Você também pode gostar
- Manual Caterpillar 312F e 313F PDFDocumento296 páginasManual Caterpillar 312F e 313F PDFNuno Ferreira63% (8)
- Curso de Osciloscópio PDFDocumento36 páginasCurso de Osciloscópio PDFJúnior CremonezAinda não há avaliações
- Programação de Módulos Automotivos É A Nossa Especialidade. Ligue Agora (21) 98916-3008 R. Abreu Rangel, 130 - Eldorado, Maricá - RJ, 24900-890Documento8 páginasProgramação de Módulos Automotivos É A Nossa Especialidade. Ligue Agora (21) 98916-3008 R. Abreu Rangel, 130 - Eldorado, Maricá - RJ, 24900-890cuzaraldeocuAinda não há avaliações
- Check List PF - Imóvel Novo ResidencialDocumento2 páginasCheck List PF - Imóvel Novo ResidencialJosimar A. Ferreira100% (1)
- Introdução Ao LdmicroDocumento22 páginasIntrodução Ao LdmicrorcimplastAinda não há avaliações
- Resumo Funcionamento ImobilizadoresDocumento4 páginasResumo Funcionamento ImobilizadoresSergio GreisoAinda não há avaliações
- Gravando PIC Com PicBurner K150 No Modo ICSPDocumento8 páginasGravando PIC Com PicBurner K150 No Modo ICSPEletecAinda não há avaliações
- Curso EletoEletronica - Geradores e Motores PDFDocumento55 páginasCurso EletoEletronica - Geradores e Motores PDFIagoFernandesAinda não há avaliações
- Manual Acepic Pro v2.0Documento21 páginasManual Acepic Pro v2.0Daniel PungirumAinda não há avaliações
- TCC Finalizado Projeto EletricoDocumento49 páginasTCC Finalizado Projeto EletricoAderson NunesAinda não há avaliações
- Microcontrolador PicDocumento18 páginasMicrocontrolador PicRafael AraujoAinda não há avaliações
- Dicas MotorDocumento59 páginasDicas Motorhld258Ainda não há avaliações
- Conhecimentos Básicos de Hardware - SoftwareDocumento48 páginasConhecimentos Básicos de Hardware - SoftwareRenys SouzaAinda não há avaliações
- Apostila Pic Anchieta V3 PDFDocumento88 páginasApostila Pic Anchieta V3 PDFTeo JavaAinda não há avaliações
- LE3U ManualDocumento11 páginasLE3U Manualrogerio francisco silvaAinda não há avaliações
- Aprendendo A Usar Microcontroladores PICDocumento3 páginasAprendendo A Usar Microcontroladores PICMarcus GonzalesAinda não há avaliações
- Arte Informatica BasicaDocumento210 páginasArte Informatica BasicaAlailson LiraAinda não há avaliações
- Apostila C PICDocumento324 páginasApostila C PICSapinho FreitasAinda não há avaliações
- Revista Reparação Automotiva - 101 PDFDocumento36 páginasRevista Reparação Automotiva - 101 PDFAdail JuniorAinda não há avaliações
- Programação Em Assembly Para O Microcontrolador Pic12f Volume INo EverandProgramação Em Assembly Para O Microcontrolador Pic12f Volume INota: 5 de 5 estrelas5/5 (1)
- Manual - Kit ClpPic40B v2.1Documento13 páginasManual - Kit ClpPic40B v2.1Diogo GonçalvesAinda não há avaliações
- Manual Drive Akdmp5-1.7a V01R12Documento17 páginasManual Drive Akdmp5-1.7a V01R12elderpaesAinda não há avaliações
- 540 4 - Kipor - Carraro - 1 EdiçãoDocumento123 páginas540 4 - Kipor - Carraro - 1 EdiçãoLeanderAinda não há avaliações
- Osciloscópio USBDocumento91 páginasOsciloscópio USBJoyceCrisAinda não há avaliações
- WEG Tutorial Software Ebpro Manual Portugues BR PDFDocumento69 páginasWEG Tutorial Software Ebpro Manual Portugues BR PDFJose Ballesteros Puentes100% (1)
- Nomenclaturas Da Norma DINDocumento2 páginasNomenclaturas Da Norma DINRodrigo FragaAinda não há avaliações
- 7º - Microprocessadores e Microcontroladores-IFPBDocumento3 páginas7º - Microprocessadores e Microcontroladores-IFPBGielson Veras100% (1)
