Você também pode gostar
- Trabalho de Motor de PassoDocumento23 páginasTrabalho de Motor de Passosaulomachado8262Ainda não há avaliações
- Projetos Com Esp32 Programado Em Arduino - Parte ViiiNo EverandProjetos Com Esp32 Programado Em Arduino - Parte ViiiAinda não há avaliações
- Polias ConceitosDocumento5 páginasPolias ConceitosAlianderson lopesAinda não há avaliações
- Manual de Calculo de Polias e CorreiasDocumento3 páginasManual de Calculo de Polias e Correiaswanderlei22_pr3116Ainda não há avaliações
- Correias VDocumento1 páginaCorreias Vmrs13silveiraAinda não há avaliações
- Rodrigo e Mauríco (Mesa Pantográfica - PG II)Documento111 páginasRodrigo e Mauríco (Mesa Pantográfica - PG II)Rodrigo Teixeira100% (1)
- Manual07jun09 CorrenteDocumento19 páginasManual07jun09 CorrenteKlebersonRamosAinda não há avaliações
- Programação Em Assembly Para O Microcontrolador Pic12f Volume INo EverandProgramação Em Assembly Para O Microcontrolador Pic12f Volume INota: 5 de 5 estrelas5/5 (1)
- Calculos de RoscasDocumento20 páginasCalculos de RoscasCarlos Pires100% (1)
- IBR Redutores - Cat Geral 2020 PDFDocumento96 páginasIBR Redutores - Cat Geral 2020 PDFJoão Ricardo StepienAinda não há avaliações
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Manual Técnico - OP-5000Documento14 páginasManual Técnico - OP-5000NOIVODALAGOAAinda não há avaliações
- Puma - Furadeira Pneumática (12) At-4041i 4561Documento1 páginaPuma - Furadeira Pneumática (12) At-4041i 4561Wilson Araujo BarrozoAinda não há avaliações
- Talhas - ClimberDocumento4 páginasTalhas - ClimberRaphaelAinda não há avaliações
- Manual SD400 1D SD600 1DDocumento2 páginasManual SD400 1D SD600 1DMário BassoliAinda não há avaliações
- Acionamentos ElétricosDocumento12 páginasAcionamentos ElétricosMaikon Lucian LenzAinda não há avaliações
- Conversão de Rosca Métrica para PolegadaDocumento14 páginasConversão de Rosca Métrica para PolegadaDavi BobberAinda não há avaliações
- RP 1009101 PDFDocumento20 páginasRP 1009101 PDFDalila VaroghAinda não há avaliações
- Loadercrane PKK12500 Brochure PTDocumento2 páginasLoadercrane PKK12500 Brochure PTJosé BarbosaAinda não há avaliações
- PR.09.04.20.S01-R00 - MD300Documento3 páginasPR.09.04.20.S01-R00 - MD300Luis Gustavo BarbosaAinda não há avaliações
- Catalogo Polimetal PDFDocumento142 páginasCatalogo Polimetal PDFDário BorgesAinda não há avaliações
- ABNT NBR 8407 Ensaios Não Destrutivos - Líquido Penetrante - Detecção de DescontinuidadesDocumento25 páginasABNT NBR 8407 Ensaios Não Destrutivos - Líquido Penetrante - Detecção de DescontinuidadesVitor Soares Antunes100% (1)
- Medidas Painéis OpçãoDocumento1 páginaMedidas Painéis OpçãoPaulo TybinkovskiAinda não há avaliações
- Antena para 80m e 40m Alimentada Com Linha Balanceada de 450 OhmDocumento7 páginasAntena para 80m e 40m Alimentada Com Linha Balanceada de 450 Ohmmario_smateus100% (1)
- Transmissão Por Correntes de RolosDocumento16 páginasTransmissão Por Correntes de RolospaulohkAinda não há avaliações
- Motor Eletrico WEG PDFDocumento9 páginasMotor Eletrico WEG PDFregibahiaAinda não há avaliações
- 4 Dimensionamento de Eixos 20Documento23 páginas4 Dimensionamento de Eixos 20Leonardo Tarnovski100% (1)
- Transmissão+por+correia 28 02 2018Documento46 páginasTransmissão+por+correia 28 02 2018alanokdokAinda não há avaliações
