Você também pode gostar
- Motores de CombustaoDocumento130 páginasMotores de CombustaoPedro Oliveira100% (2)
- Apostila PDFDocumento193 páginasApostila PDFIzabela MariaAinda não há avaliações
- Apostila de Sílabas Complexas - Gilmara CosteiraDocumento143 páginasApostila de Sílabas Complexas - Gilmara Costeiracilenec671Ainda não há avaliações
- Tema 5 - Agentes Químicos - Aerodispersoides e Equipamentos de Proteção RespiratóriaDocumento72 páginasTema 5 - Agentes Químicos - Aerodispersoides e Equipamentos de Proteção RespiratóriaOlidio ReifeAinda não há avaliações
- Alcaloides II ExeDocumento11 páginasAlcaloides II ExeCardoso SilvaAinda não há avaliações
- Planejamento e Organização Do TrabalhoDocumento122 páginasPlanejamento e Organização Do TrabalhoLicitação NeoluzAinda não há avaliações
- Um Elo Entre o Omolokô, A Política e o Samba, Tata Ti Inkice... - Diego UchoaDocumento18 páginasUm Elo Entre o Omolokô, A Política e o Samba, Tata Ti Inkice... - Diego UchoaDiego Uchoa de AmorimAinda não há avaliações
- Sistema PetrolíferoDocumento133 páginasSistema Petrolíferogennilucc100% (7)
- 2º Ano Sistema Abo e Fator RHDocumento7 páginas2º Ano Sistema Abo e Fator RHRenato LimaAinda não há avaliações
- 3001 Física Semana 12 Atividade 01Documento4 páginas3001 Física Semana 12 Atividade 01WASHINGTONAinda não há avaliações
- Book CST Redes de Telecomunicações - Jun2020Documento223 páginasBook CST Redes de Telecomunicações - Jun2020WASHINGTONAinda não há avaliações
- AULA 12 Método de Denavit - HartenbergDocumento34 páginasAULA 12 Método de Denavit - HartenbergWASHINGTONAinda não há avaliações
- AVALIAÇÃODocumento2 páginasAVALIAÇÃOWASHINGTONAinda não há avaliações
- Book Engenharia Elétrica - Jun2020Documento222 páginasBook Engenharia Elétrica - Jun2020WASHINGTONAinda não há avaliações
- HC-05 Datasheet - En.ptDocumento13 páginasHC-05 Datasheet - En.ptWASHINGTONAinda não há avaliações
- Book Engenharia de Controle e Automação - Jun2020Documento265 páginasBook Engenharia de Controle e Automação - Jun2020WASHINGTONAinda não há avaliações
- Book CST Automação Industrial - Jun2020Documento273 páginasBook CST Automação Industrial - Jun2020WASHINGTONAinda não há avaliações
- Descrição: Módulo 1Documento45 páginasDescrição: Módulo 1WASHINGTONAinda não há avaliações
- Plano de AulaDocumento2 páginasPlano de AulaWASHINGTONAinda não há avaliações
- Planejamento DiárioDocumento3 páginasPlanejamento DiárioWASHINGTONAinda não há avaliações
- Driver Motor Ponteh L298N.en - PTDocumento3 páginasDriver Motor Ponteh L298N.en - PTWASHINGTONAinda não há avaliações
- 06 Agentes Químicos - Gases e Vapores e Programa de Proteção RespiratóriaDocumento78 páginas06 Agentes Químicos - Gases e Vapores e Programa de Proteção RespiratóriaWASHINGTONAinda não há avaliações
- 07 Agentes BiológicosDocumento78 páginas07 Agentes BiológicosWASHINGTONAinda não há avaliações
- Aula 6Documento1 páginaAula 6WASHINGTONAinda não há avaliações
- Estácio - AlunosDocumento5 páginasEstácio - AlunosWASHINGTONAinda não há avaliações
- Mecanica Dos Fluidos AvancadaDocumento93 páginasMecanica Dos Fluidos AvancadaWASHINGTONAinda não há avaliações
- ULN2003B-etcTI en PTDocumento25 páginasULN2003B-etcTI en PTWASHINGTONAinda não há avaliações
- RESPOSTAS - 6 - Daniel TrigoDocumento3 páginasRESPOSTAS - 6 - Daniel TrigoWASHINGTONAinda não há avaliações
- Rafael ZuccaDocumento74 páginasRafael ZuccaWASHINGTONAinda não há avaliações
- RESPOSTAS - 10 - Giuliana Baratto Barone - 1779177 - Assignsubmission - File - Trabalho de PSI3012 - GABARITO - Nºs 8988362 e 9016995Documento4 páginasRESPOSTAS - 10 - Giuliana Baratto Barone - 1779177 - Assignsubmission - File - Trabalho de PSI3012 - GABARITO - Nºs 8988362 e 9016995WASHINGTONAinda não há avaliações
- RESPOSTAS - 5 - Bruno Belchior de Castro - 1779178 - Assignsubmission - File - Gabarito PSI - Bruno Castro e Marcos ViniciusDocumento5 páginasRESPOSTAS - 5 - Bruno Belchior de Castro - 1779178 - Assignsubmission - File - Gabarito PSI - Bruno Castro e Marcos ViniciusWASHINGTONAinda não há avaliações