- Geografia A 10º (Gestão Recursos Hídricos) (RP)Documento28 páginasGeografia A 10º (Gestão Recursos Hídricos) (RP)Rui M. C. Pimenta100% (4)
- Esquema Do Gravador PicDocumento6 páginasEsquema Do Gravador Picdenilson.rodr1357Ainda não há avaliações
- Shield LCD 16x2 Com Keypad - Arduino e Cia PDFDocumento18 páginasShield LCD 16x2 Com Keypad - Arduino e Cia PDFestevao_moraesAinda não há avaliações
- TPW 04 Modbus RtuDocumento70 páginasTPW 04 Modbus RtuGilson PaulattiAinda não há avaliações
- Apostila MicroControladoresDocumento173 páginasApostila MicroControladoresPriscila Garcia MendesAinda não há avaliações
- Revista Eletrônica para Todos (Nova) PDFDocumento9 páginasRevista Eletrônica para Todos (Nova) PDFXande TécpcAinda não há avaliações
- Osciloscópio e Gerador de SinaisDocumento6 páginasOsciloscópio e Gerador de SinaisVictor De Souza AlmeidaAinda não há avaliações
- Manual Kit Bici MotoDocumento19 páginasManual Kit Bici MotoTarso BrasilAinda não há avaliações
- LISTA MOBYLETTE Outubro 2010Documento12 páginasLISTA MOBYLETTE Outubro 2010NandoAXLIIAinda não há avaliações
- Painel DidáticoDocumento3 páginasPainel DidáticoThiago AzevedoAinda não há avaliações
- Automato TwidoDocumento76 páginasAutomato Twidoa1julio100% (1)
- Índice: FiatDocumento13 páginasÍndice: FiatDiego FelixAinda não há avaliações
- Ferramenta VCO CumminsDocumento28 páginasFerramenta VCO CumminsBalariniRetíficaAinda não há avaliações
- MT Transmision, Caja de VelocidadDocumento64 páginasMT Transmision, Caja de VelocidadRaúlAinda não há avaliações
- Arquitetura e Princípio de Funcionamento Do 8085Documento14 páginasArquitetura e Princípio de Funcionamento Do 8085Josué CampiraAinda não há avaliações
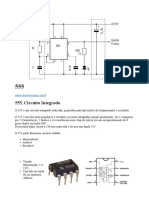
- 555 - Circuito IntegradoDocumento5 páginas555 - Circuito IntegradoGleison PrateadoAinda não há avaliações
- Treinamento Cps 4000Documento101 páginasTreinamento Cps 4000Yuri QueirozAinda não há avaliações
- Fundamentos Sobre CLPDocumento31 páginasFundamentos Sobre CLPFernando Angelim LeiteAinda não há avaliações
- Microcontrolador HSC08Documento33 páginasMicrocontrolador HSC08Denis GlaucoAinda não há avaliações
- Leitura e Interpretaao de Esquemas Eletricos PDF FreeDocumento75 páginasLeitura e Interpretaao de Esquemas Eletricos PDF FreeFilipe Alberto De Magalhães100% (1)
- Check List de RevisãoDocumento1 páginaCheck List de RevisãomarceloAinda não há avaliações
- TUTORIAL MÓDULO PONTE-H L298 - Reduzido PDFDocumento9 páginasTUTORIAL MÓDULO PONTE-H L298 - Reduzido PDFLeandro RibeiroAinda não há avaliações
- Iacom HCS12Documento45 páginasIacom HCS12Thais BarretoAinda não há avaliações
- Tabela de Erro de BiosDocumento1 páginaTabela de Erro de Biosldsan_mgAinda não há avaliações
- Manual DVR 8 Canais Cx-8240Documento118 páginasManual DVR 8 Canais Cx-8240Torezani7850% (2)
- Esquema Elétrico Sonopulse Comp 3 MHZ 7WDocumento3 páginasEsquema Elétrico Sonopulse Comp 3 MHZ 7WDennes DelanoAinda não há avaliações
- 1Documento7 páginas1Dayvson LeandroAinda não há avaliações
- Construindo Um Gravador de PICDocumento26 páginasConstruindo Um Gravador de PICjoseadnilson100% (1)
- Faça Um Simples Pulsador para TesteDocumento6 páginasFaça Um Simples Pulsador para TesteElizangela BrandaoAinda não há avaliações
- Curso de Reparo de EquipamentosDocumento10 páginasCurso de Reparo de EquipamentosCarlos NazarethAinda não há avaliações
