Escolar Documentos
Profissional Documentos
Cultura Documentos
Aula 2 e 3valoi 2016
Enviado por
Vanil Moises ArmandoTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Aula 2 e 3valoi 2016
Enviado por
Vanil Moises ArmandoDireitos autorais:
Formatos disponíveis
Universidade Zambeze Disciplina: Física I
Lição n0 2 e 3: Cinemática do
Faculdade de Ciência e Tecnologia Ponto Material
Cursos: Engrias, Mecatrónica e Processos Ano 2016 Primeiro Semestre
Docente Responsável: Enfraime Jaime Valoi
Aulas Teóricas
Subtemas:
Definição da cinemática Componentes Tangencial e Normal da Aceleração
Conceito de Movimento Movimento Circular,
Movimento
Mecânica Rectilíneo
como ciência Componentes Radial e Transversal
Movimento Curvilíneo Movimento de um Projéctil
II. 1 Definição
Cinemática é o ramo da física que se dedica ao estudo do movimento dos corpos sem se preocupar
com as causas desse movimento.
II.2 Conceito de Movimento
Um corpo está em movimento relativamente a um outro, quando sua posição medida com relação
ao segundo, varia com o tempo, e, quando sua posição relativa não varia com o tempo, diz-se que
o corpo está em repouso. Esta é a razão pela qual repouso e movimento são entendidos como
conceitos relativos, isto porque dependem da escolha do corpo que servirá de referencial, por
exemplo, uma árvore e uma casa estão em repouso relativo a Terra e em movimento relativo ao
sol.
Contudo, para descrever o movimento, é importante que o observador defina um sistema de
referência ou referencial em relação ao qual o movimento é analisado.
II.3 Movimento
II.3.1 Posição e Deslocamento
A posição de uma partícula pode ser definida relativamente a um referencial através de um vector
⃗⃗, ou simplesmente por 𝑟⃗ = 𝑥𝑖⃗, se o movomento for rectilíneo conicidente
posição 𝑟⃗ = 𝑥𝑖⃗ + 𝑦𝑗⃗ + 𝑧𝑘
com o eixo 𝑜𝑥.
Entende-se por deslocamento, à variação da posição da partícula durante um certo intervalo de
tempo, isto é, o delocamento é dado pela diferença da posição final e inicial da partícula.
Neste tema nos interessa estudar movimentos, rectilíneo, curvilíneo e circular de uma partícuca.
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 1
II.3.2 Movimento Rectilíneo
O movimento de um corpo é rectilíneo quando a sua trajectória é uma linha recta.
II.4.1 Velocidade
Para estudar a velocidade, vamos considerar o eixo OX, coincidente com a trajectória da partícula
(figura 2.1).
∆𝑥 Instante inicial 𝑡: 𝑥 = 𝑂𝐴 e final 𝑡 ′ : 𝑥 ′ = 𝑂𝐵, então a
𝑖⃗ A B velocidade média será,
𝑋
O 𝑥 𝑣⃗ 𝑥′
𝑥 ′ − 𝑥 ∆𝑥
Figura 2.1 Movimento Rectilíneo 𝑣𝑚𝑒𝑑 = = (2.1)
𝑡′ − 𝑡 ∆𝑡
Onde, ∆𝑥 = 𝑥 ′ − 𝑥 − 𝑑𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜 𝑒 ∆𝑡 − 𝑡𝑒𝑚𝑝𝑜 𝑑𝑒𝑐𝑜𝑟𝑟𝑖𝑑𝑜
Em princípio, o deslocamento pode ser relacionado com o tempo por meio de uma relação
funcional, 𝑥 = 𝑓(𝑡)
A velocidade média durante um certo intervalo de tempo é igual ao deslocamento médio
por unidade do tempo durante um interval de tempo.
Pretendendo definir a velocidade instantânea em um ponto qualquer, por exemplo A, faz-se o
intervalo de tempo ∆𝑡 tão pequeno possivel, para que não ocorram variações essenciais no estado
do movimento durante esse intervalo.
∆𝑥
Em linguagem matemática, escrevemos: 𝑣 = lim 𝑣𝑚𝑒𝑑 = lim , que é a derivada de x em
∆𝑡→𝑜 ∆𝑡→0 ∆𝑡
𝑑𝑥
relação ao tempo, isto é, 𝑣 = (2.2)
𝑑𝑡
. A velocidade instantânea é obtida pelo cálculo da derivada do deslocamento em relação ao
tempo
O termo velocidade será muitas vezes empregue para referir-se a velocidade instantânea.
