Você também pode gostar
- Atualizações firmware IWR 3000NDocumento5 páginasAtualizações firmware IWR 3000NMedson AGuiarAinda não há avaliações
- Tivdio v-115 Manual EsDocumento2 páginasTivdio v-115 Manual EsBlack Onion100% (2)
- Sistema Hotel Gerencia Estadias HospedesDocumento2 páginasSistema Hotel Gerencia Estadias HospedesMatheus MoraesAinda não há avaliações
- Nova mídia e comunicaçãoDocumento3 páginasNova mídia e comunicaçãoDaniela LaurindoAinda não há avaliações
- SarahThomazDeLimaSa TESEDocumento119 páginasSarahThomazDeLimaSa TESELuizAinda não há avaliações
- Manual Das M Quinas de C LculoDocumento28 páginasManual Das M Quinas de C LculoTiago SilvaAinda não há avaliações
- 2015 IPAA Ebook 1st EditionDocumento274 páginas2015 IPAA Ebook 1st EditionLaura FernandimAinda não há avaliações
- 2017 FredericoFernandes JeanVictor TCCDocumento88 páginas2017 FredericoFernandes JeanVictor TCCAntônio JúniorAinda não há avaliações
- Implementação de CLP didático com hardware e softwareDocumento78 páginasImplementação de CLP didático com hardware e softwareDilmário LimaAinda não há avaliações
- Disponibilização de aplicações via containers Docker em cluster HPCDocumento93 páginasDisponibilização de aplicações via containers Docker em cluster HPCanon_959614045Ainda não há avaliações
- Protótipo Monitoramento Estufas Secagem TabacoDocumento50 páginasProtótipo Monitoramento Estufas Secagem TabacoLeonardo CunhaAinda não há avaliações
- (V3) Apostila Do Aluno - Desenvolvimento Mobile Com FlutterDocumento113 páginas(V3) Apostila Do Aluno - Desenvolvimento Mobile Com FlutterRicardo Santos100% (1)
- FA - PorT - Um Framework para Sistemas Portfólio-Tutor Baseado em AgentesDocumento162 páginasFA - PorT - Um Framework para Sistemas Portfólio-Tutor Baseado em AgentesMarcel BentoAinda não há avaliações
- TCC II - RealDocumento42 páginasTCC II - RealJuniorAinda não há avaliações
- Um Compilador Portugol-Assembly para MicrocontroladorDocumento61 páginasUm Compilador Portugol-Assembly para MicrocontroladorJOERDSON TIAGO BATISTA DA SILVAAinda não há avaliações
- Braço Robótico Controlado via BluetoothDocumento74 páginasBraço Robótico Controlado via BluetoothCassiano FantinAinda não há avaliações
- DissertacaoDocumento68 páginasDissertacaoPedro OliveiraAinda não há avaliações
- Plataforma para TCCDocumento54 páginasPlataforma para TCCHollow KnightAinda não há avaliações
- TCC Olimpio PimentaDocumento48 páginasTCC Olimpio PimentaAnercio SecumaAinda não há avaliações
- Universidade Federal de Juiz de Fora Especialização em Desenvolvimento de Sistemas Com Tecnologia JavaDocumento43 páginasUniversidade Federal de Juiz de Fora Especialização em Desenvolvimento de Sistemas Com Tecnologia JavaBênção TokoAinda não há avaliações
- Livro Alg1Documento356 páginasLivro Alg1AntonioBalbinoAinda não há avaliações
- Sistema GATu - Gerenciamento de Atividades TurmaDocumento36 páginasSistema GATu - Gerenciamento de Atividades Turmaoptativa 4Ainda não há avaliações
- Informática_aplicada - Cap 01_compressedDocumento24 páginasInformática_aplicada - Cap 01_compressedRodrigo MarendaAinda não há avaliações
- Gerenciamento de turma com GATuDocumento47 páginasGerenciamento de turma com GATuoptativa 4100% (1)
- Universidade de Brasília: Arquitetutura Da Informação No Desenvolvimento de Aplicação WebDocumento65 páginasUniversidade de Brasília: Arquitetutura Da Informação No Desenvolvimento de Aplicação WebZhaamil ZhaamAinda não há avaliações
- Sistema USB MicrocontroladorDocumento73 páginasSistema USB MicrocontroladorPaulo Sergio GarciaAinda não há avaliações
- ProTool - Uma Ferramenta de Prototipaçao de Software para o Ambiente PROSOFTDocumento223 páginasProTool - Uma Ferramenta de Prototipaçao de Software para o Ambiente PROSOFTmgbuonome.musicAinda não há avaliações
- Ricardo Cruz - Tese DomoticaDocumento117 páginasRicardo Cruz - Tese DomoticaJosé AlvesAinda não há avaliações
