Você também pode gostar
- Tabela Tolerância DimensionalDocumento8 páginasTabela Tolerância Dimensionalgqkkypc0dAinda não há avaliações
- Tabela Do EletricistaDocumento2 páginasTabela Do EletricistarenatoAinda não há avaliações
- Ajustes No Sistema ISODocumento1 páginaAjustes No Sistema ISOAndré SilvaAinda não há avaliações
- Aneis ElasticosDocumento5 páginasAneis ElasticosRaylan AmancioAinda não há avaliações
- Tubo DIN 2440Documento1 páginaTubo DIN 2440Boanerges BritoAinda não há avaliações
- Anéis Elásticos para Eixos Grupo: 516 Tipo: EK Norma: DIN 983 Dimensões: MMDocumento2 páginasAnéis Elásticos para Eixos Grupo: 516 Tipo: EK Norma: DIN 983 Dimensões: MMandrelorandiAinda não há avaliações
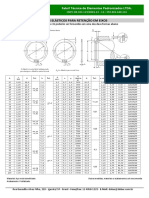
- Anéis Elásticos para Retenção em Eixos Grupo 31Documento1 páginaAnéis Elásticos para Retenção em Eixos Grupo 31dilsonramosAinda não há avaliações
- Anéis Elásticos para Eixos Grupo: 516 Tipo: EK Norma: DIN 983 Dimensões: MMDocumento2 páginasAnéis Elásticos para Eixos Grupo: 516 Tipo: EK Norma: DIN 983 Dimensões: MMTRATORPEÇAS BARBOSAAinda não há avaliações
- 08 Tol - DimensionalDocumento54 páginas08 Tol - Dimensionalhugod1982Ainda não há avaliações
- Unidade+3.3.6+-+planilha+de+calculo+rede+ramificadaDocumento1 páginaUnidade+3.3.6+-+planilha+de+calculo+rede+ramificadaLucas MageskiAinda não há avaliações
- Aneis Retencao EixosDocumento4 páginasAneis Retencao EixosEduardo Braz FilhoAinda não há avaliações
- Tolerâncias ISO para EixosDocumento2 páginasTolerâncias ISO para EixosReginaldo BorgesAinda não há avaliações
- Catálogo APIDocumento2 páginasCatálogo APIfabiocatitaAinda não há avaliações
- Especificação Cabos de Controle NBR 7289 (Blindagem Fita COBRE)Documento2 páginasEspecificação Cabos de Controle NBR 7289 (Blindagem Fita COBRE)Helder RossoAinda não há avaliações
- Pesos e Medidas NylonDocumento2 páginasPesos e Medidas NylonAnderson BaziaAinda não há avaliações
- Anéis de Retenção para Eixos Pequenos - 501 - Anel ElasticoDocumento2 páginasAnéis de Retenção para Eixos Pequenos - 501 - Anel ElasticoLadislau RodriguesAinda não há avaliações
- Anel Rolamento Grupo 508 - Din 5417Documento2 páginasAnel Rolamento Grupo 508 - Din 5417Ronaldo LufixAinda não há avaliações
- Aço Forma - Anéis de Retenção para Eixos Pequenos - 501 - Anel ElasticoDocumento2 páginasAço Forma - Anéis de Retenção para Eixos Pequenos - 501 - Anel ElasticoProjetos NicolettiAinda não há avaliações
- 7.concreto - Aula - Flexão Simples - 3Documento6 páginas7.concreto - Aula - Flexão Simples - 3Carlos EduardoAinda não há avaliações
- Anel ElásticoDocumento3 páginasAnel ElásticoMarcio FariaAinda não há avaliações
- Curva 90° Raio Curto B16.9Documento2 páginasCurva 90° Raio Curto B16.9queirozymAinda não há avaliações
- Aneis Retencao FurosDocumento4 páginasAneis Retencao FurosEduardo Braz FilhoAinda não há avaliações
- Pesos e Medidas Poliacetal: Tarugos Redondos (POM)Documento2 páginasPesos e Medidas Poliacetal: Tarugos Redondos (POM)celsodarosaAinda não há avaliações
- Pesos e Medidas CELERONDocumento2 páginasPesos e Medidas CELERONAntenógenes Juninho100% (1)
