Escolar Documentos
Profissional Documentos
Cultura Documentos
Automação Relatório 2
Enviado por
marialejandraDescrição original:
Título original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Automação Relatório 2
Enviado por
marialejandraDireitos autorais:
Formatos disponíveis
ESCOLA SUPERIOR NÁUTICA INFANTE D.
HENRIQUE
DEPARTAMENTO DE ENGENHARIA MARÍTIMA
CURSO DE ENGENHARIA DE MÁQUINAS MARÍTIMAS
3073- AUTOMAÇÃO
TRABALHO LABORATORIAL- 02
SISTEMAS DE COMANDO COMBINATORIOS
ALUNOS:
KAHORIS BERNAL-11548
OSWAR SAENZ-11550
MARÍA AGUILAR-11551
ENIDH 2018/2019
MIGUEL P. SILVA
Automação-Sistemas de comando combinatório
Conteúdo
Introdução ........................................................................................................................................... 3
Energia Pneumática ...................................................................................................................... 3
Circuito de Avanço/Recuo de um cilindro (Manual/Automático) ...................................................... 8
Circuito de arranque, paragem, emergência ...................................................................................... 9
Sistemas de transferência de embalagem ........................................................................................ 10
Sistema elevatório de cargas ............................................................................................................ 14
Sistema de furação de peçãs ............................................................................................................. 17
Sistema De Comando Combinatório (Electropneumática) ............................................................... 19
Circuito De Avanço/Recuo De Um Cilindro (Manual/ Automático) .................................................. 19
Circuito De Arranque, Paragem, Emergência.................................................................................... 20
Sistema elevatório de cargas ............................................................................................................ 21
Conclusão .......................................................................................................................................... 22
Ilustrações
Fig. 1- Válvula 3/2 monoestável. ........................................................................................... 4
Fig. 2- Tipos de accionamentos das válvulas ......................................................................... 5
Fig. 3- válvulas de Bloqueio. .................................................................................................. 6
Simulações
Simulação. 1- Avanço/Recuo ................................................................................................... 7
Simulação. 2- Avanço / Recuo (Manual/ Automático) .............................................................. 8
Simulação. 3- Arranque, Paragem, Emergência ...................................................................... 9
Simulação. 4- Sistema de transferência de embalagem ............................................................ 13
Simulação. 5-Sistema Elevatório de Cargas ........................................................................... 16
Simulação. 6-Sistema de furação de peças ............................................................................. 19
Simulação. 7- Circuito De Avanço/Recuo De Um Cilindro (Manual/ Automático) ................ 20
Simulação. 8- Circuito De Arranque, Paragem, Emergência ................................................. 20
Simulação. 9- Sistema de transferência de embalagens .......................................................... 21
Automação-Sistemas de comando combinatório
Introdução
A pneumática é uma tecnología que utiliza movimento linear e rotativo nas mais diversas
aplicações, mas deve-se salientar que o movimento linear ou do vaivém é aquele que iremos
dedicar uma maior atenção no estudo que iremos apresentar seguidamente. No entanto, as
modificações dos esquemas de comando para o caso de aplicações com motores pneumáticos
são de fácil compreensão, após a aquisição dos conhecimentos básicos acerca desta
tecnología.
O cilindro pneumático é o componente que executa o referido movimento linear, tendo como
energia, naturalmente o ar comprimido.
Na primeira análise, pode afirmar-se que acções como transportar, fechar, abrir apertar, cortar,
prensar, empurrar, puxar, elevar, são algumas das aplicações do movimento linear que
servirão de exemplo a este estudo.
No entanto, a tecnología pneumática tem evoluído bastante, pelo que hoje enm dia existem
diversoas tipos de cilindros é adequado quando se pretende obter cursos longos. Podem
também ser utilizados em manipuladores automáticos controlados por autómatos
programáveis.
O seguinte texto apresenta a experiência laboratorial em relação aos sistemas de comando
pneumáticos e sistemas de comando combinatorio; em conjunto com uma introducção
teórica que permite uma melhor percepção do trabalho.
Energia Pneumática
Vantagens:
Sistema em circuito aberto;
Limpa;
Não existe perigo de explosão;
Disponível;
Custos energéticos médios;
É acumulável (reservatório da central de ar comprimido).
Desvantagens:
Transporte é caro (por tubagens);
Forças não muito elevadas;
Precisão de movimento, baixos;
Velocidade de sinal é baixa;
Ruído de escape do ar.
