Você também pode gostar
- APOSTILA - Cálculo I - FATECDocumento50 páginasAPOSTILA - Cálculo I - FATECAndressa Lima100% (1)
- Lista 2Documento4 páginasLista 2Anderson MeloAinda não há avaliações
- DAIANE - Revisar Envio Do Teste - QUESTIONÁRIO UNIDADE II - 6672-..Documento5 páginasDAIANE - Revisar Envio Do Teste - QUESTIONÁRIO UNIDADE II - 6672-..Daiane TapajósAinda não há avaliações
- Exame AED EN 20-21 - Resolução DetalhadaDocumento9 páginasExame AED EN 20-21 - Resolução DetalhadaGabriel PereiraAinda não há avaliações
- Teste 12-13 AlgLin-CaioMarquesDocumento7 páginasTeste 12-13 AlgLin-CaioMarquescaiomarques102Ainda não há avaliações
- TME 5 Exerc EstDocumento17 páginasTME 5 Exerc EstBeatriz FernandesAinda não há avaliações
- Trabalho UCM (Administração Publica) EstatísticaDocumento12 páginasTrabalho UCM (Administração Publica) EstatísticaAires FelicianoAinda não há avaliações
- ADMFDocumento9 páginasADMFArquitecturaAinda não há avaliações
- Lista - Estatística AplicadaDocumento12 páginasLista - Estatística AplicadaMaximus SalesAinda não há avaliações
- Matrizes, determinantes e sistemas linearesDocumento11 páginasMatrizes, determinantes e sistemas linearesLUANA SILVAAinda não há avaliações
- TutorialDocumento37 páginasTutorialIsmael MoraesAinda não há avaliações
- Donia Jaber Arquivo Comprovante de ResidenciaDocumento13 páginasDonia Jaber Arquivo Comprovante de ResidenciaDunia JaberAinda não há avaliações
- T EstatisticasDocumento8 páginasT Estatisticaswairosse miguelAinda não há avaliações
- Relatorio 1 Grupo 2Documento19 páginasRelatorio 1 Grupo 2MARIA EDUARDA VIEIRA HOLTZAinda não há avaliações
- Testes Primeira AvaliacaoDocumento5 páginasTestes Primeira AvaliacaoAtaniel Silva Santos SegundoAinda não há avaliações
- Operações matemáticas com números e fraçõesDocumento21 páginasOperações matemáticas com números e fraçõesAdriano CordeiroAinda não há avaliações
- Aa2 - Cálculo Diferencial e Integral IIDocumento7 páginasAa2 - Cálculo Diferencial e Integral IIJéferson de LimaAinda não há avaliações
- Cadernos IME V22 Mat Financeira PDFDocumento112 páginasCadernos IME V22 Mat Financeira PDFlmaraujo67Ainda não há avaliações
- Exame POSCOMP 2010Documento28 páginasExame POSCOMP 2010patrickherbethAinda não há avaliações
- Aerogerador potênciaDocumento9 páginasAerogerador potênciaPedro BecaletteAinda não há avaliações
- LA Cap RevisaoDocumento15 páginasLA Cap RevisaoLeandro HupaloAinda não há avaliações
- Custos de processo por setor com matrizesDocumento7 páginasCustos de processo por setor com matrizesWilsonFabioDavidAinda não há avaliações
- 4 Integral TesteDocumento135 páginas4 Integral TesteRaimundo Renato RabeloAinda não há avaliações
- Mef-Problema 03 - GrelhaDocumento12 páginasMef-Problema 03 - GrelhaGabriel de Sá SimõesAinda não há avaliações
- Prova Poscomp 2010Documento28 páginasProva Poscomp 2010andarilho123Ainda não há avaliações
- p7 Ciclo B+ísico GabaritoDocumento5 páginasp7 Ciclo B+ísico GabaritoLeonardo DorathotoAinda não há avaliações
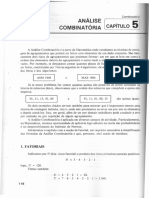
- Análise Combinatória - Cap 5Documento39 páginasAnálise Combinatória - Cap 5Wagner LeodoroAinda não há avaliações
- EstatisticaDocumento9 páginasEstatisticaEdilson ChumeAinda não há avaliações
- Amelia 2Documento9 páginasAmelia 2Isma Mael SitoeAinda não há avaliações
- Sidney C.E.J. Estatistica PDFDocumento10 páginasSidney C.E.J. Estatistica PDFeritoAinda não há avaliações
- Relatório sobre o método do ponto proximal para programação multiobjetivo DCDocumento6 páginasRelatório sobre o método do ponto proximal para programação multiobjetivo DCcarlos eduardo noletoAinda não há avaliações
- Rma - Avaliaã Ã o A1Documento3 páginasRma - Avaliaã Ã o A1Felipe ZimmermannAinda não há avaliações
