Você também pode gostar
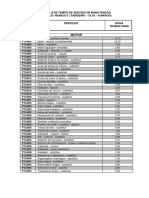
- Tempario Renault LeveDocumento14 páginasTempario Renault LeveDarley Elly Teixeira100% (4)
- Material de Apoio - Agisoft Photoscan Pro PDFDocumento31 páginasMaterial de Apoio - Agisoft Photoscan Pro PDFrezende.dbrAinda não há avaliações
- Tutorial Qgis ClassificacaoDocumento13 páginasTutorial Qgis ClassificacaoPaola P. VillegasAinda não há avaliações
- Apostila Injeção Eletronica - Avançada PDFDocumento65 páginasApostila Injeção Eletronica - Avançada PDFdilceu67% (9)
- Sistema de Combustivel King Air B200 TraduzidoDocumento13 páginasSistema de Combustivel King Air B200 TraduzidoAna LudmilaAinda não há avaliações
- Nardini ND 250 PDFDocumento1 páginaNardini ND 250 PDFWILKENSRANIEL9861Ainda não há avaliações
- Parte 01Documento25 páginasParte 01ARIEL FERNANDESAinda não há avaliações
- Lista05 BCC326 PLEDocumento2 páginasLista05 BCC326 PLEBRIHAN DE JESUS BRANDAOAinda não há avaliações
- Parte 5Documento49 páginasParte 5ARIEL FERNANDESAinda não há avaliações
- Opencv DayDocumento32 páginasOpencv Dayivandersonamaral16Ainda não há avaliações
- Parte 4Documento19 páginasParte 4ARIEL FERNANDESAinda não há avaliações
- Deep Learning PL Aula2 MLP ImagemDocumento11 páginasDeep Learning PL Aula2 MLP ImagemAlex DomenteAinda não há avaliações
- Projeto III de PDIDocumento15 páginasProjeto III de PDInataliaAinda não há avaliações
- Processamento Digital de Imagens Com GNU Octave Jotacisio Araujo Oliveira FLISOL 2017 NatalDocumento38 páginasProcessamento Digital de Imagens Com GNU Octave Jotacisio Araujo Oliveira FLISOL 2017 NatalJose FerreiraAinda não há avaliações
- Classificação de Imagens LandsatDocumento9 páginasClassificação de Imagens LandsatHenrique Matheus CardosoAinda não há avaliações
- Pdi Python Rotacao de ImagensDocumento8 páginasPdi Python Rotacao de Imagensow005958Ainda não há avaliações
- Apostila Praticas SR Com SPRINGDocumento24 páginasApostila Praticas SR Com SPRINGJosé Inácio Lino De Almeida JúniorAinda não há avaliações
- Um Estudo de Processamento de Imagens Com OPENCVDocumento99 páginasUm Estudo de Processamento de Imagens Com OPENCVRenato Moraes Dos SantosAinda não há avaliações
- Sbai - Sistema de SegurançaDocumento3 páginasSbai - Sistema de Segurançachigo1604Ainda não há avaliações
- Aula 5 - Computacao Grafica - EngenhariaDocumento10 páginasAula 5 - Computacao Grafica - Engenhariaapi-3813652Ainda não há avaliações
- Aula 1-Versao 2Documento124 páginasAula 1-Versao 2MuriloToledoAinda não há avaliações
- E Book XGB by Odemir Depieri 1683592886Documento20 páginasE Book XGB by Odemir Depieri 1683592886Lorrayne SilvaAinda não há avaliações
- Mapas Hiposometricos e Curvas de Nível A Partir de Imagens SRTMDocumento10 páginasMapas Hiposometricos e Curvas de Nível A Partir de Imagens SRTMGalbo CabiçaAinda não há avaliações
- Introdução A Visão Do OpencvDocumento36 páginasIntrodução A Visão Do OpencvDielly85Ainda não há avaliações
- VC - SlideDocumento39 páginasVC - SlideCleitonAinda não há avaliações
- Artigo CBA2014 FINALDocumento7 páginasArtigo CBA2014 FINALJoão Luiz CarvalhoAinda não há avaliações
- Sistemas de Informaao Geografica Dicionario IlustradoDocumento21 páginasSistemas de Informaao Geografica Dicionario IlustradoFelipe Gustavo de SouzaAinda não há avaliações
- Prova Solucao C++11 3 CImagem CHistograma CBinarizacao CAutocorrelacao CPorosidade CMascara CFiltro 16x9 PDFDocumento125 páginasProva Solucao C++11 3 CImagem CHistograma CBinarizacao CAutocorrelacao CPorosidade CMascara CFiltro 16x9 PDFbsfalcaoAinda não há avaliações
- Calibração de Câmeras e Correção de Distorção - Visão ComputacionalDocumento18 páginasCalibração de Câmeras e Correção de Distorção - Visão ComputacionalIsabelle OrlandiAinda não há avaliações