Válvulas
As vávulas de controle operacional são elementos que têm por função orientar a direção que
o fluxo de ar deve seguir, a fim de realizar um trabalho proposto. Devem-se levar em conta
os seguintes parâmetros de uma vávula direcional para fins de especificação e projeto:
Automação-Sistemas de comando combinatório
Posição inicial
Número de posições
Número de vías
Tipo de acionamento ou comando
Tipo de retorno
Caudal
Tipo construtivo
A representação gráfica de tais elementos segue as recomendações das normas ISSO 1219.
O número de posições é a quantidadede manobas distintas que uma válvula pode executar de
acordo com seu acionamento. As válvulas são representadas graficamente por retângulos,
dado que cada posição é representada por um retângulo (ou quadrado) dentro da válvula
Tabela de identificação de conexões
Norma ISSO 1219
Pressão 1
Utilização 2 4 6
Escape 3 5 7
Exemplo: Válvula 3/2 monoestável
Fig. 1- Válvula 3/2 monoestável.
As válvulas necessitam de um agente interno ou externo para deslocar suas partes internas
de uma posição a outra. Os elementos responsáveis por tais alterações são chamados
acionamentos e podem ser de diversas naturezas, tais como mecânico, pneumático, elétrico
ou combinado. As válvulas com acionamentos mecânicos são geralmente utilizadas como
sensores de posição ou sensores de fim de curso acionadas por hastes de cilindros
pneumáticos.
No acionamento indireto utiliza-se a energia do próprio ar comprimido para acionar a válvula,
através do acionamento de um pré-comando que aciona a válvula principal em uma ligação
pneumática interna à válvula. As válvulas de pré-comando são geralmente elétricas,
pneumáticas (piloto), manuais (botão) ou mecânicas.
Automação-Sistemas de comando combinatório
Fig. 2- Tipos de accionamientos das válvulas
Manual
Mecânico
Pneumático
Elétrico
Automação-Sistemas de comando combinatório
Válvulas de Bloqueio
Este tipo de válvulas tem como função bloquear a passagem do ar, num só sentido permitindo
assim a passagem livre na direção contrária. A pressão do lado da entrada atual sobre o
elemento vedante permitindo uma perfeita vedação da válvula.
Comunica duas pressões
emitidas separadamente a
um ponto comum. Com
Válvula “OU”
pressões diferentes passará a
de maior intensidade numa
relação.
Permite a emissão do sinal
Válvula “E” de saída quando existirem os
dois sinais de entrada.
Fig. 3- válvulas de Bloqueio.
Automação-Sistemas de comando combinatório
Tecnologia Pneumática (Circuitos Básicos)
Circuito de Avanço/Recuo de um cilindro (Semiautomático)
A+ A-
Simulação. 1- Avanço/Recuo
Equações de comando:
𝐴+= 𝑐1
𝐴−= 𝑎1
Para implementar o circuito pneumático da figura deverá utilizar os seguintes elementos:
Cilindro Pneumático de duplo efeito (Cilindro A);
Válvula distribuidora de ar 5/2, de duplo comando pneumático (A+/A-);
Válvula 3/2 de comando mecânico por rolete e retorno por mola (sensor de fim de
curso a1);
Válvula 3/2 de comando por botão e retorno por mola (C1).
Pretende-se o seguinte: premir manualmente Cl e obter o avanço de A; logo que a haste do
êmbolo atinja o seu fim de curso, o que corresponde ao ponto morto superior, a
válvula aí será atuada mecanicamente, permitindo o regresso automático de A e, portanto,
atingir o ponto morto inferior. Deve notar-se que o único componente novo que aparece
neste circuito é o elemento a1, que é uma válvula 3/2 de comando mecânico por rolete e
retorno por mola (sensor de fim de curso).
Automação-Sistemas de comando combinatório
Circuito de Avanço/Recuo de um cilindro (Manual/Automático)
a0 a1
A+ A-
avanço
recuo Manual/Automático
Simulação. 2- Avanço / Recuo (Manual/ Automático)
Equações de comando:
Manual = M
̅
Automático = M
Avançõ = b
Recuo = r
̅
𝐴+= 𝑎0 ∙ 𝑀 + 𝑏 ∙ M
̅
𝑨−= 𝑎1 ∙ 𝑀 + 𝑟 ∙ M
Para implementar o circuito pneumático da figura 2 deverá utilizar os seguintes elementos:
Cilindro Pneumático de duplo efeito (Cilindro A);
Válvula distribuidora de ar 5/2, de duplo comando pneumático (A+/A-);
Válvulas 3/2 de comando mecânico por rolete e retorno por mola (sensor de fim de
curso a0 e a1);
Válvulas pneumáticas do tipo “OU”;
Válvulas 3/2 de comando por botão e retorno por mola (Avanço e Recuo);
Válvula 5/2 de comando por botão e duas posições estacionárias
(Manual/Automático).