Conhecendo 𝑣 = 𝑓(𝑡), a posiçao X, pode ser optida por integração da relação (2.2), o que resulta,
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 2
𝑥 𝑡 𝑡
∫ 𝑑𝑥 = ∫ 𝑣𝑑𝑡 ↔ 𝑥 = 𝑥0 + ∫ 𝑣𝑑𝑡 (2.3)
𝑥0 𝑡0 𝑡0
O deslocamento dx pode ser positivo ou negativo, dependendo do sentido do movimento, isto é,
+𝑜𝑥 𝑒 − 𝑜𝑥.
II.4.2 Aceleração
Ao falar de aceleração num movimento rectilíneo, estamos a falar da aceleração tangencial,
responsável pela variação do módulo da velocidade. Em geral a velocidade de um corpo é uma
função de tempo. Suponhamos que na figura 2.1, no instante t o objecto está em A, com a
velocidade v, e, no instante t’ ele está em B com v’, então a aceleração média entre A e B, será,
𝑣 ′ − 𝑣 ∆𝑣
𝑎𝑚𝑒𝑑 = ′ = (2.4)
𝑡 −𝑡 ∆𝑡
Por analogia à velocidade, para ∆𝑡 pequeno, a aceleração instantânea tem a forma,
𝑑𝑣
𝑎= (2.5)
𝑑𝑡
A aceleração instantânea é obtida pelo cálculo da derivada temporal da velocidade
O termo aceleração passará a significar aceleração instantânea. Em geral ela varia durante o
movimento. Se o módulo da velocidade aumenta com o tempo, o movimento é considerado
acelerado e, se ela decresce com o tempo em valor absoluto, o movimento é considerado
retardado.
Exercício de Aplicação (exercício 2 da ficha 2)
(*) O movimento de um ponto material é definido pela relação 𝑋(𝑡) = 2𝑡 4 − 3𝑡 3 + 𝑡, onde X é expresso em metros
e t em segundos. Determinar a velocidade e aceleração no instante 3 s.
Resolução:
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 3
Primeiro vamos encontrar as expressões de velocidade e aceleração para um instante qualquer, depois iremos substituir
para o instante 3 s.
𝑑𝑥 𝑑
De relações (2.2) e (2.5), tem-se que, 𝑣(𝑡) = = 𝑑𝑡 (2𝑡 4 − 3𝑡 3 + 𝑡) = 8𝑡 3 − 9𝑡 2 + 1
𝑑𝑡
𝑑𝑣 𝑑
𝑎(𝑡) = = (8𝑡 3 − 9𝑡 2 + 1 ) = 24𝑡 2 − 18𝑡
𝑑𝑡 𝑑𝑡
No instante 3 s, temos, 𝑣(3) = 8. 33 − 9. 32 + 1 = 136𝑚/𝑠 𝑒 𝑎(3) = 24. 32 − 18.3 = 162𝑚/𝑠 2
Conhecendo a aceleração, relação (2.5), por via de integração podemos calcular a velocidade,
𝑣 𝑡 𝑡
∫ 𝑑𝑣 = ∫ 𝑎𝑑𝑡 ↔ 𝑣 = 𝑣0 + ∫ 𝑎𝑑𝑡 (2.6)
𝑣0 𝑡0 𝑡0
A relação entre a aceleração e a posição pode ser obtida pela combinação das equações (2.2) e
(2.5), resultando em,
𝑑𝑣 𝑑 𝑑𝑥 𝑑2 𝑥
𝑎= = ( )= 2 (2.7)
𝑑𝑡 𝑑𝑡 𝑑𝑡 𝑑𝑡
Para além da relação (2.7), outra importante relação entre a posição e a velocidade pode ser obtida
a partir da relação 𝑑𝑣 = 𝑎𝑑𝑡, multiplicando ambos os membros pela relação (2.2), isto é,
𝑑𝑥 𝑑𝑥
𝑑𝑣 =𝑎 𝑑𝑡 ↔ 𝑣𝑑𝑣 = 𝑎𝑑𝑥 (2.8)
𝑑𝑡 𝑑𝑡
𝑣 𝑥 𝑥 𝑥
1 2 1 2
∫ 𝑣𝑑𝑣 = ∫ 𝑎𝑑𝑥 → 𝑣 − 𝑣0 = ∫ 𝑎𝑑𝑥 ↔ 𝑣 2 = 𝑣0 2 + 2 ∫ 𝑎𝑑𝑥 (2.9)
𝑣0 𝑥0 2 2 𝑥0 𝑥0
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 4
II.5 Movimento Curvilíneo
II.5.1 Velocidade
Considerando a figura 2.2, nos instantes,
𝑍 inicial 𝑡: 𝑟⃗ = ̅̅̅̅ ⃗⃗ (𝑎)
𝑂𝐴 = 𝑥𝑖⃗ + 𝑦𝑗⃗ + 𝑧𝑘
𝐴 ∆𝑟 𝐵 𝑣𝑚𝑒𝑑 ⃗⃗ (𝑏)
̅̅̅̅ = 𝑥′𝑖⃗ + 𝑦′𝑗⃗ + 𝑧′𝑘
final 𝑡′: 𝑟⃗′ = 𝑂𝐵
𝑟 𝑟′ O movimento é pelo arco 𝐴𝐵 = ∆𝑠, mas o deslocamento é
o vector ∆𝑟.
