Você também pode gostar
- Manual 3bps CT 803 03 23 Trilingue 1Documento91 páginasManual 3bps CT 803 03 23 Trilingue 1Joseilton SouzaAinda não há avaliações
- Diagrama Unifilar 1: Medição TripDocumento2 páginasDiagrama Unifilar 1: Medição TripJoseilton SouzaAinda não há avaliações
- Resultados Experimentais Dos Ensaios Da Maquinas Assincronas 2020-2eDocumento38 páginasResultados Experimentais Dos Ensaios Da Maquinas Assincronas 2020-2eJoseilton SouzaAinda não há avaliações
- Material - Custo de Capital - Eng. EconômicaDocumento30 páginasMaterial - Custo de Capital - Eng. EconômicaJoseilton SouzaAinda não há avaliações
- Aula 01Documento29 páginasAula 01Joseilton SouzaAinda não há avaliações
- Anexo 8 - Curva 30 MinutosDocumento1 páginaAnexo 8 - Curva 30 MinutosJoseilton SouzaAinda não há avaliações
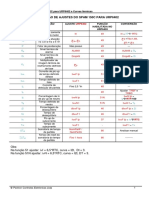
- Conversão de Ajustes Do Spam 150C para Urp6402Documento4 páginasConversão de Ajustes Do Spam 150C para Urp6402Joseilton SouzaAinda não há avaliações
- Exp - 05.2 - Lab. RemotoDocumento10 páginasExp - 05.2 - Lab. RemotoJoseilton SouzaAinda não há avaliações
- ANEXO 4 B3 - Exemplo Esquema de Ligação 640x - r02Documento1 páginaANEXO 4 B3 - Exemplo Esquema de Ligação 640x - r02Joseilton SouzaAinda não há avaliações
- Experimento Osciladores Senoidais - OPAMP - UFCG PROFESSOR GUTEMBERG LIRADocumento12 páginasExperimento Osciladores Senoidais - OPAMP - UFCG PROFESSOR GUTEMBERG LIRAMatheus LeorAinda não há avaliações
- Aula 9 Fourier Filtros Analise Sintese EspectralDocumento161 páginasAula 9 Fourier Filtros Analise Sintese EspectralJoseilton SouzaAinda não há avaliações
- PowerNET P600 G4 Catálogo PDocumento4 páginasPowerNET P600 G4 Catálogo PJoseilton SouzaAinda não há avaliações
- Legenda: URP1439TUDocumento2 páginasLegenda: URP1439TUJoseilton SouzaAinda não há avaliações
- Anexo 7 - Curva 20 MinutosDocumento1 páginaAnexo 7 - Curva 20 MinutosJoseilton SouzaAinda não há avaliações
- 08 CalibraçãoDocumento2 páginas08 CalibraçãoJoseilton SouzaAinda não há avaliações
- Aula 5 - CompetênciasDocumento12 páginasAula 5 - CompetênciasJoseilton SouzaAinda não há avaliações
- Anexo 6 - Curva 10 MinutosDocumento1 páginaAnexo 6 - Curva 10 MinutosJoseilton SouzaAinda não há avaliações
- Raizes MBDocumento85 páginasRaizes MBJoseilton SouzaAinda não há avaliações
- CN QuartaLista 2020 1eDocumento2 páginasCN QuartaLista 2020 1eJoseilton SouzaAinda não há avaliações
- Cnumconceitosbasicos 2Documento22 páginasCnumconceitosbasicos 2Joseilton SouzaAinda não há avaliações
- Osciladores Cristal Modulacao DigitalDocumento150 páginasOsciladores Cristal Modulacao DigitalJoseilton SouzaAinda não há avaliações
- CTRL Digital c3Documento19 páginasCTRL Digital c3Joseilton SouzaAinda não há avaliações
- CTRL Digital c2Documento17 páginasCTRL Digital c2Joseilton SouzaAinda não há avaliações
- CTRL Digital c4Documento13 páginasCTRL Digital c4Joseilton SouzaAinda não há avaliações
- Exp2 PIDDocumento11 páginasExp2 PIDJoseilton SouzaAinda não há avaliações
- CTRL Digital c8Documento8 páginasCTRL Digital c8Joseilton SouzaAinda não há avaliações
- Lista Exercicios Aula-22 Ressonante-ZVSDocumento5 páginasLista Exercicios Aula-22 Ressonante-ZVSJoseilton SouzaAinda não há avaliações
- Exercício Sobre Capítulo 1 Do Livro Criando Paisagens Do B. AbbudDocumento5 páginasExercício Sobre Capítulo 1 Do Livro Criando Paisagens Do B. AbbudIasmin MouraAinda não há avaliações