Conforme se pode verificar, a válvula 5/2 de comando manual, por manípulo
(Manual/Automático) permite duas posições estacionarias. O estado corresponde à posição
“Manual” vai alimentar os botões “Avanço”, “Recuo”, enquanto que a linha de alimentação
dos sensores de fim de curso a0 e a1, está à pressão atmosférica (escape). Logo que o
manípulo coloque a válvula na posição “Automático”, passa-se de imediato ao movimento
Automação-Sistemas de comando combinatório
de vaivém automático, visto que a0 e a1 passam a estar alimentados por ar comprimido
enquanto que as botoneira manuais passam a ficar fora de serviço.
Circuito de arranque, paragem, emergência
a1
a0
A+ A-
m
M+
V1
V3
V2
Simulação. 3- Arranque, Paragem, Emergência
Equações de Comando:
A+ = m ∙ a0
A− = ̅̅̅
V3 ∙ a1
̅̅̅2 ∙ V3 )
M+ = (m + V1 ) ∙ (V
Para implementar o circuito pneumático da figura 3 deverá utilizar os seguintes elementos:
Cilindro Pneumático de duplo efeito (Cilindro A);
Válvula distribuidora de ar 5/2, de duplo comando pneumático (A+/A-);
Válvula 3/2 de comando pneumático e retorno por mola (memória monoestável M);
Válvulas 3/2 de comando mecânico por rolete e retorno por mola (sensor de fim de
curso a0 e a1);
Válvulas pneumáticas do tipo “OU”;
Válvulas pneumáticas do tipo “E”;
Válvula 3/2 de comando por botão e retorno por mola (V1 e V2);
Válvula 5/2 de comando por botão e retorno por mola (V3).
Automação-Sistemas de comando combinatório
Arranque através de botoneira de Start: O cilindro efetua o movimento de avanço-recuo de
forma automática
Paragem normal: o cilindro continua a realizar o movimento e quando recuar, para.
Paragem de emergência: o cilindro se estiver a realizar o movimento de avanço, recua
imediatamente e Pará.
Para que o sistema de comando seja eficiente é adequada a utilização de uma memória que
permitam aguardar ciclos iguais durante intervalos de tempo diferentes executados pelo
cilind.ro.
Sistemas de comando combinatórios (pneumática)
Sistemas de transferência de embalagem
Para o seguinte exercício vamos a considerar um sistema de transferência de embalagens
constituído por dois cilindros pneumáticos (cilindro A e B). Para completar a sua função os
cilindros realizam o seguinte ciclo: St/B+/A+/B-/A-
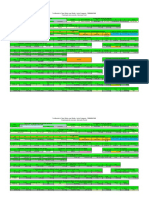
Tabela de verdade
A continuação apresenta-se a tabela de verdade de o exercício de aplicação pneumática
apresentado, o objetivo de esta tabela de verdade é apresentar a evolução do sistema com o
fim de cumprir o ciclo requerido principalmente, para construir a tabela de verdade tem-se
que ter em comta os diferentes elementos que compõem o sistema pneumático, neste
exercício considera-se a existência de dois cilindros pneumático de duplo efeito, quatro
sensores de fim de curso pneumáticos, dois válvulas distribuidoras de ar pneumáticas de
duplo comando (5/2) e uma botoneira de Start/stop (válvula 3/2 pneumática com
encravamento).
Os sensores estarão representados por (a0 , a1 , b0 , b1 ), e os cilindros estarán representados
por (A e B). A+
representa o comando de avanço do primeiro cilindro e A- representa o recuo de este cilindro,
B+ representa o avanço do segundo cilindro e B- representa o recuo de este cilindro, os
comandos são feitos seguindo o ciclo apresentado.
Automação-Sistemas de comando combinatório
Para que o sistema funcione é preciso que o star este ligado, antes de empezar o ciclo nota-
se que o cilindro A e o cilindro B estão recuados pelo qual assume-se que os sensores
( a0 e b0 ) estarão acionados e por consequente os sensores ( a1 e b1 ) não vão a estar
acionados, quando um sensor está acionado o representaremos com (1) e quando não estiver
acionado com (0) de igual forma quando queremos acionar um comando já seja de avanço o
de recuo de qualquer de os dois cilindros utilizaremos a mesma logica.