𝑂
Onde, ∆𝑟⃗ = 𝑟 ′ − 𝑟 = 𝑖⃗(𝑥 ′ − 𝑥) + 𝑗⃗(𝑦 ′ − 𝑦) + 𝑘⃗⃗ (𝑧 ′ − 𝑧)
𝑋 𝑌
Figura 2.2 Deslocamento do ponto ∆𝑟⃗ = ∆𝑥𝑖⃗ + ∆𝑦𝑗⃗ + ∆𝑧𝑘⃗⃗ (2.10)
∆𝑟⃗ ∆𝑥 ∆𝑦 ∆𝑧
Para a velocidade média temos, 𝑣⃗𝑚𝑒𝑑 = ⃗⃗
(𝑎), ou 𝑣𝑚𝑒𝑑 = 𝑖⃗ ∆𝑡 + 𝑗⃗ ∆𝑡 + 𝑘 (𝑏) (2.11) e
∆𝑡 ∆𝑡
∆𝑟⃗ 𝑑𝑟⃗
a instantânea na forma, lim 𝑣⃗𝑚𝑒𝑑 = lim (𝑎), 𝑜𝑢 𝑣= (𝑏) (2.12)
∆𝑡→0 ∆𝑡→0 ∆𝑡 𝑑𝑡
Ainda podemos encontrar as componentes da velocidade bem como o seu módulo, se
combinarmos as equações (2.11b) e (2.12b), que resultam em,
𝑑𝑥 𝑑𝑦 𝑑𝑧 𝑑𝑥 𝑑𝑦 𝑑𝑧
𝑣 = 𝑖⃗ ⃗⃗
+ 𝑗⃗ + 𝑘 (2.13) 𝑒 𝑣𝑥 = , 𝑣𝑦 = 𝑒 𝑣𝑧 = (2.14)
𝑑𝑡 𝑑𝑡 𝑑𝑡 𝑑𝑡 𝑑𝑡 𝑑𝑡
|𝑣| = √𝑣𝑥 2 + 𝑣𝑦 2 + 𝑣𝑧 2 (2.15)
II.5.2 Aceleração
No movimento curvilíneo, a velocidade em geral varia tanto em módulo como em direcção.