- Linha Smu - PaquettiDocumento24 páginasLinha Smu - PaquettiAlan KennedeAinda não há avaliações
- Exel de ComnimucionDocumento10 páginasExel de ComnimucionAngela YasminAinda não há avaliações
- Tabelas ComplementaresDocumento4 páginasTabelas ComplementaresJoão GellerAinda não há avaliações
- Prisioneiro Din 939Documento1 páginaPrisioneiro Din 939Michelle Poubel Chelle100% (1)
- APOSTILA PARTE II Cap 1 Controle GeometricoDocumento26 páginasAPOSTILA PARTE II Cap 1 Controle GeometricosjknAinda não há avaliações
- Anéis Elásticos para Retenção em Furos Grupo 42Documento1 páginaAnéis Elásticos para Retenção em Furos Grupo 42dilsonramosAinda não há avaliações
- Anéis Elásticos para Eixos Grupo: 504 Tipo: ML Norma: Dimensões: MMDocumento2 páginasAnéis Elásticos para Eixos Grupo: 504 Tipo: ML Norma: Dimensões: MMandrelorandiAinda não há avaliações
- Curv 2Documento6 páginasCurv 2Osvaldo Junges BomfimAinda não há avaliações
- Anéis Elásticos para Eixos Grupo: 504 Tipo: ML Norma Dimensões: MMDocumento2 páginasAnéis Elásticos para Eixos Grupo: 504 Tipo: ML Norma Dimensões: MMTRATORPEÇAS BARBOSAAinda não há avaliações
- Anel de Retencao para Eixos Grupo 504Documento2 páginasAnel de Retencao para Eixos Grupo 504Ronaldo LufixAinda não há avaliações
- Tabela de Tolerancias ISODocumento2 páginasTabela de Tolerancias ISOFernando BasílioAinda não há avaliações
- Material 7 Prof MauricioDocumento17 páginasMaterial 7 Prof Mauriciojuliano piresAinda não há avaliações
- Tabela Do Traço Do BetãoDocumento1 páginaTabela Do Traço Do BetãoÓscarAinda não há avaliações
- Anéis Elásticos para Furos Grupo: 517 Tipo: IK Norma: DIN 9834 Dimensões: MMDocumento2 páginasAnéis Elásticos para Furos Grupo: 517 Tipo: IK Norma: DIN 9834 Dimensões: MMandrelorandiAinda não há avaliações
- Metodos NumericosDocumento24 páginasMetodos NumericosJUANCA CBAinda não há avaliações
- Desenho Técnico - Tolerâncias e RepresentaçõesDocumento20 páginasDesenho Técnico - Tolerâncias e RepresentaçõesGennaro TrianiAinda não há avaliações
- Corrente Nominal Dos Motores Elétricos TrifásicosDocumento2 páginasCorrente Nominal Dos Motores Elétricos TrifásicosRicardo LanciaAinda não há avaliações
- Ferro Serralharia - Condicoes TecnicasDocumento93 páginasFerro Serralharia - Condicoes TecnicascuscatugaAinda não há avaliações
- MSG X MMDocumento3 páginasMSG X MMCanaril VictóriaAinda não há avaliações
- KTR PT 17 BR Acop KTR RADEX N BDocumento1 páginaKTR PT 17 BR Acop KTR RADEX N BLuis Fernando CanellaAinda não há avaliações
- Anel Elastico para Furo DIN 472 2Documento6 páginasAnel Elastico para Furo DIN 472 2Sidiney Santos SantosAinda não há avaliações
- Tabela de Dimensionamento - Laje Mista MF75Documento1 páginaTabela de Dimensionamento - Laje Mista MF75danielcandido89_7860Ainda não há avaliações
- Vigas U PDFDocumento1 páginaVigas U PDFBruno BrepohlAinda não há avaliações
- Exercício Regressão LinearDocumento4 páginasExercício Regressão LinearGabriele JacomoAinda não há avaliações
- PeneirasDocumento55 páginasPeneirasÉder AlvesAinda não há avaliações
- Lista de ExerciciosDocumento9 páginasLista de ExerciciosAline AraujoAinda não há avaliações