- Tabela de Manutenção Trator LS U60Documento1 páginaTabela de Manutenção Trator LS U60Jeová LucianoAinda não há avaliações
- Conversões de Newton-Metro para Libra-PéDocumento2 páginasConversões de Newton-Metro para Libra-PéHarry Wart WartAinda não há avaliações
- Cardans IndustriaisDocumento18 páginasCardans IndustriaisMary Huaylla AAinda não há avaliações
- Confiabilidade PDFDocumento10 páginasConfiabilidade PDFAlexandre SilvaAinda não há avaliações
- Axor 3344 PlataformaDocumento2 páginasAxor 3344 Plataformasilicom100% (1)
- Manual Instalação MonoviaDocumento23 páginasManual Instalação MonoviaEdimilson LanaAinda não há avaliações
- 10 404 536 041 (Traduzida) .Documento2 páginas10 404 536 041 (Traduzida) .LIONN ONESOLUTION100% (1)
- Manual EnroladorDocumento39 páginasManual EnroladorcaiovalimAinda não há avaliações
- ATS - Guincho de EsticamentoDocumento20 páginasATS - Guincho de EsticamentoElias Tomé100% (1)
- Abnt Resistencia Parafusos PDFDocumento10 páginasAbnt Resistencia Parafusos PDFrichard_pfAinda não há avaliações
- Tabela de Partida de MotoresDocumento14 páginasTabela de Partida de MotoreschamonyxAinda não há avaliações
- 3 Mec Solidos I - Tensões e Deformações Por CisalhamentoDocumento31 páginas3 Mec Solidos I - Tensões e Deformações Por CisalhamentoLeonardo Da JacqueAinda não há avaliações
- Fluído TérmicoDocumento46 páginasFluído TérmicoEzequias RoquimAinda não há avaliações
- Redutor Catalago Linha GSDDocumento12 páginasRedutor Catalago Linha GSDWagner Barbosa Mendonça0% (1)
- Catalogo de Peças (TKA)Documento15 páginasCatalogo de Peças (TKA)junexlogotipoAinda não há avaliações
- Acpl de Correntes PDFDocumento1 páginaAcpl de Correntes PDFFernando DallagnoloAinda não há avaliações
- Molas de Tração.Documento4 páginasMolas de Tração.BrunoAinda não há avaliações
- Dimensionamento de Sistemas Hidráulicos e PneumáticosDocumento3 páginasDimensionamento de Sistemas Hidráulicos e PneumáticosCJCONSTANTEAinda não há avaliações
- Calculando Alinhamento Da Contraponta Torno MecânicoDocumento8 páginasCalculando Alinhamento Da Contraponta Torno MecânicoNirley Fernandes100% (1)
- HKJHKHKJDocumento28 páginasHKJHKHKJGustavo GonçalvesAinda não há avaliações
- Projeto de Transmissão Por Correia-1Documento4 páginasProjeto de Transmissão Por Correia-1Fernando Jadão100% (1)
- Perfis I GerdauDocumento2 páginasPerfis I GerdaursseneAinda não há avaliações
- Guindaste Giratório - ProjetoDocumento18 páginasGuindaste Giratório - Projetodilonvieira7Ainda não há avaliações
- Motor de PassoDocumento15 páginasMotor de PassoRobson De Siqueira OggioniAinda não há avaliações
- Aula 01 - Elementos de Circuitos Elétricos (1-4)Documento49 páginasAula 01 - Elementos de Circuitos Elétricos (1-4)Igor BorgesAinda não há avaliações
- Apol 02 Gtdee - GabaritoDocumento7 páginasApol 02 Gtdee - GabaritoCesar PereiraAinda não há avaliações
- Eags 2022 SelDocumento16 páginasEags 2022 SelVinicius BorgesAinda não há avaliações
- Condensador Evaporativo Sulzer PDFDocumento6 páginasCondensador Evaporativo Sulzer PDFFederico RamellaAinda não há avaliações
- Anatel - Ato #458, de 24 de Janeiro de 2019 - Calculos Relatório de Conformidade RNIDocumento24 páginasAnatel - Ato #458, de 24 de Janeiro de 2019 - Calculos Relatório de Conformidade RNIViníciusAinda não há avaliações
- Bornes Vehicules Electriques PORT - 2023 - WEBDocumento32 páginasBornes Vehicules Electriques PORT - 2023 - WEBTiago rAinda não há avaliações