⃗⃗
𝑑𝑣 𝑑2 𝑟
𝑎⃗ = (2.16), 𝑜𝑢 𝑎⃗ = ⃗⃗ , então a sua derivada será, 𝑑𝑣⃗ =
(2.17). Se 𝑣⃗ = 𝑣𝑥 𝑖⃗ + 𝑣𝑦 𝑗⃗ + 𝑣𝑧 𝑘
𝑑𝑡 𝑑𝑡 2
𝑑𝑣𝑥 𝑑𝑣𝑦 𝑑𝑣𝑧
⃗⃗, logo, 𝑎⃗ = 𝑖⃗
𝑑𝑣𝑥 𝑖⃗ + 𝑑𝑣𝑦 𝑗⃗ + 𝑑𝑣𝑧 𝑘 + 𝑗⃗ ⃗⃗
+𝑘 (2.18), e
𝑑𝑡 𝑑𝑡 𝑑𝑡
𝑑𝑣𝑥 𝑑2𝑥 𝑑𝑣𝑦 𝑑2𝑦
𝑎𝑥 = , 𝑜𝑢 𝑎𝑥 = 2 (2.19) 𝑎𝑦 = , 𝑜𝑢 𝑎𝑦 = 2 (2.20)
𝑑𝑡 𝑑𝑡 𝑑𝑡 𝑑𝑡
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 5
𝑑𝑣𝑧 𝑑2𝑧
𝑎𝑧 = , 𝑜𝑢 𝑎𝑧 = 2 (2.21) 𝑒 𝑜 𝑚ó𝑑𝑢𝑜𝑙𝑜 𝑐𝑜𝑚𝑜, |𝑣| = √𝑎𝑥 2 + 𝑎𝑦 2 + 𝑎𝑧 2 (2.22)
𝑑𝑡 𝑑𝑡
É importante salientar que no movimento curvilíneo, as coordenadas da partícula móvel são
funções de tempo e, são dadas pelas equações, 𝑥 = 𝑥(𝑡), 𝑦 = 𝑦(𝑡) 𝑒 𝑧 = 𝑧(𝑡) (2.23) e 𝑎𝑥 =
𝑎𝑥 (𝑡), 𝑎𝑦 = 𝑎𝑦 (𝑡) 𝑒 𝑎𝑧 = 𝑎𝑧 (𝑡) (2.24)
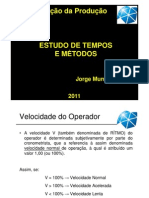
II.5.2.1 Componentes Tangencial e Normal da Aceleração
Quando uma partícula se move em uma curva, o módulo da velocidade pode variar, e, essa variação
está relacionada com a aceleração tangencial (𝑎 𝑇 ). De outro lado, durante o movimento a direcção
da velocidade também varia, e, essa variação é graças a aceleração normal (𝑎𝑁 ).
𝑎𝑇 𝑣
A afirmação anterior permite-nos chegar ao significado físico 𝑇
das componentes:
𝑎𝑁 - responsável pela variação na direcção da velocidade 𝑎𝑁 𝑎
𝑎 𝑇 - responsável pela variação do módulo da velocidade, onde,
𝑑𝑣 𝑣2 Figura 2.3 Partícula numa Curva
𝑎⃗ = 𝑢
⃗⃗ 𝑇 𝑑𝑡 + 𝑢
⃗⃗𝑁 (2.25)
𝜌
Os coeficientes 𝑢𝑇 𝑒 𝑢𝑁 , são vectores unitários (também denominados versores) na diracção
tangecial e normal à trajectória, e nquanto 𝜌 é o raio da trajectória. O primeiro termo da relação
(2.25), está relacionado com a variação do módulo da velocidade, e, como foi colocado
anteriormente, o termo corresponde a aceleração tangencial, enquanto o segundo, está relacionado
com a variação da direcção da velocidade, por isso, corresponde a aceleração normal, isto é,
𝑑𝑣 𝑣2
𝑎𝑁 = (2.26) 𝑎𝑁 = (2.27)
𝑑𝑡 𝜌
Contudo, conhecendo o valor das componentes 𝑎 𝑇 𝑒 𝑎𝑁 , podemos calcular o módulo da
aceleração pela fórmula,
2
𝑣2 𝑑𝑣 2
|𝑎⃗| = √𝑎𝑁 + 𝑎 𝑇
2 2 = √( ) + ( ) (2.28)
𝜌 𝑑𝑡
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 6
II.6 Movimento Circular
Quando a trajectória descrita por uma partícula for circular ou quando o raio da mesma trajectória
é constante, o movimento é demominado circular, figura 2.4.
É importante salientar que as grandezas até agora utilizadas, de deslocamento, posição, velocidade
e de aceleração, eram úteis quando o objetivo era descrever movimentos lineares, mas na análise
de movimentos circulares, devemos introduzir novas grandezas, que são chamadas grandezas
angulares, medidas sempre em radianos, são elas, o deslocamento angular (∆𝜃), a posição angular
(𝜃), a velocidade angular (ω) e a aceleração angular (α).
II.6.1 Velocidade Angular
A velocidade angular é uma grandeza vectorial com direcção normal
𝑧
ao plano do movimento e o sentido encontrado aplicando a regra da
𝜔
⃗⃗ mão direita, figura 2.4.