- LISTA 1 AlgebraDocumento3 páginasLISTA 1 AlgebraDANIEL SILVAAinda não há avaliações
- Trabalho Simulações de Fluxo de PotênciaDocumento31 páginasTrabalho Simulações de Fluxo de PotênciaSander BryanAinda não há avaliações
- Jatinox Planilha Produtos Tubos C CosturaDocumento6 páginasJatinox Planilha Produtos Tubos C CosturapirostarkbrasilAinda não há avaliações
- Pop Os1Documento1 páginaPop Os1Edyerwerton FelipeAinda não há avaliações
- Quantidade Amarrado Usiminas PDFDocumento1 páginaQuantidade Amarrado Usiminas PDFglobaldisAinda não há avaliações
- Capacidade de Condução de CorrenteDocumento2 páginasCapacidade de Condução de CorrenteEDINEI - REVOAinda não há avaliações
- Catálogo BelfanoDocumento56 páginasCatálogo BelfanoAndreArmaniniAinda não há avaliações
- Poliuretano Pesos e MedidasDocumento2 páginasPoliuretano Pesos e MedidasDanilloMateusAinda não há avaliações
- Catálogo Cabos W-M DISNACONDocumento2 páginasCatálogo Cabos W-M DISNACONHdufAinda não há avaliações
- 01 GAMA, Ruy, A Tecnologia e o Trabalho Na HistóriaDocumento14 páginas01 GAMA, Ruy, A Tecnologia e o Trabalho Na HistóriavenisemeloAinda não há avaliações
- Apostila Oswaldo - 2 Ano Do Ensino Mã - Dio Normal 1 SemestreDocumento20 páginasApostila Oswaldo - 2 Ano Do Ensino Mã - Dio Normal 1 SemestreAnna•-•Ainda não há avaliações
- Apostila de Elementos de Maquinas - 2017.1Documento87 páginasApostila de Elementos de Maquinas - 2017.1spkperformanceAinda não há avaliações
- Apresent Grupo Paiva Engenharia LitoralDocumento11 páginasApresent Grupo Paiva Engenharia LitoralClayton LeiteAinda não há avaliações
- Ebook 64 Tipos de Simbologia Eletrica Usada em Projetos EletricosDocumento16 páginasEbook 64 Tipos de Simbologia Eletrica Usada em Projetos EletricosNilton RodriguesAinda não há avaliações
- Código de Obras - Lei 84 de 1993 - Prefeitura Municipal de SantosDocumento36 páginasCódigo de Obras - Lei 84 de 1993 - Prefeitura Municipal de Santosmarcus_aureliusAinda não há avaliações
- RDO000030 - 13-06-2023 - Regis Credidio Domingos de Campos-JULIANA X REGISDocumento2 páginasRDO000030 - 13-06-2023 - Regis Credidio Domingos de Campos-JULIANA X REGISAbidan GomesAinda não há avaliações
- CVL - Catálogo de Produtos-1Documento16 páginasCVL - Catálogo de Produtos-1vasevenAinda não há avaliações
- Apostila JavascriptDocumento154 páginasApostila Javascriptcaco3000Ainda não há avaliações
- ES-S-401 Montagem Estrutura Metalica Rev 6Documento27 páginasES-S-401 Montagem Estrutura Metalica Rev 6Manoel CosmeAinda não há avaliações
- TCC - Industria 4.0Documento20 páginasTCC - Industria 4.0Ednardo CostaAinda não há avaliações
- Planilha PCP ExemploDocumento510 páginasPlanilha PCP ExemploCleiton DenisAinda não há avaliações
- 0 Comandos EletricosDocumento143 páginas0 Comandos EletricosLeon Pereira PontesAinda não há avaliações
- Especificações JimnyDocumento7 páginasEspecificações JimnyalazzariAinda não há avaliações
- M700 Manual de Programação (Sistema Centro Máquina)Documento551 páginasM700 Manual de Programação (Sistema Centro Máquina)Vinicius Aguiar RochaAinda não há avaliações
- Catalogo EDFERDocumento36 páginasCatalogo EDFERCleiton BuzeliAinda não há avaliações
