Você também pode gostar
- Check List Visual ManutençãoDocumento3 páginasCheck List Visual ManutençãoHelbert100% (6)
- CPU HistoriaDocumento6 páginasCPU HistoriaJoão Nestardo NetoAinda não há avaliações
- VW 24 250 TruckDocumento2 páginasVW 24 250 TruckMarcelo Monteiro Da Correggio100% (1)
- Apostila LINHA PESADA PDFDocumento156 páginasApostila LINHA PESADA PDFBruno Lacerda JuniorAinda não há avaliações
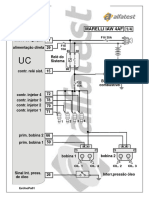
- Palio Iaw 4af PDFDocumento4 páginasPalio Iaw 4af PDFGuillermo ALVARADO RODRIGUEZAinda não há avaliações
- Manual Freio Disco Sime - Ref 5KDocumento24 páginasManual Freio Disco Sime - Ref 5KAbelio Tavares100% (1)
- PIC - Capitulo 1 - Introdução Aos MicrocontroladoresDocumento8 páginasPIC - Capitulo 1 - Introdução Aos MicrocontroladoresNandoAinda não há avaliações
- Aula 01 e 02 de Microprocessadores IiDocumento29 páginasAula 01 e 02 de Microprocessadores IiAlberto VieiraAinda não há avaliações
- Microcontroladores PICDocumento166 páginasMicrocontroladores PICMarcelo SilvaAinda não há avaliações
- Introdução Aos Microcontroladores PIC 16F84ADocumento136 páginasIntrodução Aos Microcontroladores PIC 16F84AMário WessenAinda não há avaliações
- Microcontroladores PIC para Iniciantes (Poluidor - Blogspot.com)Documento169 páginasMicrocontroladores PIC para Iniciantes (Poluidor - Blogspot.com)Felipe FadanniAinda não há avaliações
- Curso Microcontrolador PICDocumento168 páginasCurso Microcontrolador PICGuilherme100% (1)
- Historia Dos MicrocontroladoresDocumento3 páginasHistoria Dos MicrocontroladoresigorcoroliAinda não há avaliações
- Microcontrolador PIC16 F84Documento136 páginasMicrocontrolador PIC16 F84adinamartinsAinda não há avaliações
- Historial de MicroprocessadoresDocumento19 páginasHistorial de MicroprocessadoresJaime MussaAinda não há avaliações
- Micro Control AdoresDocumento67 páginasMicro Control AdoresThiago Laurindo 2Ainda não há avaliações
- Aula 05 Fundamentos MicrocontroladoresDocumento45 páginasAula 05 Fundamentos MicrocontroladoresAlex OliveiraAinda não há avaliações
- A Evolução Dos MicroprocessadoresDocumento18 páginasA Evolução Dos MicroprocessadoresTiãoBento100% (1)
- A Evolução Dos MicroprocessadoresDocumento66 páginasA Evolução Dos MicroprocessadoresNorcésio Epifânio Francisco100% (1)
- Aula 2.0 Quarto Ponto Evolução Dos MicroprocessadoresDocumento27 páginasAula 2.0 Quarto Ponto Evolução Dos MicroprocessadoresEdgar SinceroAinda não há avaliações
- Micros 00Documento24 páginasMicros 00fpreisAinda não há avaliações
- Circuitos Microcontrolados (Arduino) - V2023Documento57 páginasCircuitos Microcontrolados (Arduino) - V2023WESLEY FERNANDES DE AZEVEDOAinda não há avaliações
- A Evolução Dos MicroprocessadoresDocumento21 páginasA Evolução Dos Microprocessadoresch023Ainda não há avaliações
- Sistemas Microcontrolados - Evolução Dos MicroprocessadoresDocumento13 páginasSistemas Microcontrolados - Evolução Dos Microprocessadoreslucas__paroAinda não há avaliações
- Topico 249Documento4 páginasTopico 249Esdras SousaAinda não há avaliações
- Terceira Geração de ComputadoresDocumento3 páginasTerceira Geração de ComputadoresFernando Furtado100% (1)
- 01 - Microcontroladores (Meu)Documento70 páginas01 - Microcontroladores (Meu)goncas666Ainda não há avaliações
- 02 Processadores Plinio Thiago Renato MuriloDocumento16 páginas02 Processadores Plinio Thiago Renato MuriloFilipe GonçalvesAinda não há avaliações