𝑆
𝜃 = 𝑅 → 𝑺 = 𝑹𝜽 (2.29) e ∆𝜽 = 𝜽′ − 𝜽 (2.30) e por analogia a
𝑦
𝜃 R velocidade linear, para angular resulta,
𝑣⃗
𝑥 𝑆
∆𝜽 ∆𝜃 𝒅𝜽
Figura 2.4 Movimento Circular ⃗⃗⃗⃗𝒎𝒆𝒅 =
𝝎 ,𝑒 𝜔
⃗⃗ = lim 𝜔𝑚𝑒𝑑 = lim ⃗⃗⃗⃗ =
, 𝑖𝑠𝑡𝑜 é, 𝝎 (2.31)
∆𝒕 ∆𝑡→0 ∆𝑡→0 ∆𝑡 𝒅𝒕
Nota: A velocidade angular é uma grandeza vectorial com direcção normal ao plano do
movimento e sentido dado pela regra da mão direita (ver a figura 2.4).
𝑑𝑆 𝑑𝜃
Derivando (2.29) em função ao tempo, tem-se, 𝑑𝑡 = 𝑅 𝑑𝑡 (2.32), e ao substituir (2.31) em (2.32),
e levando em conta a definição da velocidade, resulta,
𝒗 = 𝑹. 𝝎 (𝒂) 𝑆𝑒 𝑟 ≠ 0, 𝑅 = 𝑟𝑠𝑒𝑛𝛿 ↔ 𝑣 = 𝑟𝑥𝜔
⃗⃗ (𝒃) (2.33)
Onde, 𝑟 −é o vector que nos dá a posição onde o corpo executa o movimento, na figura 2.4, 𝑟 =
(0,0,0)
Para um movimento circular uniforme, 𝜔 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒,isto é, periódico, a partícula passa em cada
ponto da circunferência a intervalos regulares de tempo. Se durante um intervalo de tempo t,
ocorrem n revoluções, então podemos definir o período (𝑃) e a frequência (𝑓) pela relação,
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 7
𝑡 𝑛 1
𝑃= (2.34) 𝑒 𝑓 = = (2.35)
𝑛 𝑡 𝑃
O período (P) é o intervalo de tempo ao fim do qual as características posição, vector velocidade
e vector aceleração se repetem. Enquanto a frequência (𝑓) de um movimento circular uniforme é
o número de voltas por unidade de tempo que a partícula descreve.
Para encontrarmos a expressão da posição angular, levando em consideração que o movimento é
circular uniforme (𝜔 = 𝑐𝑜𝑛𝑠𝑡), integramos a relação (2.31), obtendo,
𝜃 𝑡
∫ 𝑑𝜃 = ∫ 𝜔 𝑑𝑡 ↔ 𝜃 = 𝜃0 + 𝜔(𝑡 − 𝑡0 ) (2.36)
𝜃0 𝑡0
Se a partícula parte da posição inicial e instante inicial iguais a zero (𝜃0 = 0 𝑟𝑎𝑑 𝑒 𝑡0 = 0𝑠),
respectivamente, então a relação anterior toma a forma,
𝜃 2𝜋
𝜃 = 𝜔𝑡 𝑜𝑢 𝜔 = (2.37), 𝑠𝑒 𝜃 = 2𝜋 𝑒 𝑡 = 𝑃, 𝑒𝑛𝑡ã𝑜, 𝜔 = = 2𝜋𝑓 (2.38)
𝑡 𝑃
II.6.2 Aceleração Angular
Quando a velocidade angular varia com o tempo, a aceleração angular é definida pelo vector,
𝑑𝜔⃗⃗ 𝑑2𝜃
𝛼⃗ = (2.39) 𝑜𝑢 𝛼 = 2 (2.40)
𝑑𝑡 𝑑𝑡
Agora se a partícula parte do repouso (𝜔0 = 0) no instante inicial (𝑡0 = 0)e descreve o
movimento uniformemente variado (𝛼 = 𝑐𝑜𝑛𝑠𝑡. ), podemos definir a velocidade angular pela
relação,
𝜔 𝑡
∫ 𝑑𝜔 = ∫ 𝛼 𝑑𝑡, 𝜔 = 𝜔0 + 𝛼(𝑡 − 𝑡0 ) (2.41) ↔ 𝜔 = 𝛼𝑡 (2.42)
𝜔0 𝑡0
Visto que o movimento em análise é variado, então, ao substituir a relação (2.31) em (2.41),
obtem-se,
𝜃 𝑡 𝑡
𝑑𝜃
= 𝜔0 + 𝛼(𝑡 − 𝑡0 ) → ∫ 𝑑𝜃 = ∫ 𝜔0 𝑑𝑡 + 𝛼 ∫ (𝑡 − 𝑡0 ) 𝑑𝑡
𝑑𝑡 𝜃0 𝑡0 𝑡0
1
𝜃 = 𝜃0 + 𝜔0 (𝑡 − 𝑡0 ) + 𝛼(𝑡 − 𝑡0 )2 (2.43)
2
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 8
II.5.3 Componentes Radial e Transversal
𝑑𝑟
Visto que, 𝑣 = , e, se levarmos em consideração um versor 𝑢𝑟 (vector unitário na direcção de
𝑑𝑡
𝑑 𝑑𝑟⃗ 𝑑𝑢𝑟
r), então, 𝑟⃗ = 𝑢𝑟 𝑟⃗, logo, 𝑣 = 𝑑𝑡 (𝑢𝑟 . 𝑟⃗) = 𝑢𝑟 . 𝑑𝑡 + . 𝑟⃗ (2.44).
