Você também pode gostar
- PS09 Realização de Auditoria Interna Rev05 CNCDocumento4 páginasPS09 Realização de Auditoria Interna Rev05 CNCalo02Ainda não há avaliações
- MG IpnDocumento36 páginasMG Ipnalo02Ainda não há avaliações
- Dosadores Volumetricos GravimetricosDocumento2 páginasDosadores Volumetricos Gravimetricosalo02Ainda não há avaliações
- s09 Analista de Engenharia Eletrica Perito VDocumento12 páginass09 Analista de Engenharia Eletrica Perito Valo02Ainda não há avaliações
- Lista de Exercicios - Variaveis ComplexasDocumento1 páginaLista de Exercicios - Variaveis Complexasalo02Ainda não há avaliações
- Aula 1 - A Abrangências e As Limtações Da EconomiaDocumento30 páginasAula 1 - A Abrangências e As Limtações Da Economiaalo02Ainda não há avaliações
- Modulo1 Mecgeral PDFDocumento170 páginasModulo1 Mecgeral PDFalo02Ainda não há avaliações
- Introdução Aos Sistemas de Distribuição de Energia Elétrica - Nelson Kagan PDF - CompressedDocumento172 páginasIntrodução Aos Sistemas de Distribuição de Energia Elétrica - Nelson Kagan PDF - Compressedalo0250% (2)
- Curso Introducao A Administracao Primeira AulaDocumento36 páginasCurso Introducao A Administracao Primeira Aulaalo02Ainda não há avaliações
- Lista A2 de Campos e Ondas Com RespostaDocumento1 páginaLista A2 de Campos e Ondas Com Respostaalo02Ainda não há avaliações
- Algorítmo - Linguagem de ProgramaçãoDocumento4 páginasAlgorítmo - Linguagem de Programaçãoalo02Ainda não há avaliações
- Obf 2013Documento4 páginasObf 2013Matheus VenancioAinda não há avaliações
- Lista de Exercícios - N2Documento11 páginasLista de Exercícios - N2Jackson RochaAinda não há avaliações
- AP3 ResoluçãoDocumento20 páginasAP3 ResoluçãoVíctor André MacandzaAinda não há avaliações
- Slides Resumo Maquinas EletricasDocumento42 páginasSlides Resumo Maquinas Eletricasvitor4santos_6Ainda não há avaliações
- MODULO 11 - EletrotermofototerapiaDocumento108 páginasMODULO 11 - EletrotermofototerapiaMarina PaulaAinda não há avaliações
- Especif Tecnicas V6 43Documento6 páginasEspecif Tecnicas V6 43ulisses_turco100% (1)
- Cordas e Tubos - Teoria IDocumento8 páginasCordas e Tubos - Teoria IHilder LucasAinda não há avaliações
- Preparação de SoluçõesDocumento10 páginasPreparação de SoluçõesChadrekzy January PungosAinda não há avaliações
- Cartografia 1 - Continuação - AnotaçõesDocumento1 páginaCartografia 1 - Continuação - AnotaçõesMaria Gabriela Perugini RochaAinda não há avaliações
- Manual de Conexões para Tubos - 4300-4 BRDocumento58 páginasManual de Conexões para Tubos - 4300-4 BRMario SouzaAinda não há avaliações
- Atividade Contextualizada - Fund RESMAT - 01196094 - ENG. MECÂNICA - SÉRGIO HENRIQUE TEIXEIRA MELLODocumento2 páginasAtividade Contextualizada - Fund RESMAT - 01196094 - ENG. MECÂNICA - SÉRGIO HENRIQUE TEIXEIRA MELLOSérgio Mello100% (2)
- Ociosidade Social OCRDocumento1 páginaOciosidade Social OCRHellen Bataus100% (1)
- Do Códex Ao E-Book: Metamorfoses Do Livro Na Era DainformaçãoDocumento424 páginasDo Códex Ao E-Book: Metamorfoses Do Livro Na Era DainformaçãoJosé de Mello JuniorAinda não há avaliações
- Capítulo 7 Bucha de PassagemDocumento11 páginasCapítulo 7 Bucha de PassagemReniery Almeida ChagasAinda não há avaliações
- Perfitec PTDocumento11 páginasPerfitec PTluisfaustinoAinda não há avaliações
- Emai Se 1 A 5Documento84 páginasEmai Se 1 A 5Lidiane Paula Valezi100% (1)
- Definição, Medição e Transmissão de PressãoDocumento55 páginasDefinição, Medição e Transmissão de PressãoVisitanteAinda não há avaliações
- Membrana Plasmática e Permeabilidade Da MembranaDocumento13 páginasMembrana Plasmática e Permeabilidade Da MembranaDaiane FreitasAinda não há avaliações
- Modelo Pop AbastecimentoDocumento7 páginasModelo Pop Abastecimentoivoseixa100% (5)
- Os Estados Físicos Da MatériaDocumento2 páginasOs Estados Físicos Da MatériaFábio de OliveiraAinda não há avaliações
- Meios de Contraste: Pontifícia Universidade Católica de São PauloDocumento24 páginasMeios de Contraste: Pontifícia Universidade Católica de São PauloDiego TrevisanAinda não há avaliações
- Matemática 2º ANODocumento2 páginasMatemática 2º ANOMichelle M PinhoAinda não há avaliações
- Lista de Exercicios Da Disciplina de Comunicação Óptica.Documento2 páginasLista de Exercicios Da Disciplina de Comunicação Óptica.Maitsudá MatosAinda não há avaliações
- 1 Lista de Exercícios OrganicaDocumento3 páginas1 Lista de Exercícios OrganicaRamon LopesAinda não há avaliações
- 3º Simulado de FísicaDocumento4 páginas3º Simulado de FísicaRafael PinheiroAinda não há avaliações
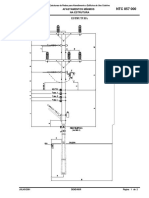
- NTC 857000 - Afastamento Mínimos Na EstruturaDocumento2 páginasNTC 857000 - Afastamento Mínimos Na EstruturaFabio SAinda não há avaliações
- Dimensionamento de Fundacoes de Acordo Com o EC7 – Conceitos Fundamentais.Documento21 páginasDimensionamento de Fundacoes de Acordo Com o EC7 – Conceitos Fundamentais.Ricardo Gonçalves100% (1)
- Resistência Elétrica IDocumento4 páginasResistência Elétrica IJeferson Albino FleckAinda não há avaliações
- Apostila de Terapia ManualDocumento109 páginasApostila de Terapia Manual5725434391% (32)
- Noções Básicas de Treinamento Desportivo MarcadoDocumento66 páginasNoções Básicas de Treinamento Desportivo MarcadoEmerson SilvaAinda não há avaliações