- 32 Bits MicroprocessadorDocumento263 páginas32 Bits Microprocessadorarmando.rochaAinda não há avaliações
- Aula 01Documento25 páginasAula 01idalmirAinda não há avaliações
- ĹndiceDocumento13 páginasĹndiceAbrão AntónioAinda não há avaliações
- Slide MicroprocessadiresDocumento23 páginasSlide Microprocessadiressergio josimarAinda não há avaliações
- Apostila Microcontrolado PIC 16F84 AssemDocumento136 páginasApostila Microcontrolado PIC 16F84 AssemAlfredo Meurer JuniorAinda não há avaliações
- Aula 1Documento23 páginasAula 1Edgar SinceroAinda não há avaliações
- Cap 1 Micro2 2014Documento53 páginasCap 1 Micro2 2014Xavier JoaquimAinda não há avaliações
- Evolucao Dos ProcessadoresDocumento51 páginasEvolucao Dos ProcessadoresOdemario BRufinoAinda não há avaliações
- Introdução Aos Microprocessadores wcBeq9WDocumento10 páginasIntrodução Aos Microprocessadores wcBeq9WMércia Regina da SilvaAinda não há avaliações
- Arquitetura de MicrocontroladoresDocumento65 páginasArquitetura de Microcontroladoreslcvalmeida100% (2)
- Rafael Henrique - História Dos MicroprocessadoresDocumento13 páginasRafael Henrique - História Dos MicroprocessadoresHumberto SantosAinda não há avaliações
- Aula 1Documento16 páginasAula 1Ronaldo Carlos PereiraAinda não há avaliações
- Trabalho de OACDocumento5 páginasTrabalho de OACLuiz GuimarãesAinda não há avaliações
- Apostila Micro1Documento15 páginasApostila Micro1Fernando SilvaAinda não há avaliações
- 3 - DEC - 7511 Introdução A Sistemas EmbarcadosDocumento22 páginas3 - DEC - 7511 Introdução A Sistemas EmbarcadosSamady CorrêaAinda não há avaliações
- Tema 1Documento59 páginasTema 1Alexander PaesAinda não há avaliações
- Trabalho de Computação Grupo 1 - ProcessadoresDocumento4 páginasTrabalho de Computação Grupo 1 - ProcessadoresLeonardo ColpoAinda não há avaliações
- Artigo - Evolução Dos ProcessadoresDocumento10 páginasArtigo - Evolução Dos ProcessadoresCarlos Henrique100% (1)
- Aula 1Documento13 páginasAula 1Edgar SinceroAinda não há avaliações
- 1 - DEC - 7511 1.0 Evolução Dos MicroprocessadoresDocumento39 páginas1 - DEC - 7511 1.0 Evolução Dos MicroprocessadoresSamady CorrêaAinda não há avaliações
- Trabalho de InformaticaDocumento14 páginasTrabalho de InformaticaManuelito Simão Nhachungue NhachungueAinda não há avaliações
- Apost Microcont 11Documento148 páginasApost Microcont 11Wagner AguiarAinda não há avaliações
- Historia Dos ProcessadoresDocumento12 páginasHistoria Dos ProcessadoresAndrey KamikawachiAinda não há avaliações
- Apostila de InformáticaDocumento91 páginasApostila de InformáticaCristiane MoreiraAinda não há avaliações
- Desenvolvendo Um Controle De Acesso Para Automação De Chuveiro Com Base No Pic18f1220 E Xc8No EverandDesenvolvendo Um Controle De Acesso Para Automação De Chuveiro Com Base No Pic18f1220 E Xc8Ainda não há avaliações
- Interface de Entrada e Saída IiDocumento25 páginasInterface de Entrada e Saída IiJeferson SalazarAinda não há avaliações
- Tecnologia de FabricaçãoDocumento7 páginasTecnologia de FabricaçãoMauro OnishiAinda não há avaliações
- Rele de Segurança - SRB 301mc-24vDocumento6 páginasRele de Segurança - SRB 301mc-24vRobsonAinda não há avaliações
- Interface de Entrada e SaídaDocumento17 páginasInterface de Entrada e SaídaJeferson SalazarAinda não há avaliações
- Flange HiluxDocumento1 páginaFlange HiluxJeferson SalazarAinda não há avaliações
- Flange HiluxDocumento1 páginaFlange HiluxJeferson SalazarAinda não há avaliações