- Circuito de Fonte de Alimentação Simétrica Linear para Amplificadores - TE1Documento4 páginasCircuito de Fonte de Alimentação Simétrica Linear para Amplificadores - TE1Elimar SantanaAinda não há avaliações
- Mem Eprom E2prom Flash OkDocumento23 páginasMem Eprom E2prom Flash OkClayton A. B. PereiraAinda não há avaliações
- Circuitos e Sistemas ElétricosDocumento14 páginasCircuitos e Sistemas ElétricosvictorpsilvaAinda não há avaliações
- Manual DimmerDocumento12 páginasManual Dimmerricardo_eletronicaAinda não há avaliações
- Computação Natural - Aula 01 - Introdução A Computação Natural PDFDocumento3 páginasComputação Natural - Aula 01 - Introdução A Computação Natural PDFVinícius PereiraAinda não há avaliações
- Questões Informática FCCDocumento5 páginasQuestões Informática FCCCristiano MelloAinda não há avaliações
- Exercicio Projeto Crud PessoasDocumento4 páginasExercicio Projeto Crud PessoasgustavoAinda não há avaliações
- Chapa de Metal DistendidoDocumento32 páginasChapa de Metal DistendidonunoAinda não há avaliações
- ENSAIO DE ABAIXAMENTO DO BETÃO - Slump TestDocumento16 páginasENSAIO DE ABAIXAMENTO DO BETÃO - Slump TestJéssica Xavier100% (1)
- 4.1. Problemas Sistema Ar-ÁguaDocumento3 páginas4.1. Problemas Sistema Ar-ÁguaFranciscoAinda não há avaliações
- TV PhilcoDocumento62 páginasTV PhilcoTiago CatuxoAinda não há avaliações
- Glossário CerâmicoDocumento12 páginasGlossário CerâmicoAugusto Franco VeríssimoAinda não há avaliações
- Experimento Da Garrafa AzulDocumento2 páginasExperimento Da Garrafa AzulLucas SantosAinda não há avaliações
- Circular Susep 006Documento27 páginasCircular Susep 006sanconcessoAinda não há avaliações
- Lista - 02Documento6 páginasLista - 02Bruce FigueiredoAinda não há avaliações
- Apostila PDDocumento146 páginasApostila PDHeder Oliveira DiasAinda não há avaliações
- Tabela de Frequências Periodos e Comprimentos de OndaDocumento4 páginasTabela de Frequências Periodos e Comprimentos de OndaAlexandre AntonovAinda não há avaliações
- Teste FQ10Documento7 páginasTeste FQ10Angela CarvalhoAinda não há avaliações
- Catalogo Chaves Seccionadoras Compactas Schmersal Brasil 2001Documento1 páginaCatalogo Chaves Seccionadoras Compactas Schmersal Brasil 2001Lisandro ValeroAinda não há avaliações
- 323 6986957 PTBR OmDocumento139 páginas323 6986957 PTBR OmAlexandro Oppera100% (1)
- Gráfico NPSHDocumento1 páginaGráfico NPSHCampos LucasAinda não há avaliações
- Currículo 3.0Documento2 páginasCurrículo 3.0ValmirAinda não há avaliações
- Polimorfismo de Sobreposição e InclusãoDocumento13 páginasPolimorfismo de Sobreposição e InclusãoGilson De Jesus AquinoAinda não há avaliações
- Vortex BombasDocumento5 páginasVortex BombasJhonny AlvarezAinda não há avaliações
- Manual - Técnico Central - de Comando - (New Facility - Analógica Digital) (Revisão 2)Documento2 páginasManual - Técnico Central - de Comando - (New Facility - Analógica Digital) (Revisão 2)Paulo Roberto SouzaAinda não há avaliações
- Argos Rev 1 BetaDocumento2 páginasArgos Rev 1 BetaKrista TranAinda não há avaliações
- Catálogo Válvula Macho Com Camisa para VaporDocumento3 páginasCatálogo Válvula Macho Com Camisa para VaporErasmo GOMES BONIFACIOAinda não há avaliações
- Aula Ponteiros CDocumento9 páginasAula Ponteiros CGhost0101Ainda não há avaliações
- 6 Ano Atividade Ciências 15-07-2019Documento1 página6 Ano Atividade Ciências 15-07-2019Patricia CordeiroAinda não há avaliações