- Virtualização de sistemas operacionaisDocumento114 páginasVirtualização de sistemas operacionaisneorpdAinda não há avaliações
- CronogramaDocumento58 páginasCronogramamusicas trap etcAinda não há avaliações
- Kinect - Innovative Face Recognition SystemDocumento84 páginasKinect - Innovative Face Recognition SystemPaulo KussAinda não há avaliações
- Registro atividades ReactDocumento34 páginasRegistro atividades ReactHenrelly RaonyAinda não há avaliações
- Curso Básico de ArduinoDocumento161 páginasCurso Básico de Arduinoingrid fernandesAinda não há avaliações
- Universidade Federal de Santa Catarina Campus Reitor João David Ferreira Lima Programa de Graduação em Sistemas de InformaçãoDocumento86 páginasUniversidade Federal de Santa Catarina Campus Reitor João David Ferreira Lima Programa de Graduação em Sistemas de InformaçãoMarigmeloAinda não há avaliações
- Microservise AppDocumento85 páginasMicroservise AppFabricio FariasAinda não há avaliações
- TrelloDocumento42 páginasTrelloCésar CostaAinda não há avaliações
- Proposta de ferramenta web para o suporte ao ensinoDocumento82 páginasProposta de ferramenta web para o suporte ao ensinoRicardo SantosAinda não há avaliações
- Apostila - Java Jse Programacao Basica - Atulizada PDFDocumento105 páginasApostila - Java Jse Programacao Basica - Atulizada PDFjose Augusto MeloAinda não há avaliações
- Algoritimos Estruturas Dados1Documento154 páginasAlgoritimos Estruturas Dados1Thayane Mascarenhas SenaAinda não há avaliações
- DanielLM DISSERTDocumento93 páginasDanielLM DISSERTPedro Vitor Brunello PagliarinAinda não há avaliações
- Denisson ABLealDocumento62 páginasDenisson ABLealJuan Carlos Jones G.Ainda não há avaliações
- 2022 TCC FdfalcãoDocumento69 páginas2022 TCC Fdfalcãoiury roqueAinda não há avaliações
- Localização com iBeaconsDocumento64 páginasLocalização com iBeaconsPhilipe Saraiva CruzAinda não há avaliações
- Programa ComtrafoDocumento62 páginasPrograma ComtrafoEng BruccyAinda não há avaliações
- Apostila de Programação em CDocumento120 páginasApostila de Programação em CGabriel AquinoAinda não há avaliações
- O Chatterbot Equus e o Processamento de Linguagem NaturalDocumento58 páginasO Chatterbot Equus e o Processamento de Linguagem NaturalKum PortoAinda não há avaliações
- MONOGRAFIA TestesSegurançaSDN'sDocumento70 páginasMONOGRAFIA TestesSegurançaSDN'sUriel RickAinda não há avaliações
- Sistema SCADA Open SourceDocumento76 páginasSistema SCADA Open SourcenunoAinda não há avaliações
- Introdução à Programação ADVPLDocumento174 páginasIntrodução à Programação ADVPLleocastr100% (1)
- Italo EgyptoDocumento57 páginasItalo EgyptoAdriano SebastiãoAinda não há avaliações
- Transformações de Programas Java para Suportar Evolução da LinguagemDocumento64 páginasTransformações de Programas Java para Suportar Evolução da LinguagemAdmiroCustodioAntonioNacuataAinda não há avaliações
- Apostila - A Arte de Aprender LinguagemC Com Mikroc PRO For PIC PDFDocumento40 páginasApostila - A Arte de Aprender LinguagemC Com Mikroc PRO For PIC PDFLukas AlvesAinda não há avaliações
- Monografia HÉLDER KAVUNDA FINALDocumento76 páginasMonografia HÉLDER KAVUNDA FINALHCSK TECNOLOGYAinda não há avaliações
- Estatística Aplicada Ao Cálculo De Análise Assimétrica Programado No PythonNo EverandEstatística Aplicada Ao Cálculo De Análise Assimétrica Programado No PythonAinda não há avaliações
- Estatística Aplicada A Cálculo De Desvio Padrão Programado No PythonNo EverandEstatística Aplicada A Cálculo De Desvio Padrão Programado No PythonAinda não há avaliações
- Estatística Aplicada A Cálculo De Moda Programado No PythonNo EverandEstatística Aplicada A Cálculo De Moda Programado No PythonAinda não há avaliações
- Estatística Aplicada A Cálculo De Média Programado No PythonNo EverandEstatística Aplicada A Cálculo De Média Programado No PythonAinda não há avaliações