- Aula Gráficos LinearizaçãoDocumento29 páginasAula Gráficos LinearizaçãoCarla RochaAinda não há avaliações
- Cálculo Numérico - Trabalho 1 - Raízes de Equações - ApresentaçãoDocumento17 páginasCálculo Numérico - Trabalho 1 - Raízes de Equações - ApresentaçãoÁlvaro CrisóstomoAinda não há avaliações
- Resolução de Exercícios de Estatística EducacionalDocumento7 páginasResolução de Exercícios de Estatística EducacionalCientista Mundo-gAinda não há avaliações
- 1.1. Conjuntos Numéricos ProntoDocumento10 páginas1.1. Conjuntos Numéricos ProntoGiulia RoizAinda não há avaliações
- O Ensino Da Matemática Na Educação Básica Através Do Software GeogebraNo EverandO Ensino Da Matemática Na Educação Básica Através Do Software GeogebraAinda não há avaliações
- lista603Documento5 páginaslista603Lucca PinheiroAinda não há avaliações
- ENEM - Conteúdos - 02Documento67 páginasENEM - Conteúdos - 02Leticia PreviteraAinda não há avaliações
- Aula 04- MédiaDocumento16 páginasAula 04- MédiaGuilherme MacielAinda não há avaliações
- Prova MNDocumento12 páginasProva MNMarcelo VictorAinda não há avaliações
- Simulador de compuertas lógicas en MatlabDocumento11 páginasSimulador de compuertas lógicas en MatlabJai GonAinda não há avaliações
- Operações Com FunçõesDocumento5 páginasOperações Com FunçõesLyana AlexandraAinda não há avaliações
- Amostra Proporcional Estratificada de 280 AlunosDocumento4 páginasAmostra Proporcional Estratificada de 280 AlunosHimsky MassaokaAinda não há avaliações
- ACFrOgCwSZpC5sLD4EhKME6KlIxIQkZNC2U2bAXKlPY8Nt6kMD07oGO5k1x1fXUZRLmn1PJxpwFDnNkFAsEL5HtXLLC4lw_nhlS91TAu_WrgOJc5JVgf1c1mB2YVSTGJvU_rtjHxKppzKsNFPGse (1)Documento9 páginasACFrOgCwSZpC5sLD4EhKME6KlIxIQkZNC2U2bAXKlPY8Nt6kMD07oGO5k1x1fXUZRLmn1PJxpwFDnNkFAsEL5HtXLLC4lw_nhlS91TAu_WrgOJc5JVgf1c1mB2YVSTGJvU_rtjHxKppzKsNFPGse (1)Rafael Antônio AraújoAinda não há avaliações
- Dimensionamento de lajes maciçasDocumento14 páginasDimensionamento de lajes maciçasPiterAinda não há avaliações
- AulaDocumento26 páginasAulaAcurcia SafalinaAinda não há avaliações
- 05 - Resolução de ProblemasDocumento7 páginas05 - Resolução de ProblemasMelquisedeque FreitasAinda não há avaliações
- Resolução de EDO por métodos numéricosDocumento21 páginasResolução de EDO por métodos numéricosYuri MaxAinda não há avaliações
- 2o Trabalho de EstatisticaDocumento14 páginas2o Trabalho de EstatisticaCavaco Ernesto ChumeAinda não há avaliações
- Verificando as três pressuposições de ANOVA: H: σ = σ = σ H Pelo menos um σ é diferente dos demais α=0,01Documento16 páginasVerificando as três pressuposições de ANOVA: H: σ = σ = σ H Pelo menos um σ é diferente dos demais α=0,01Jhenifer Spliethoff100% (1)
- Lista de Exercícios de Cálculo Diferencial e Integral III 2 BDocumento2 páginasLista de Exercícios de Cálculo Diferencial e Integral III 2 BTeste kiwi KiwioAinda não há avaliações
- FMCC1 Prova 2Documento5 páginasFMCC1 Prova 2DouglasAinda não há avaliações
- Iot Start - Algoritmos E Programação - C/c++ E Arduino - 4- AvançadoNo EverandIot Start - Algoritmos E Programação - C/c++ E Arduino - 4- AvançadoAinda não há avaliações
- Método Monte Carlo de varredura de domínio (MCS)No EverandMétodo Monte Carlo de varredura de domínio (MCS)Ainda não há avaliações
- Horarios, Turno Mañana y Tarde ActualizadoDocumento4 páginasHorarios, Turno Mañana y Tarde ActualizadoSantos QuezadaAinda não há avaliações
- 5286Documento6 páginas5286Santos QuezadaAinda não há avaliações
- Prova1 SoluçãoDocumento3 páginasProva1 SoluçãoSantos QuezadaAinda não há avaliações
- Prova1 SoluçãoDocumento3 páginasProva1 SoluçãoSantos QuezadaAinda não há avaliações
- Interpretacion EconomicaDocumento17 páginasInterpretacion EconomicaSantos QuezadaAinda não há avaliações