- 6tutorial MDS OrtoRetif-16.06Documento18 páginas6tutorial MDS OrtoRetif-16.06Ricky BarrigaAinda não há avaliações
- Curso MicrostationDocumento31 páginasCurso MicrostationRonaldo A. FerreiraAinda não há avaliações
- B2 A Complete System For Vehicle Plate Localization Conci 2009Documento10 páginasB2 A Complete System For Vehicle Plate Localization Conci 2009Ruben CuervoAinda não há avaliações
- Manual Do Estalo Risco Design PDFDocumento27 páginasManual Do Estalo Risco Design PDFotaviorafaeAinda não há avaliações
- RC - Exercícios - Modelo de Referência OSIDocumento2 páginasRC - Exercícios - Modelo de Referência OSICarlos HenriqueAinda não há avaliações
- Lista Prova RespondidaDocumento9 páginasLista Prova RespondidaDanielAinda não há avaliações
- Relatório Rede Neural Convolucional Carro AutônomoDocumento23 páginasRelatório Rede Neural Convolucional Carro AutônomoLara OberderferAinda não há avaliações
- ProvaP2 ProcImagem AlunoDocumento4 páginasProvaP2 ProcImagem AlunoGeza LozerAinda não há avaliações
- Artigo IA PDFDocumento11 páginasArtigo IA PDFLucas Mendes da SilvaAinda não há avaliações
- APOSTILA BÁSICA KERKYTHEA Por CHARLES BÉRGAMODocumento31 páginasAPOSTILA BÁSICA KERKYTHEA Por CHARLES BÉRGAMODaniel LazariniAinda não há avaliações
- ENGESAT - Conhecendo Melhor o CORRELATOR 3DDocumento33 páginasENGESAT - Conhecendo Melhor o CORRELATOR 3DFábio Zanotto BreveAinda não há avaliações
- 1.2 - Tratamento de Imagens DigitaisDocumento28 páginas1.2 - Tratamento de Imagens DigitaisPatrick MenezesAinda não há avaliações
- Relatorio TP - DIPRE - 1190080Documento19 páginasRelatorio TP - DIPRE - 1190080Arquitetogeek PontocomAinda não há avaliações
- Seg ClassificacaoDocumento22 páginasSeg ClassificacaoRaimundo MatsinheAinda não há avaliações
- Tutorial Image J - Quantificação de Microestruturas em Metais Utilizando Redes Neurais ArtificiaisDocumento9 páginasTutorial Image J - Quantificação de Microestruturas em Metais Utilizando Redes Neurais ArtificiaisLucas MoraisAinda não há avaliações
- Introdução Ao Processamento Digital de ImagensDocumento40 páginasIntrodução Ao Processamento Digital de ImagensRodrigo CostaAinda não há avaliações
- Manual Do Estalo Risco Design PDFDocumento27 páginasManual Do Estalo Risco Design PDFGeorgecley AlvesAinda não há avaliações
- Deep Learning PL Aula1 MLPDocumento17 páginasDeep Learning PL Aula1 MLPAlex DomenteAinda não há avaliações
- Apostila Introd Quimiometria - Aulas PraticasDocumento15 páginasApostila Introd Quimiometria - Aulas PraticasRafaelAinda não há avaliações
- Comput GraficaDocumento9 páginasComput GraficaVINICIOS GABRIEL GOMES DA SILVAAinda não há avaliações
- Tipos de ModelosDocumento25 páginasTipos de ModelosSaymon ReisAinda não há avaliações
- Um Aparato Geral Sobre A Visão ComputacionalDocumento8 páginasUm Aparato Geral Sobre A Visão ComputacionalJoao PedroAinda não há avaliações
- Apostila Proteus ARESDocumento43 páginasApostila Proteus ARESClaudio Carvalhinho100% (1)
- Captura de Imagens para Multas Por RadarDocumento11 páginasCaptura de Imagens para Multas Por RadarluciocadastroAinda não há avaliações
- Description of Machine Learning Tools To Classify Business Addresses (Portuguese)Documento12 páginasDescription of Machine Learning Tools To Classify Business Addresses (Portuguese)Fabio NagamineAinda não há avaliações
- Unidade III - Restauração, Reconstrução e Morfologia em ImagensDocumento22 páginasUnidade III - Restauração, Reconstrução e Morfologia em ImagensRobertoAinda não há avaliações
- Introdução A SimulaçãoDocumento24 páginasIntrodução A SimulaçãoNelson CarvalhoAinda não há avaliações
- dezzSBAI05 14214Documento4 páginasdezzSBAI05 14214Eduarda SchwarzAinda não há avaliações
- Visão Computacional - Processamento Digital de Imagens 3DDocumento12 páginasVisão Computacional - Processamento Digital de Imagens 3DMaicon Jose Gomes AbreuAinda não há avaliações