𝑑𝑡
𝑑𝑢𝑟 𝑑𝜃
Se 𝑢𝑟 = 𝑢𝑥 𝑐𝑜𝑠𝜃 + 𝑢𝑦 𝑠𝑒𝑛𝜃 𝑒 𝑢𝜃 = −𝑢𝑥 𝑠𝑒𝑛𝜃 + 𝑢𝑦 𝑐𝑜𝑠𝜃 (2.45), então, = 𝑢𝜃 (2.46)
𝑑𝑡 𝑑𝑡
𝑑𝑟⃗ 𝑑𝜃
De relação (2.44) temos, 𝑣 = 𝑢𝑟 . 𝑑𝑡 + 𝑢𝜃 . 𝑟⃗ (2.47)
𝑑𝑡
𝑑𝑟 𝑑𝜃
Velocidade radial 𝑣𝑟 = (2.48) e velocidade transversal, 𝑣𝑇 = 𝑟. 𝑑𝑡 (2.49)
𝑑𝑡
Exercício de Aplicação
(*) Um corpo inicialmente em repouso (𝜃 = 0 𝑒 𝜔 = 0, 𝑝𝑎𝑟𝑎 𝑡 = 0), é acelerado numa trajectória circular de raio
1,3m, segundo a equação 𝛼 = 120𝑡 2 − 48𝑡 + 16. Determinar a velocidade angular e a posição angular do corpo como
função do tempo.
Resolução:
Integrando a definição de aceleração angular (2.39), levando em conta as condições iniciais, para a velocidade, temos,
𝜔 𝑡
∫0 𝑑𝜔 = ∫0 (120𝑡 2 − 48𝑡 + 16)𝑑𝑡 ↔ 𝜔(𝑡) = 40𝑡 3 − 24𝑡 2 + 16𝑡
Ainda por de integração, relação (2.31), para a posição angular resulta,
𝜃 𝑡
∫0 𝑑𝜃 = ∫0 (40𝑡 3 − 24𝑡 2 + 16𝑡) 𝑑𝑡 ↔ 𝜃(𝑡) = 10𝑡 4 − 8𝑡 3 + 8𝑡 2
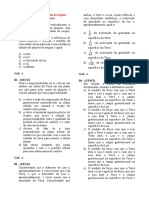
II.6 Movimento de um Projéctil
O movimento efectuado por um projéctil descreve uma trajectória plana em forma de uma
parábola. Durante este movimento, o projéctil executa, um movimento rectilíneo uniforme na
direcção horizontal (eixo OX) e movimento rectilíneo uniformemente variado na direcção vertical
(eixo OY), ver a figura 2.5
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 9
É importante salientar que durante o nosso estudo, desprezaremos a resistência do ar, e
consideraremos apenas à acção da gravidade (𝑔⃗), com direcção vertical e é dirigido de cima para
baixo.