- Notas em CDocumento135 páginasNotas em CCleiton SilvaAinda não há avaliações
- Excel Formulas e Funções EssenciaisDocumento27 páginasExcel Formulas e Funções Essenciaismachrj01Ainda não há avaliações
- Introdução ao Excel básicoDocumento80 páginasIntrodução ao Excel básicomarioAinda não há avaliações
- Dicas - Mapeamento de Processos AdministrativosDocumento12 páginasDicas - Mapeamento de Processos AdministrativosDemerson Moura TavaresAinda não há avaliações
- Desvendando as Fórmulas no ExcelDocumento31 páginasDesvendando as Fórmulas no ExcelDeize Brito100% (2)
- 2-Exercícios RLM - André Arruda - 04-01-2020Documento7 páginas2-Exercícios RLM - André Arruda - 04-01-2020Gabriel AlmeidaAinda não há avaliações
- Sistemas de Equações Gauss-Jordan com Pivotamento MáximoDocumento15 páginasSistemas de Equações Gauss-Jordan com Pivotamento MáximoVinicius Pereira da SilvaAinda não há avaliações
- Um Pouco Sobre o Abaqus (Análise de Elementos Finitos)Documento7 páginasUm Pouco Sobre o Abaqus (Análise de Elementos Finitos)Taynan SilvaAinda não há avaliações
- Matriz de PriorizaçãoDocumento2 páginasMatriz de PriorizaçãoRafael Loureiro ScheiblerAinda não há avaliações
- Determinantes de matrizesDocumento28 páginasDeterminantes de matrizesRafael Lopes GonzalezAinda não há avaliações
- Fatos Importantes para A MatematicaDocumento85 páginasFatos Importantes para A MatematicaLuís Farias100% (2)
- Matemática - Volume Único - Manoel Paiva-OCRDocumento470 páginasMatemática - Volume Único - Manoel Paiva-OCRRusso Tattooer100% (4)
- Introducao Ao Scilab 2Documento63 páginasIntroducao Ao Scilab 2ercintraAinda não há avaliações
- Semana 05 RedesDocumento2 páginasSemana 05 RedesJonathan DumboAinda não há avaliações
- Apostila MatLabDocumento42 páginasApostila MatLabmltoraAinda não há avaliações
- Equações Matriciais, Vetores, Objetos Geométricos e CônicasDocumento344 páginasEquações Matriciais, Vetores, Objetos Geométricos e CônicasHermon Horacio100% (1)
- Programação em TI Voyage 200 Aplicado À EngenhariaDocumento88 páginasProgramação em TI Voyage 200 Aplicado À EngenhariaTiago LopesAinda não há avaliações
- Prova de matrizes e sistemas linearesDocumento2 páginasProva de matrizes e sistemas linearesVinicius Castro CardosoAinda não há avaliações
- Aula-17 ENE005Documento58 páginasAula-17 ENE005Luan SantosAinda não há avaliações
- Vetores e Matrizes No Visual BasicDocumento12 páginasVetores e Matrizes No Visual BasicUbiratan Barros HilárioAinda não há avaliações
- Método de Newton para sistemas não linearesDocumento16 páginasMétodo de Newton para sistemas não linearesFernanda RayeAinda não há avaliações
- Matrices Solucion UPNDocumento10 páginasMatrices Solucion UPNAlexander Alex Vasquez MoralesAinda não há avaliações
- 2022-1 APX3 ComputacaoIIDocumento2 páginas2022-1 APX3 ComputacaoIIGabriel Rodrigues100% (1)
- Ccomp - Pca - TrabalhoDocumento2 páginasCcomp - Pca - TrabalhoVincent VegaAinda não há avaliações
- Algoritmos - e - Visualg - Aulas - 1 2 3 4 5 6Documento63 páginasAlgoritmos - e - Visualg - Aulas - 1 2 3 4 5 6rsenna23Ainda não há avaliações
- Ortogonalidade ReginaldoDocumento60 páginasOrtogonalidade ReginaldoJoshua HewittAinda não há avaliações
- Apostial Matrizes e Determinantes-1Documento34 páginasApostial Matrizes e Determinantes-1VictorAinda não há avaliações
- Matrizes de vendas e faturamento de lojasDocumento2 páginasMatrizes de vendas e faturamento de lojasCrislani LimaAinda não há avaliações
- Matrizes 5Documento16 páginasMatrizes 5marcelo marroqueAinda não há avaliações
- Tipos perguntas questionáriosDocumento4 páginasTipos perguntas questionáriosHelioNascimentoSantosAinda não há avaliações