- ISB Sprinklers Conceitos BásicosDocumento146 páginasISB Sprinklers Conceitos BásicosSérgio GnipperAinda não há avaliações
- 02 - Avaliação FormativaDocumento2 páginas02 - Avaliação FormativacmtonioloAinda não há avaliações
- Lista de Exercícios Extra-Conversão de MedidasDocumento5 páginasLista de Exercícios Extra-Conversão de MedidasDanielle FernandesAinda não há avaliações
- Apostila Concreto & ArgamassaDocumento113 páginasApostila Concreto & ArgamassaJosenilton SobralAinda não há avaliações
- Análise Riscos - HAZOPDocumento27 páginasAnálise Riscos - HAZOPAntonioCarlosMontandonJúniorAinda não há avaliações
- Gerência de ManutençãoDocumento92 páginasGerência de ManutençãoHarleison SandersAinda não há avaliações
- Pedro LealDocumento2 páginasPedro LealVAN GOMPEL RAPHAinda não há avaliações
- Modelo - Relatório de Medição Malha de AterramentoDocumento5 páginasModelo - Relatório de Medição Malha de Aterramentolorrandres galvaoAinda não há avaliações
- Guia de Avaliaç o SBToolPT-HDocumento179 páginasGuia de Avaliaç o SBToolPT-HUzair Maqbool KhanAinda não há avaliações
- Escolha Do Tipo de Fundac3a7c3a3o Exercc3adcios PDFDocumento18 páginasEscolha Do Tipo de Fundac3a7c3a3o Exercc3adcios PDFLoret LIAinda não há avaliações
- 212 4civ83333tn Estr FtemDocumento2 páginas212 4civ83333tn Estr FtemYasmin MachadoAinda não há avaliações
- Eng +mecâDocumento1 páginaEng +mecâCarla Ives DantasAinda não há avaliações
- Proposta de Modelo Formação de Preço em Indusrias Sob EncomendaDocumento176 páginasProposta de Modelo Formação de Preço em Indusrias Sob EncomendaCassio GuideAinda não há avaliações
- Bolsas 2021 Lista AvaliadoresDocumento28 páginasBolsas 2021 Lista AvaliadoresSofia MoreiraAinda não há avaliações
- Bloco K - Guia de Referência - Linha Datasul v2Documento45 páginasBloco K - Guia de Referência - Linha Datasul v2Sérgio MuriloAinda não há avaliações
- Relatorio (Em Andamento) Centro Universitário Estácio de São LuísDocumento19 páginasRelatorio (Em Andamento) Centro Universitário Estácio de São LuísCaio FelipeAinda não há avaliações
- CDocumento62 páginasCNuno HenriquesAinda não há avaliações
- Turmas OfertadasDocumento18 páginasTurmas OfertadasMateus ArrudaAinda não há avaliações
- (AR1) - Avaliação Recuperativa 1Documento2 páginas(AR1) - Avaliação Recuperativa 1Josué SantosAinda não há avaliações
- Pronatec Operador de GuindasteDocumento214 páginasPronatec Operador de GuindasteDjalma Filho100% (1)
- Guia Mudanca Padrao 2Documento40 páginasGuia Mudanca Padrao 2Vinicius SakaiAinda não há avaliações
- GabaritosDocumento3 páginasGabaritosMiller A. ValerioAinda não há avaliações
- Compressibilidade Dos Solos - RoteiroDocumento16 páginasCompressibilidade Dos Solos - RoteiroAntonio Tavares Franca JuniorAinda não há avaliações
- A Forma Segue o Fiasco - Peter BlakeDocumento9 páginasA Forma Segue o Fiasco - Peter BlakeVanessa Ribeiro100% (2)
- Slide Aula 1 PDFDocumento97 páginasSlide Aula 1 PDFRenan NardoAinda não há avaliações
- Plano de ManutencaoDocumento2 páginasPlano de ManutencaoAlex OliveiraAinda não há avaliações
- Manual R-NS2Documento9 páginasManual R-NS2Diomar NetoAinda não há avaliações
- Processo de Desenvolvimento de SoftwareDocumento176 páginasProcesso de Desenvolvimento de Softwareregiscbarc100% (1)
- Avaliação Técnica de Um Carregador FlorestalDocumento14 páginasAvaliação Técnica de Um Carregador FlorestalsouseuAinda não há avaliações