- Estatística Aplicada Ao Cálculo De Curtose Programado No PythonNo EverandEstatística Aplicada Ao Cálculo De Curtose Programado No PythonAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medir Amperímetro Com Esp8266 Programado No ArduinoNo EverandDesenvolvendo Um Datalogger Para Medir Amperímetro Com Esp8266 Programado No ArduinoAinda não há avaliações
- Estatística Aplicada Ao Cálculo De Covariância Programado No PythonNo EverandEstatística Aplicada Ao Cálculo De Covariância Programado No PythonAinda não há avaliações
- Estatística Aplicada Ao Cálculo De Percentil Programado No PythonNo EverandEstatística Aplicada Ao Cálculo De Percentil Programado No PythonAinda não há avaliações
- Enviando Mensagem Pelo Twitter Usando O Arduino E Smartphone Android Programado No App InventorNo EverandEnviando Mensagem Pelo Twitter Usando O Arduino E Smartphone Android Programado No App InventorAinda não há avaliações
- Iniciando Uma Retirada De Foto Usando O Arduino E Smartphone Android Programado No App InventorNo EverandIniciando Uma Retirada De Foto Usando O Arduino E Smartphone Android Programado No App InventorAinda não há avaliações
- Funções Aplicadas A Física e QuímicaDocumento82 páginasFunções Aplicadas A Física e QuímicaHerickAinda não há avaliações
- Política de Garantia Sungrow BrasilDocumento10 páginasPolítica de Garantia Sungrow BrasilHerickAinda não há avaliações
- Orçamento - SR MarceloDocumento8 páginasOrçamento - SR MarceloHerickAinda não há avaliações
- Proposta de Energia Solar Fotovoltaica - FazendaDocumento15 páginasProposta de Energia Solar Fotovoltaica - FazendaHerickAinda não há avaliações
- Proposta de Energia Solar Fotovoltaica - FazendaDocumento15 páginasProposta de Energia Solar Fotovoltaica - FazendaHerickAinda não há avaliações
- (KEHUA) - Conexão WIFI Passo A PassoDocumento22 páginas(KEHUA) - Conexão WIFI Passo A PassoHerickAinda não há avaliações
- TN Wic 259 490 35901Documento17 páginasTN Wic 259 490 35901HerickAinda não há avaliações
- Apresentação - Joi - MPEDocumento41 páginasApresentação - Joi - MPEHerickAinda não há avaliações
- Doe 2019-06-05 Pag 29Documento1 páginaDoe 2019-06-05 Pag 29HerickAinda não há avaliações
- Funções Aplicadas A Física e QuímicaDocumento82 páginasFunções Aplicadas A Física e QuímicaHerickAinda não há avaliações
- Linha DNS: Dados TécnicosDocumento2 páginasLinha DNS: Dados TécnicosHerickAinda não há avaliações
- Michio Kaku - Física - Do - Futuro - PT-BRDocumento786 páginasMichio Kaku - Física - Do - Futuro - PT-BRGustavo SocreppaAinda não há avaliações
- Marco legal da microgeração e minigeração distribuídaDocumento28 páginasMarco legal da microgeração e minigeração distribuídaHerickAinda não há avaliações
- Proposta de Energia Solar Fotovoltaica - FazendaDocumento15 páginasProposta de Energia Solar Fotovoltaica - FazendaHerickAinda não há avaliações
- Energia SolarDocumento1 páginaEnergia SolarHerickAinda não há avaliações
- ExercíciosDocumento1 páginaExercíciosHerickAinda não há avaliações
- Lista 1ano Queda LivreDocumento3 páginasLista 1ano Queda LivreHerickAinda não há avaliações
- Os Fundamentos Da Fisica - Vol. 3 - 9 Ed. RAMALHO PDFDocumento473 páginasOs Fundamentos Da Fisica - Vol. 3 - 9 Ed. RAMALHO PDFRodrigo Sarlo100% (2)
- Princípio Fundamental Da DinâmicaDocumento39 páginasPrincípio Fundamental Da Dinâmicaneiklyson20094828Ainda não há avaliações
- Ondulatória Equação de Onda e Princípio de Superposição, Reflexão, Refração, Interferência e de FraçãoDocumento41 páginasOndulatória Equação de Onda e Princípio de Superposição, Reflexão, Refração, Interferência e de FraçãoHerickAinda não há avaliações
- Exercícios DinâmicaDocumento1 páginaExercícios DinâmicaHerickAinda não há avaliações
- Princípio Fundamental Da DinâmicaDocumento39 páginasPrincípio Fundamental Da Dinâmicaneiklyson20094828Ainda não há avaliações
- Fis Objetivo-04Documento1 páginaFis Objetivo-04HerickAinda não há avaliações
- Modelo Resenha CrticaDocumento2 páginasModelo Resenha CrticaHerickAinda não há avaliações