Uma vez que foram definidas as condições iniciais do sistema, construíra-se a tabela de
verdade seguindo ciclo, seguindo o ciclo o primeiro movi mento que faz o sistema é o avanço
do cilindro A , como é de esperar-se existira um intervalo de tempo em que nem o sensor
(a0 ) nem o sensor (a1 ) estarão acionados pelo qual em estos momentos os dois sensores
estarão representados por (0) até que o cilindro A avance até o final de seu curso e em este
momento acionara-se o sensor (a1 ). Devido a que as válvulas distribuidoras de ar utilizadas
neste sistema são de duplo comando pneumático só é preciso que o comado requerido este
acionado no momento em que o necessitamos pelo qual a partir de este momento usa-se (d)
sempre e quando não seja acionado o outro comando. A mesma logica apresentada vai ser
utilizada para contruir a tabela de verdade requerida para o ciclo.
𝐚𝟎 𝐚𝟏 𝐛𝟎 𝐛𝟏 A+ A- B+ B-
1 0 1 0 0 d 1 0
1 0 0 0 0 d d 0
1 0 0 1 1 0 d 0
0 0 0 1 d 0 d 0
0 1 0 1 d 0 0 1
0 1 0 0 d 0 0 d
0 1 1 0 0 1 0 d
0 0 1 0 0 d 0 d
Mapas de Karnaugh
Como foi anteriormente referido os mapas de Karnaugh permitem-nos obter a simplificação
do resultado da função diretamente, neste caso as saídas do sistema são quatro e cada uma
terá seu respetivo mapa de Karnaugh, os mapas de Karnaugh vão a dar-nos como resultado
as equações necessárias para a o construção de nosso sistema de transferência de embalagem,
a utilização de os mapas de Karnaugh surge da necessidade de reduzir o tempo e os
excessivos cálculos para obter nossas funções de saídas simplificadas.
Automação-Sistemas de comando combinatório
A+ 00 01 11 10 𝐚𝟎 , 𝐚𝟏
00 d d d 0
01 d d d 1
11 d d d d
10 0 0 d 0
𝐛𝟎 , 𝐛𝟏
𝐀+= 𝐛𝟏 ∙ 𝐒𝐓 (Função)
A partir da função obtida de este primeiro mapa de Karnaugh pode-se observar que para que o cilindro
A avance é necessário que o star este ligado e que por sua vez o sensor b1 esteja também acionado.
A- 00 01 11 10 𝐚𝟎 , 𝐚𝟏
00 d 0 d d
01 0 0 d 0
11 d d d d
10 d 1 d d
𝐛𝟎 , 𝐛𝟏
𝐀−= 𝐛𝟎 (Função)
A partir da função obtida de este primeiro mapa de Karnaugh pode-se observar que para que o
cilindro A recue é necessário que o sensor b0 esteja acionado.
B+ 00 01 11 10 𝐚𝟎 , 𝐚𝟏
00 d 0 d d
01 d 0 d d
11 d d d d
10 0 0 d 1
𝐛𝟎 , 𝐛𝟏
𝐁+= 𝐚𝟎 (Função)
A partir da função obtida de este primeiro mapa de Karnaugh pode-se observar que para que o cilindro
B avance é necessário que o sensor 𝑎0 esteja acionado.
Automação-Sistemas de comando combinatório
B- 00 01 11 10 𝐚𝟎 , 𝐚𝟏
00 d d d 0
01 0 1 d 0
11 d d d D
10 d d d 0
𝐛𝟎 , 𝐛𝟏
𝐁−= 𝐚𝟏 (Função)
A partir da função obtida de este primeiro mapa de Karnaugh pode-se observar que para que o cilindro
B recue é necessário que o sensor a1 esteja acionado.
Representação pneumática do sistema de transferência de embalagem
A través das equações pode-se concluir que o sistema pneumático de transferência de embalagem
ficara da seguinte forma:
Simulação. 4- Sistema de transferência de embalagem
Automação-Sistemas de comando combinatório
Sistema elevatório de cargas
Considere um sistema elevatório de cargas constituído por dois cilindros pneumáticos (cilindro A e
B). Para completar a sua função os cilindros realizam o seguinte ciclo: St/A-/B+/(B-A+), conforme o
diagrama de deslocamento representado na figura 5.