Equações que caracterizam o movimento:
𝑜𝑥: 𝑥(𝑡) = 𝑣𝑜𝑥 𝑡 (2.50)
{ 1
𝑜𝑦: 𝑦(𝑡) = 𝑦0 + 𝑣𝑜𝑦 𝑡 − 𝑔𝑡 2 (2.51)
2
Ymax
𝑜𝑥: 𝑣𝑥 = 𝑣0𝑥 (2.52)
{
𝑜𝑦: 𝑣𝑦 = 𝑣𝑜𝑦 − 𝑔𝑡 (2.53)
𝑜𝑥: 𝑣0𝑥 = 𝑣0 . 𝑐𝑜𝑠𝛼 (2.54)
{
R=X 𝑜𝑦: 𝑣0𝑦 = 𝑣0 𝑠𝑒𝑛𝛼 (2.55)
Figura 2.5 Movimento de Projétil
Usando as equações anteriores, vamos determinar:
10 Tempo para alcançar a altura maxima (𝑣𝑦 = 0)
𝑣𝑜𝑦 𝒗𝟎 𝒔𝒆𝒏𝜶
𝑣𝑜𝑦 − 𝑔𝑡 = 0 → 𝑡 = ↔𝒕= (2.56)
𝑔 𝒈
20 Altura máxima (substituindo (2.56) em (2.51) para 𝑦0 = 0)
𝑣0 𝑠𝑒𝑛𝛼 1 𝑣0 2 𝑠𝑒𝑛2 𝛼 𝑣0 2 𝑠𝑒𝑛2 𝛼
𝑦𝑚𝑎𝑥 = 𝑣0 𝑠𝑒𝑛𝛼. − ↔ 𝑦𝑚𝑎𝑥 = (2.57)
𝑔 2 𝑔2 2𝑔
30 Tempo de Trânsito ou tempo para o projéctil voltar ao nível do solo (𝑦 = 0, 𝑦0 = 0)
𝑔𝑡 2 2𝑣𝑜𝑦 2𝑣0 𝑠𝑒𝑛𝛼
𝑣𝑜𝑦 𝑡 = →𝑡= ↔𝑡= (2.58)
2 𝑔 𝑔
40 Alcance (substituimos a relação (2.58) em (2.50)
2𝑣0 𝑠𝑒𝑛𝛼 2𝑣0 𝑠𝑒𝑛𝛼 𝑣0 2 𝑠𝑒𝑛2𝛼
𝑅 = 𝑥 = 𝑣𝑜𝑥 = 𝑣0 𝑐𝑜𝑠𝛼 ↔ 𝑅=𝑥= (2.59)
𝑔 𝑔 𝑔
Exercício de Aplicação
(*) Um projéctil é disparado num ângulo de 35⁰ com a horizontal. Ele atinge o solo a 4km do ponto de disparo. Determine:
a) a velocidade inicial, b) o tempo de trânsito do projéctil, c) a altura máxima, d) a velocidade no ponto de altura máxima.
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 10
Resolução:
Nota que somos fornecidos, o ângulo de desparo (𝛼 = 350 ), bem como o alcance máximo (𝑅 = 4𝑘𝑚), logo,
a) Usando a definição do alcance (2.59), podemos determinar a velocidade inicial, isto é,
𝑔𝑅 10.4000
𝑣0 = √( ) = √( ) ≅ 203𝑚/𝑠
𝑠𝑒𝑛2𝛼 𝑠𝑒𝑛2. 350
b) Para o tempo de trânsito, de relação (2.58), tem-se,
2𝑣0 𝑠𝑒𝑛𝛼 2.203. 𝑠𝑒𝑛350
𝑡= = ≅ 23𝑠
𝑔 10
c) Para altura máxima (2.57), temos,
𝑣0 2 𝑠𝑒𝑛2 𝛼 2032 𝑠𝑒𝑛2 350
𝑦𝑚𝑎𝑥 = = ≅ 678𝑚
2𝑔 2.10
d) A velocidade na altura máxima é dada pela componente 𝑣𝑥 , porque, 𝑣𝑦 = 0, dai que, de (2.52), tem-se,
𝑣 = 𝑣𝑥 = 𝑣𝑜𝑥 = 𝑣0 𝑐𝑜𝑠𝛼 = 203. 𝑐𝑜𝑠350 =≅ 116𝑚/𝑣
Dr Enfraime Jaime Valoi, valoi.enfraime@gmail.com Page 11
Você também pode gostar
- Ficha de Exercicios 202Documento9 páginasFicha de Exercicios 202Vanil Moises ArmandoAinda não há avaliações
- Aula 6 Valoi 2 2020Documento9 páginasAula 6 Valoi 2 2020Vanil Moises ArmandoAinda não há avaliações
- Manual de Apoio Aula 4Documento18 páginasManual de Apoio Aula 4Vanil Moises ArmandoAinda não há avaliações
- InopDocumento4 páginasInopVanil Moises ArmandoAinda não há avaliações
- 2013 Lancamento Obliquo AvancadoDocumento5 páginas2013 Lancamento Obliquo AvancadoAnderson EduardoAinda não há avaliações
- Lista 3 CVE PDFDocumento4 páginasLista 3 CVE PDFthaliaAinda não há avaliações
- Lista de Exercícios 4 PDFDocumento4 páginasLista de Exercícios 4 PDFPascom ItingaAinda não há avaliações
- Mod 02 Movimento Circular Uniforme 3pvDocumento3 páginasMod 02 Movimento Circular Uniforme 3pvMariana VieiraAinda não há avaliações
- Leis de NewtonDocumento81 páginasLeis de Newtonanon_351809649Ainda não há avaliações
- DissertationDocumento226 páginasDissertationMiguelAinda não há avaliações
- Mecânica GeralDocumento29 páginasMecânica GeralLeticiaAinda não há avaliações