- Partida Estrela Triângulo Do Zero Ao Dimensionamento-Versao1.0Documento39 páginasPartida Estrela Triângulo Do Zero Ao Dimensionamento-Versao1.0neto512100% (1)
- Aula 1. Oscilações EM e Corrente AlternadaDocumento28 páginasAula 1. Oscilações EM e Corrente AlternadaMatheus HenriqueAinda não há avaliações
- Fatura 300017598339 PDFDocumento1 páginaFatura 300017598339 PDFFlavio CorreaAinda não há avaliações
- Ged 185Documento72 páginasGed 185Tiago Ortiz De OliveiraAinda não há avaliações
- 3 Cálculos Importantes Que Todo Engenheiro Naval Deve Conhecer NonaviosDocumento17 páginas3 Cálculos Importantes Que Todo Engenheiro Naval Deve Conhecer NonaviosManuel RibeiroAinda não há avaliações
- Mit 160801 Critérios Gerais de ManobraDocumento11 páginasMit 160801 Critérios Gerais de ManobraZe JuliaoAinda não há avaliações
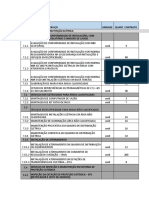
- Planilha de Controle de Serviços Executados - Elétrica - Automação - Medição - contratoVM0633Documento11 páginasPlanilha de Controle de Serviços Executados - Elétrica - Automação - Medição - contratoVM0633Alexandre Henrique Evangelista de OliveiraAinda não há avaliações
- Apostila FinalDocumento216 páginasApostila FinalJoão Viitor GomesAinda não há avaliações
- Subestações Projetos e ConstruçõesManuel BolotinhaDocumento40 páginasSubestações Projetos e ConstruçõesManuel BolotinhaTedson Marcos67% (3)
- Ficha - UFV - Completa - UFV SÃO JOAQUIM IDocumento10 páginasFicha - UFV - Completa - UFV SÃO JOAQUIM IMichele LimaAinda não há avaliações
- InstalaçãoDocumento44 páginasInstalaçãoZacarias NotaAinda não há avaliações
- 6960 Sgad M VD 020 026Documento32 páginas6960 Sgad M VD 020 026muitodollarAinda não há avaliações
- Avaliação 2 - Eletricidade Aplicada - MT2 - Modelo ADocumento7 páginasAvaliação 2 - Eletricidade Aplicada - MT2 - Modelo AIgorFortalAinda não há avaliações
- Projeto Residencial 1 v08 19 15656977440702 9731Documento38 páginasProjeto Residencial 1 v08 19 15656977440702 9731GERSON MINORU YONAMINEAinda não há avaliações
- Calculo Avanco Na Aula PraticaDocumento6 páginasCalculo Avanco Na Aula PraticaAthila LimaAinda não há avaliações
- GC250 - PT DataSheetDocumento4 páginasGC250 - PT DataSheetPatrikFernandesAinda não há avaliações
- Exercícios Resolvidos de Aplicação Da Equação de BernoulliDocumento4 páginasExercícios Resolvidos de Aplicação Da Equação de BernoulliEduTafula100% (1)
- 5.1 Manual Grua Modular1Documento69 páginas5.1 Manual Grua Modular1Nélio Araújo100% (1)
- Cálculo Acionamentos - 2008Documento28 páginasCálculo Acionamentos - 2008PauloAinda não há avaliações
- Wattimetro IK3OIL Rascunho FinalDocumento13 páginasWattimetro IK3OIL Rascunho FinalCospefogoAinda não há avaliações
- CursoPTW (Exercicios - DAPPER-CAPTOR-ARCFLASH-TMS) 2016Documento125 páginasCursoPTW (Exercicios - DAPPER-CAPTOR-ARCFLASH-TMS) 2016natanaelverlydesaAinda não há avaliações
- Manual Do Usuariotorres de ResfriamentoDocumento27 páginasManual Do Usuariotorres de ResfriamentoBruno SilveiraAinda não há avaliações
- Exercício - 11 - Instalações Elétricas I - 02 2016 PitágorasDocumento4 páginasExercício - 11 - Instalações Elétricas I - 02 2016 PitágorasViniciusCamargosAinda não há avaliações
- Trifasicocontrolado PDocumento66 páginasTrifasicocontrolado PJosé Ferreira MaungueAinda não há avaliações