Tabela de verdade
Neste segundo exercício apresentaremos a tabela de verdade de o exercício de aplicação
pneumática de um sistema elevatório de cargas, o objetivo de esta tabela de verdade é
apresentar a evolução dos diferentes componentes de este sistema de elevação de cargas com
o fim de cumprir o ciclo requerido principalmente, como foi referido anteriormente para
construir a tabela de verdade tem-se que ter em comta os diferentes elementos que compõem
o sistema pneumático, neste exercício considera-se a existência de dois cilindros pneumático
de duplo efeito, quatro sensores de fim de curso pneumáticos, uma válvula distribuidora de
ar pneumáticas de duplo comando (5/2) o qual terá a designação de cilindro (A), válvula
distribuidora de ar 5/2 de comando pneumático e retorno por mol o qual terá a designação de
cilindro (B) e uma botoneira de Start/stop (válvula 3/2 pneumática com encravamento).
Os sensores estarão representados por (a0 , a1 , b0 , b1 ), e os cilindros estarán representados
por (A e B). A+ representa o comando de avanço do primeiro cilindro e A- representa o recuo
de este cilindro, B+ representa o avanço do segundo cilindro, os comandos são feitos
seguindo o ciclo apresentado.
Para que o sistema funcione é preciso que o star este ligado, antes de empezar o ciclo nota-
se que o cilindro A e o cilindro B estão recuados pelo qual assume-se que os sensores (1 e b0 )
estarão acionados e por consequente os sensores (a0 e b1 ) não vão a estar acionados, quando
um sensor está acionado o representaremos com (1) e quando não estiver acionado com (0)
de igual forma quando queremos acionar um comando já seja de avanço o de recuo de
qualquer de os dois cilindros utilizaremos a mesma logica.
Uma vez que foram definidas as condições iniciais do sistema, construíra-se a tabela de
verdade seguindo ciclo, seguindo o ciclo o primeiro movimento que faz o sistema é o recuo
do cilindro A , como é de esperar-se existirá um intervalo de tempo em que nem o sensor
(a0 ) nem o sensor (a1 ) estarão acionados pelo qual em estos momentos os dois sensores
estarão representados por (0) até que o cilindro A recue até o final de seu curso e em este
Automação-Sistemas de comando combinatório
momento acionara-se o sensor (a0 ) . Devido a que neste exercício só há uma válvula
distribuidora de ar de duplo comando pneumático e para está só é preciso que o comado
requerido este acionado no momento em que o necessitamos pelo qual a partir de este
momento usa-se (d) sempre e quando não seja acionado o outro comando, para o caso da
válvula distribuidora de ar 5/2 de comando pneumático e retorno por mola está para evitar
que recue sempre devera estar acionada ao menos que requeira-se o contrario. A mesma
logica apresentada vai ser utilizada para contruir o resto da tabela de verdade requerida para
o ciclo.
𝐚𝟎 𝐚𝟏 𝐛𝟎 𝐛𝟏 A+ A- B+
0 1 1 0 0 1 0
0 0 1 0 0 d 0
1 0 1 0 0 d 1
1 0 0 0 0 d 1
1 0 0 1 1 0 0
0 0 0 0 d 0 0
Mapas de Karnaugh
A continuação apresentam-se os diferentes mapas de Karnaugh para os diferentes comandos
requeridos no sistema apresentado.
A+ 00 01 11 10 𝐚𝟎 , 𝐚𝟏
00 d D d 0
01 d D d 1
11 d d d D
10 0 0 d 0
𝐛𝟎 , 𝐛𝟏
𝐀+= 𝐛𝟏 (Função)
A partir da função obtida de este primeiro mapa de Karnaugh pode-se observar que para que o
cilindro A avance é necessário o sensor b1 esteja acionado.
A- 00 01 11 10 𝐚𝟎 , 𝐚𝟏
Automação-Sistemas de comando combinatório
00 d d d D
01 d d d 0
11 d d d D
10 d 1 d D
𝐛𝟎 , 𝐛𝟏
𝐀−= 𝐛𝟎 ∙ 𝐒𝐓 (Função)
A partir da função obtida de este primeiro mapa de Karnaugh pode-se observar que para que o
cilindro A recue é necessário que o star este ligado e que por sua vez o sensor b0 esteja também
acionado.
B+ 00 01 11 10 𝐚𝟎 , 𝐚𝟏
00 0 d d 1
01 d d d 0
11 d d d d
10 0 0 d 1
𝐛𝟎 , 𝐛𝟏
̅̅̅𝟏
𝐁+= 𝐚𝟎 ∙ 𝐛 (Função)
A partir da função obtida de este primeiro mapa de Karnaugh pode-se observar que para que o
cilindro B avance é necessário que o sensor a0 e que o sensor ̅̅̅
b1 Estejam acionados.
