
The Costas Loop
Sincronismo de Frame
Frame Marker (pequeno padrão de bits que o transmissor injeta
periodicamente no fluxo de dados);
Barker Synchronization Codewords
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 23 / 27
Simulação - Sincronismo
Para α = 1 e sem ruı́do
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 24 / 27
Simulação - Sincronismo
Para α = 0.5 e sem ruı́do
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 25 / 27
Simulação - Sincronismo
Para α = 0.5 e Eb/No = 20 dB
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 26 / 27
Referências
SKLAR, Bernard. Digital communications. Upper Saddle River: Prentice Hall,
2001.
HAYKIN, Simon. Sistemas de comunicação. Bookman, 2004.
LATHI, B. P.; DING, Zhi. Sistemas de Comunicações Analógicos e Digitais
Modernos. LTC, Rio de Janeiro, 2012.
ABRANTES, Sı́lvio A. Introdução à sincronização em modulações digitais. Março
de, 2007.
GOLDSMITH, Andrea. Wireless communications. Cambridge university press,
2005.
Rogério Pereira Junior (Programa de Pós Graduação em Engenharia
Tarefa
Elétrica
5 - Comunicação
- UFSC) Digital May 11, 2017 27 / 27
Você também pode gostar
- Meu Livro Da Tabuada - AlunoDocumento206 páginasMeu Livro Da Tabuada - Alunolperini100% (3)
- Dia 01 - 21 Dias Com Espelho - Louise HayDocumento6 páginasDia 01 - 21 Dias Com Espelho - Louise HayMatheus Honorio100% (1)
- Encerramento Catequese 2012 2013Documento4 páginasEncerramento Catequese 2012 2013Catequese de Rendufinho67% (3)
- BiopreenchedoresDocumento41 páginasBiopreenchedoresJaine Padilla100% (1)
- Geometria Analítica e Álgebra VetorialDocumento212 páginasGeometria Analítica e Álgebra VetorialNadson Silva100% (2)
- Relatorio - Formas de Onda OfdmDocumento9 páginasRelatorio - Formas de Onda OfdmRogério PereiraAinda não há avaliações
- Diagrama Olho EquaDocumento27 páginasDiagrama Olho EquaRogério PereiraAinda não há avaliações
- Relatorio - Formas de Onda OfdmDocumento9 páginasRelatorio - Formas de Onda OfdmRogério PereiraAinda não há avaliações
- Seminario Final - OFDMDocumento40 páginasSeminario Final - OFDMRogério PereiraAinda não há avaliações
- Apresentação Ofdm EstiDocumento40 páginasApresentação Ofdm EstiRogério PereiraAinda não há avaliações
- Intercorrencias No Tratamento Dialitico (HD-TRAB GRUPO)Documento11 páginasIntercorrencias No Tratamento Dialitico (HD-TRAB GRUPO)FatianeSantosAinda não há avaliações
- Altura Do Joelho Com Medida ConfiavelDocumento10 páginasAltura Do Joelho Com Medida ConfiavelJizah Rios RiosAinda não há avaliações
- AULA - Desempenho em Voo Descendente PropulsionadoDocumento55 páginasAULA - Desempenho em Voo Descendente PropulsionadoGiuliano Gardolinski VensonAinda não há avaliações
- Quantidade de Capim CavaloDocumento3 páginasQuantidade de Capim CavalorodrigostizAinda não há avaliações
- Avaliação de Maquinas Modelo PDFDocumento11 páginasAvaliação de Maquinas Modelo PDFleandroAinda não há avaliações
- 4 - Relatorio - Ensaio de CompressãoDocumento14 páginas4 - Relatorio - Ensaio de CompressãoNicollas AlvesAinda não há avaliações
- 3ºano Eletrostática 1Documento27 páginas3ºano Eletrostática 1Maria ClaraAinda não há avaliações
- Coeficiente Global de Transferencia de CalorDocumento31 páginasCoeficiente Global de Transferencia de Calorjoao nunesAinda não há avaliações
- 04b Apostila de Psicomotricidade ApostilaDocumento45 páginas04b Apostila de Psicomotricidade ApostilaDebora LopesAinda não há avaliações
- Brugmansia Arborea, Datura StramoniumDocumento6 páginasBrugmansia Arborea, Datura StramoniumminhapicaAinda não há avaliações
- RELIGIÃODocumento300 páginasRELIGIÃONhynguyka AlmeidaAinda não há avaliações
- W - AméliaDocumento11 páginasW - AméliaDeogracio Possiano JaimeAinda não há avaliações
- Cartilha Prevencao PiolhosDocumento2 páginasCartilha Prevencao PiolhosMarcia Carini0% (1)
- Robin Jones Gunn - Série Selena 10 - Vá em Frente, SelenaDocumento165 páginasRobin Jones Gunn - Série Selena 10 - Vá em Frente, Selenaemanuellenlopes34Ainda não há avaliações
- Unidade 2 - Níveis de EstoqueDocumento33 páginasUnidade 2 - Níveis de EstoqueBruno EduardoAinda não há avaliações
- Cópia de Ética e Novas TecnologiasDocumento24 páginasCópia de Ética e Novas Tecnologiasrayanni.freireAinda não há avaliações
- Blue MerleDocumento4 páginasBlue MerleGisele PassosAinda não há avaliações
- Tunga - A Alquimia Como Arte - ISTOÉ Independente PDFDocumento4 páginasTunga - A Alquimia Como Arte - ISTOÉ Independente PDFNadam GuerraAinda não há avaliações
- Insight em PsiquiatriaDocumento10 páginasInsight em PsiquiatriaJúlia Maria Guimarães MatosAinda não há avaliações
- Catálogo de PeçasDocumento6 páginasCatálogo de PeçasMarcosAinda não há avaliações
- Primeiros Passos Na Fé Cristã PDFDocumento66 páginasPrimeiros Passos Na Fé Cristã PDFArlan SousaAinda não há avaliações
- Benefícios Da Prática Do VoleibolDocumento5 páginasBenefícios Da Prática Do VoleibolEDSON MATEUS INACIOAinda não há avaliações
- Caminhos SinuososDocumento198 páginasCaminhos SinuososMiguel JuniorAinda não há avaliações
- Relatório GRS Acari-RnDocumento32 páginasRelatório GRS Acari-RnRANIERE RYAN DE JESUS PEREIRA100% (1)
- Livro - Da Pesca Artesanal para Sua MesaDocumento59 páginasLivro - Da Pesca Artesanal para Sua MesaFabio RibeiroAinda não há avaliações