- RESPOSTAS - 1 - Adilson Torres Gregório de Souza - 1779167 - Assignsubmission - File - Resoluções de PSIDocumento7 páginasRESPOSTAS - 1 - Adilson Torres Gregório de Souza - 1779167 - Assignsubmission - File - Resoluções de PSIWASHINGTONAinda não há avaliações
- RESPOSTAS - 8 - Felipe Caracciolo Gonçalves - 1779191 - Assignsubmission - File - GabaritoDocumento1 páginaRESPOSTAS - 8 - Felipe Caracciolo Gonçalves - 1779191 - Assignsubmission - File - GabaritoWASHINGTONAinda não há avaliações
- RESPOSTAS - 2 - Alexandre Xavier Ciuffatelli - 1779187 - Assignsubmission - File - PSI 3012 - GabaritoDocumento2 páginasRESPOSTAS - 2 - Alexandre Xavier Ciuffatelli - 1779187 - Assignsubmission - File - PSI 3012 - GabaritoWASHINGTONAinda não há avaliações
- RESPOSTAS - 3 - Andrea Erina Komo - 1779205 - Assignsubmission - File - PSI GabaritosDocumento6 páginasRESPOSTAS - 3 - Andrea Erina Komo - 1779205 - Assignsubmission - File - PSI GabaritosWASHINGTONAinda não há avaliações
- Fenômenos FísicosDocumento1 páginaFenômenos FísicosWASHINGTONAinda não há avaliações
- 1-Evolução Das Comunicações ÓpticasDocumento4 páginas1-Evolução Das Comunicações ÓpticasWASHINGTONAinda não há avaliações
- Edital Nº 17 - 2023 - DSI - PROEN-IFAL, de 30 - 03 - 2023Documento12 páginasEdital Nº 17 - 2023 - DSI - PROEN-IFAL, de 30 - 03 - 2023Jonas MitomariAinda não há avaliações
- Clima Desértico e Tropical SecoDocumento19 páginasClima Desértico e Tropical SecoLuís Miguel CardosoAinda não há avaliações
- Treinamento Operador de Betoneira - CompressDocumento14 páginasTreinamento Operador de Betoneira - CompressIgor FariasAinda não há avaliações
- Anexo 7 Projeto Da Estrategia de Aquacultura Do Distrito de GorongosaDocumento64 páginasAnexo 7 Projeto Da Estrategia de Aquacultura Do Distrito de Gorongosadelio amosAinda não há avaliações
- Apostila Aux VeterinarioDocumento95 páginasApostila Aux Veterinariolaila gattiAinda não há avaliações
- Entradas de Notas Mes 07Documento22 páginasEntradas de Notas Mes 07Gabriel NobreAinda não há avaliações
- ENGC36-Trafos TrifásicoDocumento21 páginasENGC36-Trafos TrifásicoDiego De Castro FernandesAinda não há avaliações
- O Ego e Seus Mecanismos de DefesaDocumento6 páginasO Ego e Seus Mecanismos de DefesaガキアナAinda não há avaliações
- Loção Capilar Clareadora Camomila Intea Loiro Natural em Oferta DrogasilDocumento1 páginaLoção Capilar Clareadora Camomila Intea Loiro Natural em Oferta DrogasilAndsonLedaAinda não há avaliações
- Correção Da FichaDocumento1 páginaCorreção Da FichaarmindamotaAinda não há avaliações
- 3.2 - Natureza - Sociedade e CulturaDocumento7 páginas3.2 - Natureza - Sociedade e CulturaMargarida QuintelaAinda não há avaliações
- Cálculo Do Comprimento Do Arco Por IntegralDocumento4 páginasCálculo Do Comprimento Do Arco Por IntegralAnderson DouglasAinda não há avaliações
- Como Funciona Iluminação de Quadras PoliesportivasDocumento4 páginasComo Funciona Iluminação de Quadras PoliesportivasRodrigo SeronAinda não há avaliações
- QuestõesDocumento2 páginasQuestõesThauany MalekAinda não há avaliações
- Design, Emoção E O Calçado Feminino: Mulheres Que Amam CalçadosDocumento146 páginasDesign, Emoção E O Calçado Feminino: Mulheres Que Amam CalçadosVania Semedo SoaresAinda não há avaliações
- Comparativo Da Matriz de Energia Elétrica - Brasil-usa-china-AlemanhaDocumento2 páginasComparativo Da Matriz de Energia Elétrica - Brasil-usa-china-AlemanhaAlexandre DuarteAinda não há avaliações
- Livros Paradidáticos-2024Documento5 páginasLivros Paradidáticos-2024Alice SilvaAinda não há avaliações
- Projecto de CursoDocumento17 páginasProjecto de Cursoedgar100% (1)
- Resposta Acusacao JuriDocumento19 páginasResposta Acusacao JuriLuca ModricAinda não há avaliações
- Heitor GalvaoDocumento18 páginasHeitor GalvaoGuilherme BatistaAinda não há avaliações
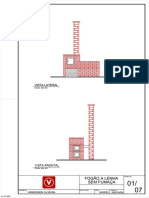
- Fogao A Lenha Sem Fumaça-1-7Documento7 páginasFogao A Lenha Sem Fumaça-1-7Felipe SantiagoAinda não há avaliações
- Pesquisa de MarketingDocumento26 páginasPesquisa de MarketingFabiola ZdepskiAinda não há avaliações
- 2012 (UA) Manual de Inspeção e Manutenção Da EdificaçãoDocumento181 páginas2012 (UA) Manual de Inspeção e Manutenção Da EdificaçãonnnnnaaaaaAinda não há avaliações