- Capítulo 3 - MRU e MRUA (Teoria)Documento28 páginasCapítulo 3 - MRU e MRUA (Teoria)Joaquim Guerreiro MarquesAinda não há avaliações
- Cad.02 F1TetraDocumento39 páginasCad.02 F1TetraThiago de Paula e SilvaAinda não há avaliações
- Aula 3 Dinamica de Particula Metodo de Trabalho Energia e Implso Quantidade de Movimento PDFDocumento10 páginasAula 3 Dinamica de Particula Metodo de Trabalho Energia e Implso Quantidade de Movimento PDFKeven Gonçalves100% (1)
- Exercícios - 1 - Sistemas Parciais de Coordenadas Plano-Retangulares e UTMDocumento3 páginasExercícios - 1 - Sistemas Parciais de Coordenadas Plano-Retangulares e UTMLuana PereiraAinda não há avaliações
- 5 - AtritoDocumento15 páginas5 - AtritoRosa MaratAinda não há avaliações
- CET166 Formulas Dinamica Dos Solidos Capitulo 01Documento4 páginasCET166 Formulas Dinamica Dos Solidos Capitulo 01Tiaguinho Jr SilvaAinda não há avaliações
- Exercício de CinemáticaDocumento4 páginasExercício de CinemáticaTeo CristoAinda não há avaliações
- Queda LivreDocumento18 páginasQueda LivreTiago TelesAinda não há avaliações
- Ficha Formativa 2 Forças e Movimentos. Sinais e OndasDocumento4 páginasFicha Formativa 2 Forças e Movimentos. Sinais e OndasInêsAinda não há avaliações
- Portfólio 1 Aula 1 Tópicos de Física Moderna PDFDocumento7 páginasPortfólio 1 Aula 1 Tópicos de Física Moderna PDFSamuel PereiraAinda não há avaliações
- Solução de Exercícios MRUVDocumento7 páginasSolução de Exercícios MRUVEder SilvaAinda não há avaliações
- Pag.08 Gráficos MUDocumento1 páginaPag.08 Gráficos MUFabioGomesAinda não há avaliações
- Cronometria de ProduçãoDocumento19 páginasCronometria de ProduçãoPaulo César VenturaAinda não há avaliações
- Caderno Laboratorial (Fisica 11)Documento12 páginasCaderno Laboratorial (Fisica 11)Miriam FilipaAinda não há avaliações
- Atividades de RevisãoDocumento2 páginasAtividades de RevisãoLiamara Vaz RibeiroAinda não há avaliações
- Física - UFC - Aula 07 ExercíciosDocumento3 páginasFísica - UFC - Aula 07 ExercíciosFísica Caderno de Resoluções100% (8)
- Lista de Movimentos em 1 DimensãoDocumento2 páginasLista de Movimentos em 1 DimensãoAndrei BuseAinda não há avaliações
- Lista - Aplicações de Derivada PDFDocumento5 páginasLista - Aplicações de Derivada PDFGabi ReimerAinda não há avaliações
- Cinematica Exercicio 1 PDFDocumento9 páginasCinematica Exercicio 1 PDFJosé Ricardo Silva CostaAinda não há avaliações
- 1.1.3 - Distância Percorrida e Deslocamento. Rapidez Média e Velocidade Média - FinalDocumento7 páginas1.1.3 - Distância Percorrida e Deslocamento. Rapidez Média e Velocidade Média - FinalMarília PachecoAinda não há avaliações
- GravitaçãoDocumento26 páginasGravitaçãolagostinhaAinda não há avaliações
- Relatório MRUR (Catarina)Documento13 páginasRelatório MRUR (Catarina)Carlos Teles da SilvaAinda não há avaliações
- 12 Fisica Aplicada A Pericia de Acidentes Rodoviarios PDFDocumento99 páginas12 Fisica Aplicada A Pericia de Acidentes Rodoviarios PDFGuilhermeAinda não há avaliações