- Abnt Associação Brasileira de Normas TécnicasDocumento2 páginasAbnt Associação Brasileira de Normas TécnicasRenato VazAinda não há avaliações
- Atividade de Pesquisa 01Documento6 páginasAtividade de Pesquisa 01Juliano MartinsAinda não há avaliações
- Fundamentação Teórica (Convecção)Documento4 páginasFundamentação Teórica (Convecção)Myung Hee FigurAinda não há avaliações
- Catalogo Engetruck PDFDocumento4 páginasCatalogo Engetruck PDFcarlos76Ainda não há avaliações
- I Lista de ExerciciosDocumento2 páginasI Lista de ExerciciosVitor Hugo MelloAinda não há avaliações
- Dicas Rápidasfase (Phase) e Polaridade (Polarity) PDFDocumento11 páginasDicas Rápidasfase (Phase) e Polaridade (Polarity) PDFFernando José PeixotoAinda não há avaliações
- Codigos Secretos para GTA San Andreas PC PDFDocumento3 páginasCodigos Secretos para GTA San Andreas PC PDFEsvetcheazy Tuga Lanez Scott100% (9)
- Consumo de AguaDocumento36 páginasConsumo de AguaIgorpin2Ainda não há avaliações
- BDocumento71 páginasBkarentay56Ainda não há avaliações
- Notas Aula Radiologia IndustrialDocumento89 páginasNotas Aula Radiologia IndustrialJoao BatistaAinda não há avaliações
- PPCP - Exercícios de Planejamento AgregadoDocumento2 páginasPPCP - Exercícios de Planejamento AgregadoademirAinda não há avaliações
- Manual LB-15 - 16 - 18 REVM70100500656 PDFDocumento20 páginasManual LB-15 - 16 - 18 REVM70100500656 PDFDiego GoncalvesAinda não há avaliações
- Acionamentos HidráulicosDocumento33 páginasAcionamentos HidráulicosVinicius SessaAinda não há avaliações
- 25a50 IOM SHW Springer Midea Inverter 256.08.757 B 11 16 ViewDocumento44 páginas25a50 IOM SHW Springer Midea Inverter 256.08.757 B 11 16 ViewGondranAinda não há avaliações
- Biomecânica Básica dos Exercícios: Membros InferioresNo EverandBiomecânica Básica dos Exercícios: Membros InferioresNota: 3.5 de 5 estrelas3.5/5 (8)
- Treinamento cerebral: Compreendendo inteligência emocional, atenção e muito maisNo EverandTreinamento cerebral: Compreendendo inteligência emocional, atenção e muito maisNota: 4.5 de 5 estrelas4.5/5 (169)
- Cérebro Singular: Como estimular crianças no espectro autista ou com atrasos no desenvolvimentoNo EverandCérebro Singular: Como estimular crianças no espectro autista ou com atrasos no desenvolvimentoNota: 5 de 5 estrelas5/5 (1)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- 365 Ideias De Posts Para Ter Um Instagram De Sucesso!No Everand365 Ideias De Posts Para Ter Um Instagram De Sucesso!Ainda não há avaliações
- Dieta Anti-inflamatória EstratégicaNo EverandDieta Anti-inflamatória EstratégicaNota: 5 de 5 estrelas5/5 (2)
- Ser bom não é ser bonzinho: Como a comunicação não violenta e a arte do palhaço podem te ajudar a identificar e expressar as suas necessidades de maneira clara e autêntica – e evitar julgamentos, como o deste títuloNo EverandSer bom não é ser bonzinho: Como a comunicação não violenta e a arte do palhaço podem te ajudar a identificar e expressar as suas necessidades de maneira clara e autêntica – e evitar julgamentos, como o deste títuloNota: 5 de 5 estrelas5/5 (12)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)