Representação pneumática do sistema elevatório de carga
A través das equações pode-se concluir que o sistema pneumático elevatório de carga ficara da
seguinte forma:
Simulação. 5-Sistema Elevatório de Cargas
Automação-Sistemas de comando combinatório
Sistema de furação de peças
Considere um sistema de furação de peças constituído por três cilindros pneumáticos (cilindro A, B
e C). Para completar a sua função os cilindros realizam o seguinte ciclo: St/A+/B+/(A-C+)/B-/C
Sistema de furação de peçãs
Método totalmente gráfico
O método totalmente gráfico permite-nos encontrar as equações de comandos os diferentes sistemas
pneumáticos, a través dos diagramas de movimento, da tabela de possibilidades, dos diagramas de
sensores e os diagramas de impulso permite-nos de uma forma rápida identificar as diferentes
equações de comando, assim como de determinar que tipo de sistema é, sequencial ou combinatório.
O método totalmente gráfico representa uma grande ajuda devido a que reduz o tempo de trabalho
em buscar as equações de comando e observa-se melhor quanto mais cilindros temos em nosso
sistema. Assim como no momento da utilização de memorias no caso de que o sistema seja de tipo
sequencial.
Implementara-se o ciclo com comando pneumático considerando os seguintes elementos:
• Cilindros pneumáticos de duplo efeito (Cilindro A, B e C);
• Cilindro A, B e C - Válvulas distribuidoras de ar 5/2, com duplo comando pneumático;
• Sensores de fim de curso pneumáticos (a0, a1, b0, b1, c0 e c1);
• Botoneira de Start/stop (válvula 3/2 pneumática com encravamento).
Automação-Sistemas de comando combinatório
Equações de comando
A+= c0 ∙ b0 ∙ st
A−= b1
B+= a1
B−= c1 ∙ a0
C+= b1
C−= b0
Elementos ativos
b1 , a1 , b0 , a0
Elementos pasivos
c0 , st, c1
NOTA: devido a complexidade da realização do método totalmente gráfico a computadora
temos que ressaltar que nos diagramas de sensores em caso de que as válvulas sejam
biestáveis o diagrama será tracejado, nosso objetivo era de colocara as linhas tracejadas mais
pela dificultade apresentada foi impossível, mais fazemos enfases neste ponto.
Automação-Sistemas de comando combinatório
Simulação. 6-Sistema de furação de peças
Sistema De Comando Combinatório (Electropneumática)
Circuito De Avanço/Recuo De Um Cilindro (Manual/ Automático)
Para implementar o circuito electropneumático deverá utilizar os seguintes elementos:
• Cilindro Pneumático de duplo efeito;
• Válvula distribuidora de ar 5/2, de duplo comando elétrico (A+/A-);
• Sensores de fim de curso elétricos (a0 e a1);
• Interruptores de impulso (Avanço e Recuo);
• Interruptor de duas posições estacionárias ou de encravamento (Man/Auto).
Equações de comando associadas ao circuito apresentado
Manual = M
̅
automático = M
̅
A+ = a0 ∙ M + M
̅
A − = a1 ∙ M + M
Automação-Sistemas de comando combinatório
Simulação. 7- Circuito De Avanço/Recuo De Um Cilindro (Manual/ Automático)
Circuito De Arranque, Paragem, Emergência
Para implementar o circuito electropneumático deverá utilizar os seguintes elementos:
• Cilindro Pneumático de duplo efeito;
• Válvula distribuidora de ar 5/2, de duplo comando elétrico (A+/A-);
• Relé monoestável (M);
• Sensores de fim de curso elétricos (a0 e a1);
• Interruptores de impulso (Emergência, Stop e Start).
Equações de comando associadas ao circuito apresentado
Emerg ∙ ̅̅̅̅̅̅
M = ̅̅̅̅̅̅̅̅̅ Stop (Star ∙ m)
A+ = m ∙ a0
A− = Emerg + a1
Simulação. 8- Circuito De Arranque, Paragem, Emergência
Automação-Sistemas de comando combinatório
Sistema elevatório de cargas
Considere o sistema elevatório de cargas (secção 3.2) e implemente o ciclo com comando
electropneumático.
Para implementar o circuito electropneumático deverá utilizar os seguintes elementos:
• Cilindros pneumáticos de duplo efeito (Cilindro A e B);
• Cilindro A - Válvula distribuidora de ar 5/2, com duplo comando elétrico;
• Cilindro B – Válvula distribuidora de ar 5/2, com comando elétrico e retorno por mola;
• Sensores de fim de curso elétricos (a0, a1, b0, b1);
• Interruptor de encravamento Start/stop (interruptor de duas posições estacionárias).