- Slc440com Er 0330 30Documento7 páginasSlc440com Er 0330 30Jeferson SalazarAinda não há avaliações
- Painel 4 Dsmu080 Com THC BaldoDocumento1 páginaPainel 4 Dsmu080 Com THC BaldoJeferson SalazarAinda não há avaliações
- EASY SERVO DRIVER - Tensao - 40 00 VDC - Corrente - 8 0 A - Man-I002277Documento22 páginasEASY SERVO DRIVER - Tensao - 40 00 VDC - Corrente - 8 0 A - Man-I002277Jeferson SalazarAinda não há avaliações
- Driver Motor de Passo 7.2Documento18 páginasDriver Motor de Passo 7.2Jeferson SalazarAinda não há avaliações
- Configuração THCDocumento1 páginaConfiguração THCJeferson SalazarAinda não há avaliações
- PGC 2021 - PGC 2021 CgtiDocumento2 páginasPGC 2021 - PGC 2021 CgtiRouter casa DilmaAinda não há avaliações
- Manual Modulo de Perfuração Atualizado 07032023Documento10 páginasManual Modulo de Perfuração Atualizado 07032023Geotec EngenhariaAinda não há avaliações
- Manual - Do - Usuário - Corp 8000 - Português-1Documento111 páginasManual - Do - Usuário - Corp 8000 - Português-1Cleber GomesAinda não há avaliações
- @@@STVF7 SERIESS ELEVATOR MANUAL (Ver2 - 201207 20) (1) - 21 - 30Documento10 páginas@@@STVF7 SERIESS ELEVATOR MANUAL (Ver2 - 201207 20) (1) - 21 - 30JULIOAinda não há avaliações
- Sist IgniçãoDocumento9 páginasSist IgniçãoMarcosAinda não há avaliações
- Testes Eletronicos de Fusiveis Playstation 2Documento3 páginasTestes Eletronicos de Fusiveis Playstation 2Juliano PrecivalliAinda não há avaliações
- Ipb-10 PT-BR PDFDocumento75 páginasIpb-10 PT-BR PDFOliveira Luis100% (1)
- HomossinéticaDocumento3 páginasHomossinéticaBruno SalgadoAinda não há avaliações
- Apostila Operador de Empilhadeira - SENAIDocumento57 páginasApostila Operador de Empilhadeira - SENAITécnico em Segurança do Trabalho TSTAinda não há avaliações
- Bomba Netztch Lista de Peças CP 200004318Documento1 páginaBomba Netztch Lista de Peças CP 200004318admleonardo.negrisoliAinda não há avaliações
- SGE3Documento5 páginasSGE3RapazterrivelAinda não há avaliações
- Manual Técnico PDV ES BateriaDocumento2 páginasManual Técnico PDV ES BateriaTek BreakAinda não há avaliações
- FusíveisDocumento15 páginasFusíveismarcelogaloucura8Ainda não há avaliações
- Como Desmontar Uma CpuDocumento9 páginasComo Desmontar Uma CpuMarcos DiasAinda não há avaliações
- Tabela de Códigos de Falhas Somente para Os Veículos Da Peugeot e CitroenDocumento1 páginaTabela de Códigos de Falhas Somente para Os Veículos Da Peugeot e Citroenbrunomelodaluz114Ainda não há avaliações
- MF 190 LBDocumento334 páginasMF 190 LBAnonymous HMEn61EAinda não há avaliações
- Manual InversorDocumento3 páginasManual InversorRicardo FuchidaAinda não há avaliações
- Magnum 260 AFS - Manual Do OperadorDocumento670 páginasMagnum 260 AFS - Manual Do Operadorwilian100% (1)
- Embolos Virabrequim CcpaDocumento2 páginasEmbolos Virabrequim CcpaDiogo PurcinaAinda não há avaliações
- Catálogo de Peças GSP (2017 - Atualmente)Documento116 páginasCatálogo de Peças GSP (2017 - Atualmente)Julio CesarAinda não há avaliações
- Catalogo Fusivel CartuchoDocumento7 páginasCatalogo Fusivel CartuchomathyAinda não há avaliações
- D5 - MANUAL - 0749 - Arquitectura de ComputadoresDocumento29 páginasD5 - MANUAL - 0749 - Arquitectura de ComputadoresTécnicasAinda não há avaliações
- CAMBIODocumento14 páginasCAMBIONilson RotherAinda não há avaliações
- AGC 200 Operators Manual 4189340607 BR PDFDocumento20 páginasAGC 200 Operators Manual 4189340607 BR PDFCaua Dias Dos SantosAinda não há avaliações