Você também pode gostar
- Torção 2021Documento31 páginasTorção 2021Caio SilvaAinda não há avaliações
- TensoesDocumento49 páginasTensoesCaio SilvaAinda não há avaliações
- DeformacoesDocumento33 páginasDeformacoesCaio SilvaAinda não há avaliações
- Artigo 1Documento15 páginasArtigo 1Caio SilvaAinda não há avaliações
- Aula 05 - JJJDocumento21 páginasAula 05 - JJJEduardo SousaAinda não há avaliações
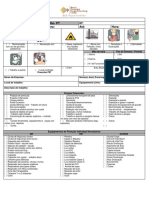
- PT Permissao de TrabalhoDocumento2 páginasPT Permissao de TrabalhoDiego RodriguesAinda não há avaliações
- EI 05 Circuitos Monofásicos e Trifásicos IIIDocumento35 páginasEI 05 Circuitos Monofásicos e Trifásicos IIIJose BatistaAinda não há avaliações
- Manual ThermasDocumento24 páginasManual ThermasKleber Alexander Tavares100% (3)
- 8º Ano Pet 6 Semana 3Documento10 páginas8º Ano Pet 6 Semana 3ElFoxy 13Ainda não há avaliações
- Vol7.Capsulas 2022Documento68 páginasVol7.Capsulas 2022Eliardo SousaAinda não há avaliações
- Comprovante de Endereco PDFDocumento1 páginaComprovante de Endereco PDFmarcosAinda não há avaliações
- g01 9 Enunciado e ResolucaoDocumento10 páginasg01 9 Enunciado e ResolucaoPaulo SilvaAinda não há avaliações
- Soldadura TIGDocumento26 páginasSoldadura TIGNuno PaulinoAinda não há avaliações
- Prova IME 2020 Química 1Documento19 páginasProva IME 2020 Química 1lucas bernardinoAinda não há avaliações
- Introdução À EngenhariaDocumento181 páginasIntrodução À EngenhariaThiago Laurindo 2Ainda não há avaliações
- Inversor SchneiderDocumento1 páginaInversor SchneiderGeraldo CarvalhoAinda não há avaliações
- Asvotec 2017 Inauguracao FlareDocumento53 páginasAsvotec 2017 Inauguracao FlarejpvissottoAinda não há avaliações
- Cap 4Documento70 páginasCap 4Bruno Costa Dos SantosAinda não há avaliações
- Materiais para Construção Mecanica (Senai)Documento51 páginasMateriais para Construção Mecanica (Senai)Arlan FN100% (5)
- NBR15220 2Documento40 páginasNBR15220 2edimonteiroAinda não há avaliações
- Aap2 - Cálculo Diferencial e Integral IIIDocumento3 páginasAap2 - Cálculo Diferencial e Integral IIIEnderson PedrozaAinda não há avaliações
- PROVA I ManutençãoDocumento3 páginasPROVA I ManutençãoJosé Wilson CasqueiroAinda não há avaliações
- Tabela AnsiDocumento6 páginasTabela AnsiGilberto FigueiredoAinda não há avaliações
- Catalogo DELTA SPLITAO - CC-DSPL-09202101Documento2 páginasCatalogo DELTA SPLITAO - CC-DSPL-09202101Júlio César BarrosAinda não há avaliações
- 3Z0006RH 00 Manual Da Máquina de Tração ER2-3Documento23 páginas3Z0006RH 00 Manual Da Máquina de Tração ER2-3Edwin Gonzalez0% (1)
- Catalogo Da Electro CangakofeDocumento4 páginasCatalogo Da Electro CangakofeDemítrio G. PioAinda não há avaliações
- Processos Conformação LaminaçãoDocumento90 páginasProcessos Conformação LaminaçãojoseAinda não há avaliações
- PeneirosASTM NP1379Documento1 páginaPeneirosASTM NP1379Carlos Jorge Gomes FrançaAinda não há avaliações
- Respostas Da Parcial Do 1ºbimestreDocumento4 páginasRespostas Da Parcial Do 1ºbimestremarcio vianaAinda não há avaliações
- Trigonometria PDFDocumento15 páginasTrigonometria PDFlgfalcaoAinda não há avaliações
- Problemas de EletricidadeDocumento8 páginasProblemas de EletricidadeScribdTranslationsAinda não há avaliações
- Fisica 2012 12a Classe 2a EpocaDocumento8 páginasFisica 2012 12a Classe 2a EpocaAnildaAinda não há avaliações
- Proposta Pato CoelhoDocumento7 páginasProposta Pato CoelhoFabiana BezerraAinda não há avaliações
- DM030964 PBDocumento8 páginasDM030964 PBFrancisco Mendes Barros NetoAinda não há avaliações
- Análise do Comportamento Aplicada ao Transtorno do Espectro AutistaNo EverandAnálise do Comportamento Aplicada ao Transtorno do Espectro AutistaNota: 4.5 de 5 estrelas4.5/5 (13)
- Trading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNo EverandTrading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaNota: 5 de 5 estrelas5/5 (1)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Administração da Tecnologia de Informação e Comunicação: Da Informática Básica à Gestão do ConhecimentoNo EverandAdministração da Tecnologia de Informação e Comunicação: Da Informática Básica à Gestão do ConhecimentoNota: 5 de 5 estrelas5/5 (1)
- Guia Definitivo Para Dominar o Bitcoin e as CriptomoedasNo EverandGuia Definitivo Para Dominar o Bitcoin e as CriptomoedasNota: 4 de 5 estrelas4/5 (5)
- 37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNo Everand37 Regras para um Negócio Online de Sucesso: Como Desistir do Seu Emprego, Mudar Para o Paraíso e Ganhar Dinheiro Enquanto DormeNota: 1.5 de 5 estrelas1.5/5 (2)
- Lean Game Development: Desenvolvimento enxuto de jogosNo EverandLean Game Development: Desenvolvimento enxuto de jogosAinda não há avaliações
- Orientação profissional: A abordagem sócio-históricaNo EverandOrientação profissional: A abordagem sócio-históricaNota: 5 de 5 estrelas5/5 (2)
- Blockchain Ethereum: Fundamentos de arquitetura, desenvolvimento de contratos e aplicaçõesNo EverandBlockchain Ethereum: Fundamentos de arquitetura, desenvolvimento de contratos e aplicaçõesAinda não há avaliações
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Fundamentos de Segurança da Informação: com base na ISO 27001 e na ISO 27002No EverandFundamentos de Segurança da Informação: com base na ISO 27001 e na ISO 27002Nota: 5 de 5 estrelas5/5 (8)