Equações de comando associadas ao circuito presentado
𝐴+ = 𝑏1
𝐴− = 𝑏0 ∗ 𝑠𝑡
𝐵 + = 𝑎0 ∗ 𝑏̅1
Simulação. 9- Sistema de transferência de embalagens
Automação-Sistemas de comando combinatório
Conclusão
Neste trabalho foi estudado dois áreas da automação muito importante os quais com base em
eles são implementados muitos sistemas da industria, são utilizados comumente sistemas
pneumáticos e sistemas electropneumático para as diferentes operações industriais entre
outras.
Nos sistemas pneumáticos foram apresentados vários exercícios nos quais a partir do ciclo
tínhamos que fazer a implementação dos sistemas com os diferentes componentes requeridos
entre os quais podem-se mencionara válvulas distribuidoras de ar, cilindros de duplo efeito,
fim de curso. Ao ter os ciclos, para fazer a implementações dos sistemas são normalmente
requeridas as equações de comando, entre as formas de obter as equações de comando de um
sistema pneumático e que por sua vez estas equações funcionam também para um sistema
electropneumático estão os métodos de tabela de verdade/mapas de Karnaugh e o método
totalmente gráfico. Como foi referido em suas diversas secções o método totalmente gráfico
torna-se mais factível no caso em que estivermos a utilizar três cilindros de duplo efeito com
suas respetivas válvulas distribuidoras de ar, devido a que no caso do mapa de Karnaugh
estaríamos a trabalhar com mais entradas e torna que o método demore mais em comparação
com o método totalmente gráfico. Nos diferentes exercícios pode-se observar o
funcionamento e variação que terá o sistema quando é utilizados válvulas distribuidoras
pneumáticas de duplo comando e quando a válvula distribuidora de ar pneumática com
retorno por mola.
Em esta pratica laboratorial foram estudados ciclos combinatórios pelo qual para estos não
era preciso a utilização de memorias, a logica para os sistemas electropneumáticos são as
mesmas porque para o sistemas pneumáticos com a diferencia que a maioria de componentes
com exempção dos cilindros de duplo efeito são alimentados eletricamente e não por ar, pelo
qual é necessária a utilização de um fonte elétrica e um ground.
Automação-Sistemas de comando combinatório
Você também pode gostar
- Problemas Lei MinerDocumento3 páginasProblemas Lei MinermarialejandraAinda não há avaliações
- Novos Combustíveis MarítimosDocumento2 páginasNovos Combustíveis MarítimosmarialejandraAinda não há avaliações
- Automação Relatório 2Documento22 páginasAutomação Relatório 2marialejandraAinda não há avaliações
- Novos Combustíveis MarítimosDocumento2 páginasNovos Combustíveis MarítimosmarialejandraAinda não há avaliações
- PL05 Rendimento Mecanico Do MotorDocumento11 páginasPL05 Rendimento Mecanico Do MotormarialejandraAinda não há avaliações
- Incendios Conceitos Gerais 2012Documento32 páginasIncendios Conceitos Gerais 2012marialejandraAinda não há avaliações
- Valvulas Funcionamiento y MantenimientoDocumento3 páginasValvulas Funcionamiento y MantenimientomarialejandraAinda não há avaliações
- PL04 Binario Potenciae Consumo Especifico Do CombustivelDocumento4 páginasPL04 Binario Potenciae Consumo Especifico Do CombustivelmarialejandraAinda não há avaliações
- PL04 Binario Potenciae Consumo Especifico Do CombustivelDocumento4 páginasPL04 Binario Potenciae Consumo Especifico Do CombustivelmarialejandraAinda não há avaliações
- Relatorio 1 - Sistema de ControloDocumento9 páginasRelatorio 1 - Sistema de ControlomarialejandraAinda não há avaliações
- PL04 Binario Potenciae Consumo Especifico Do CombustivelDocumento13 páginasPL04 Binario Potenciae Consumo Especifico Do CombustivelmarialejandraAinda não há avaliações