- Sistema de Separação Automática de Embalagens para Controle Da QualidadeDocumento39 páginasSistema de Separação Automática de Embalagens para Controle Da Qualidaderafaelmassaroto100% (1)
- Sem Comentário - Caderno de Questões - Área de TI - 08-08-2Documento10 páginasSem Comentário - Caderno de Questões - Área de TI - 08-08-2Juan Andres ParedesAinda não há avaliações
- 4.2 - Serrilhado (Aliasing)Documento35 páginas4.2 - Serrilhado (Aliasing)Patrick MenezesAinda não há avaliações
- Gract005 - Guia Rápido de Reconstrução de Exames de Coluna - Spine MPRDocumento6 páginasGract005 - Guia Rápido de Reconstrução de Exames de Coluna - Spine MPRweidellAinda não há avaliações
- Método Monte Carlo de varredura de domínio (MCS)No EverandMétodo Monte Carlo de varredura de domínio (MCS)Ainda não há avaliações
- Aula 02 Arranjo Atômico - Ciência Dos MateriaisDocumento13 páginasAula 02 Arranjo Atômico - Ciência Dos MateriaisLucas Mischiatti CazelliAinda não há avaliações
- Naiala Fidelis Gomes - MSCDocumento197 páginasNaiala Fidelis Gomes - MSCLuciano JuniorAinda não há avaliações
- Guia de Fluidos RefrigerantesDocumento2 páginasGuia de Fluidos Refrigerantesdanieldias886899100% (1)
- Teorias para A Função Consumo PDFDocumento20 páginasTeorias para A Função Consumo PDFTamaradosAnjos100% (2)
- 9 - OndasDocumento3 páginas9 - OndasAntonio ManuelAinda não há avaliações
- Alexandre Herculano - DeusDocumento5 páginasAlexandre Herculano - DeusfelipedenardiAinda não há avaliações
- Metafisica II GDocumento16 páginasMetafisica II GSaide IussufoAinda não há avaliações
- T EstatisticasDocumento8 páginasT Estatisticaswairosse miguelAinda não há avaliações
- Concurso Adm Mat 6º Ano 2011 - 2012 CMCGDocumento11 páginasConcurso Adm Mat 6º Ano 2011 - 2012 CMCGIara Sílvia0% (1)
- Prova 1 - 1 Bim Ciências 71 e 72Documento2 páginasProva 1 - 1 Bim Ciências 71 e 72Deisiane De Toni AlvesAinda não há avaliações
- Determinação de Cloretos DefinitivoDocumento10 páginasDeterminação de Cloretos Definitivowrv40Ainda não há avaliações
- Fisica Regular Aluno Autoregulada 1s 3bDocumento34 páginasFisica Regular Aluno Autoregulada 1s 3bEric Teixeira0% (1)
- Todos Exercícios ExcelDocumento18 páginasTodos Exercícios ExcelANDREY100% (1)
- A Mulher Gorda - Full ScoreDocumento1 páginaA Mulher Gorda - Full ScoreTahinaRaharyAinda não há avaliações
- Relatório de Física! ofDocumento7 páginasRelatório de Física! ofAstronáuta AstroAinda não há avaliações
- Livro Texto Semc3a2ntica PDFDocumento151 páginasLivro Texto Semc3a2ntica PDFKelly Cristina Soares100% (1)
- A Linguagem Dos NúmerosDocumento52 páginasA Linguagem Dos NúmerosSirlei da Renata100% (1)
- Atividade IA DUPLA 06 02 2023 ALUNO-1-1 PDFDocumento4 páginasAtividade IA DUPLA 06 02 2023 ALUNO-1-1 PDFMaria FrancoAinda não há avaliações
- Lista1 - Eletrodinamica Classica - JacksonDocumento11 páginasLista1 - Eletrodinamica Classica - JacksonVitor Prestes LuzioAinda não há avaliações
- Exercícios de Revisão - Mat Basica - 9123 AnosDocumento5 páginasExercícios de Revisão - Mat Basica - 9123 AnosMarcus Swell Brandão MenezesAinda não há avaliações
- Trabalho e EnergiaDocumento9 páginasTrabalho e EnergiaAna Caroliny ChavesAinda não há avaliações
- Den 20 CBDocumento8 páginasDen 20 CBOnildoAinda não há avaliações
- Check List - RetroescavadeiraDocumento2 páginasCheck List - RetroescavadeiraMARCOS_SHAKAW100% (1)
- Rele de Nível Finder PDFDocumento18 páginasRele de Nível Finder PDFdiegoferretoAinda não há avaliações
- NBR 12067 - Vidro Plano - Determinacao Da Resistencia A Tracao Na FlexaoDocumento3 páginasNBR 12067 - Vidro Plano - Determinacao Da Resistencia A Tracao Na FlexaoMarcos Aurélio RibeiroAinda não há avaliações
- Linha Tradicional HL - PasquettiDocumento17 páginasLinha Tradicional HL - PasquettiAlan KennedeAinda não há avaliações