- Projeto Revestimento CerâmicoDocumento55 páginasProjeto Revestimento CerâmicoLucasAMeloAinda não há avaliações
- Manual-Tecnico Revestimento de CeramicaDocumento19 páginasManual-Tecnico Revestimento de CeramicaLucas de SousaAinda não há avaliações
- Manual de Assent Amen To e Revestimento de Pisos Ceramicos Calcadas PublicasDocumento45 páginasManual de Assent Amen To e Revestimento de Pisos Ceramicos Calcadas PublicasAlex Acosta VieiraAinda não há avaliações
- Aulas de Desenho Projetivo 1 - IntroduçaoDocumento22 páginasAulas de Desenho Projetivo 1 - IntroduçaoGustavo CardosoAinda não há avaliações
- Currículo para Professor de Segurança Do TrabalhoDocumento3 páginasCurrículo para Professor de Segurança Do TrabalhoescolacetecAinda não há avaliações
- Relação de Empresas Cadastradas Que Não Possuem Atividade de Transporte Rodoviario de CargasDocumento79 páginasRelação de Empresas Cadastradas Que Não Possuem Atividade de Transporte Rodoviario de CargasLeonardo Diniz de LimaAinda não há avaliações
- Python PenetraçãoDocumento178 páginasPython Penetraçãojuniormj1100% (1)
- 5W2H - o Que É, Como Funciona e Por Que Você Deveria UsarDocumento14 páginas5W2H - o Que É, Como Funciona e Por Que Você Deveria UsarpatricialandiAinda não há avaliações
- 10 04 2014Documento104 páginas10 04 2014renatokawaAinda não há avaliações
- Dispositivos de comando elétricosDocumento19 páginasDispositivos de comando elétricosMabote ZephaniahAinda não há avaliações
- Portas Lógicas Aula 3Documento40 páginasPortas Lógicas Aula 3Waldir De Souza MotaAinda não há avaliações
- O que é eletrocalha e seus principais tiposDocumento36 páginasO que é eletrocalha e seus principais tiposGEDEON GONCALVES ROCHAAinda não há avaliações
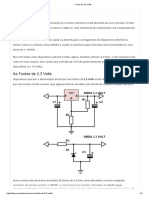
- Fonte de 3.3 VoltsDocumento3 páginasFonte de 3.3 Voltsjoao0honoratoAinda não há avaliações
- Uso da tecnologia bipolar em circuitos integrados atuaisDocumento15 páginasUso da tecnologia bipolar em circuitos integrados atuaisJessica JacksonAinda não há avaliações
- ManifestoDocumento1 páginaManifestoPoint DogAinda não há avaliações
- FTQ Cartas Criaturas Template EditavelDocumento2 páginasFTQ Cartas Criaturas Template EditavelGeek TrekAinda não há avaliações
- Atividade de Pesquisa 01 - Fundamentos Da Eletricidade II - José Remy Pinto Da Silva AraújoDocumento3 páginasAtividade de Pesquisa 01 - Fundamentos Da Eletricidade II - José Remy Pinto Da Silva AraújoDiegoAlves100% (2)
- Evolução Dos Computadores 1971-1980Documento15 páginasEvolução Dos Computadores 1971-1980Rafael BertoliniAinda não há avaliações
- Resenha Texto 9Documento2 páginasResenha Texto 9Andrea SilvaAinda não há avaliações
- Projeto Erasmus de Engenharia EletrotécnicaDocumento219 páginasProjeto Erasmus de Engenharia EletrotécnicabrunofunchasAinda não há avaliações
- PCPT 4 V405 R 03Documento20 páginasPCPT 4 V405 R 03Alex Oliveira100% (1)
- Dell Inspiron 14Z 8GB Windows 8Documento1 páginaDell Inspiron 14Z 8GB Windows 8Édio NetoAinda não há avaliações
- Pedal de segurança PD3S-202 com 3 estágios de acionamentoDocumento2 páginasPedal de segurança PD3S-202 com 3 estágios de acionamentoFelipe MendesAinda não há avaliações
- Atividade Prática Final - Introdução Ao AutocadDocumento4 páginasAtividade Prática Final - Introdução Ao AutocadNádia OliveiraAinda não há avaliações
- Catálogo de Peças: Colheitadeira Autopropelida S550 STSDocumento1.348 páginasCatálogo de Peças: Colheitadeira Autopropelida S550 STSalisson mateus oliveira pereiraAinda não há avaliações
- PCAM4020PN Manual de Instalacao AlphadigiDocumento13 páginasPCAM4020PN Manual de Instalacao AlphadigiAndre ImamuraAinda não há avaliações
- Texto de ApoioDocumento8 páginasTexto de ApoioDomZitoLopesAinda não há avaliações
- Código de Erro Na BrotherDocumento1 páginaCódigo de Erro Na BrotherTRINO-INFORMATICA LAN HOUSEAinda não há avaliações
- Gerador Diesel 1250 KVADocumento2 páginasGerador Diesel 1250 KVAWilly Delbone EliasAinda não há avaliações