- Caderno Técnico FAG - 2006 Sintomas, Causas, Soluções Oficina de RolamentosDocumento24 páginasCaderno Técnico FAG - 2006 Sintomas, Causas, Soluções Oficina de RolamentosBrunoMoreiraAinda não há avaliações
- Ciclo Diag - Volume 09 PDFDocumento104 páginasCiclo Diag - Volume 09 PDFgabrielzinho43100% (4)
- Capitulo 3.1. Propriedades Mecanicas Dos MateriaisDocumento9 páginasCapitulo 3.1. Propriedades Mecanicas Dos MateriaisGabriel CorreiaAinda não há avaliações
- Anexo 06 - Insp Máquinas e Equip EstacionáriosDocumento2 páginasAnexo 06 - Insp Máquinas e Equip EstacionáriosDeivisson DamascenoAinda não há avaliações
- 12 - Vigas MistasDocumento2 páginas12 - Vigas MistasLauro SandroAinda não há avaliações
- Catalogo Suporte TubulaçãoDocumento11 páginasCatalogo Suporte TubulaçãoEdmar Ribeiro LopesAinda não há avaliações
- Helice VM 260 - Pesquisa GoogleDocumento1 páginaHelice VM 260 - Pesquisa Googlebrian mazottiAinda não há avaliações
- Frenagem RegenerativaDocumento23 páginasFrenagem RegenerativaFilipe Sousa BarbosaAinda não há avaliações
- G710-VHP 832 1002-0208 PDFDocumento4 páginasG710-VHP 832 1002-0208 PDFChagas OliveiraAinda não há avaliações
- Torquímetros - GEDOREDocumento48 páginasTorquímetros - GEDORELeandro Nobrega BiedmaAinda não há avaliações
- Hercules 6 0 PT BRDocumento8 páginasHercules 6 0 PT BRLucas ferreira da silvaAinda não há avaliações
- 2 Aula-NewDocumento29 páginas2 Aula-NewFrancisco CostaAinda não há avaliações
- Capitulo 6 IncroperaDocumento60 páginasCapitulo 6 IncroperaRenanAinda não há avaliações
- Aula 02 - Seção Retangular À Flexão SimplesDocumento30 páginasAula 02 - Seção Retangular À Flexão SimplesRicardo BorgesAinda não há avaliações
- Accoes Sismicas Sobre Estruturas de SuporteDocumento8 páginasAccoes Sismicas Sobre Estruturas de SuporteJuventino Federico CumbaneAinda não há avaliações
- Exercícios Outros EnsaiosDocumento3 páginasExercícios Outros EnsaiosrcejrAinda não há avaliações
- Equação de Swing - Aula 2Documento9 páginasEquação de Swing - Aula 2Larissa Cavalheiro Cordeiro MotaAinda não há avaliações
- Relatório de Fisico-Química Experimental I - Determinação Da Capacidade Calorífica de Um SólidoDocumento3 páginasRelatório de Fisico-Química Experimental I - Determinação Da Capacidade Calorífica de Um SólidoThiago LopesAinda não há avaliações
- 2009 01 281233175593SRP3040 01Documento8 páginas2009 01 281233175593SRP3040 01Talita MayAinda não há avaliações
- Tabela JNGDocumento95 páginasTabela JNGCarloSilva0% (1)
- Lubrificantes e Graxas Shell PDFDocumento10 páginasLubrificantes e Graxas Shell PDFChagas OliveiraAinda não há avaliações
- T6Documento8 páginasT6Vitor Joel ChavesAinda não há avaliações
- Ava Unip - Termodinâmica Aplicada - Questionário Unidade IDocumento4 páginasAva Unip - Termodinâmica Aplicada - Questionário Unidade IEliseu ManoelAinda não há avaliações
- 0100058-Catalogo de Pecas EGU Rev46Documento62 páginas0100058-Catalogo de Pecas EGU Rev46kaiquemello100% (1)
- Revista O Mecânico Regulagem de Válvulas Do OM 447 A Mecânico - Revista O Mecânico PDFDocumento4 páginasRevista O Mecânico Regulagem de Válvulas Do OM 447 A Mecânico - Revista O Mecânico PDFBarra Nova FerreiraAinda não há avaliações
- Manual Ar Cond Pac9000 24000ifm8Documento48 páginasManual Ar Cond Pac9000 24000ifm8DONA BINHA DONA BINHAAinda não há avaliações
- Rexroth - A10vso Série 31Documento40 páginasRexroth - A10vso Série 31Níkolas Borges100% (1)
- Arquitetura - AçoMadeiras - Aula 3 e 4Documento53 páginasArquitetura - AçoMadeiras - Aula 3 e 4Juciorle SoaresAinda não há avaliações
- Calculo de Sapatas - Isolada - Divisa - Associada - Lista de AçoDocumento1.033 páginasCalculo de Sapatas - Isolada - Divisa - Associada - Lista de AçoKARINA MIRANZI NOGEUIRAAinda não há avaliações