Você também pode gostar
- AutocorrelaçãoDocumento5 páginasAutocorrelaçãoAnonymous b0cKPzDMqfAinda não há avaliações
- Comparação Entre Três Índices de ExatidãoDocumento9 páginasComparação Entre Três Índices de ExatidãoLarissa PereiraAinda não há avaliações
- CMB10 Vetores PDFDocumento22 páginasCMB10 Vetores PDFkleydson estevaoAinda não há avaliações
- UntitledDocumento4 páginasUntitledLuan AzevedoAinda não há avaliações
- Área Abaixo Da Curva - Calculo I - IntegralDocumento12 páginasÁrea Abaixo Da Curva - Calculo I - IntegralThalissa CozentinoAinda não há avaliações
- Capitulo 2 - Metodologia de Afonso AbrahamDocumento3 páginasCapitulo 2 - Metodologia de Afonso AbrahamAntonio De Sousa ToipyAinda não há avaliações
- Analise Quantitativa Cromatografia GasosaDocumento18 páginasAnalise Quantitativa Cromatografia GasosaPetra UllyAinda não há avaliações
- Aula9 - Correlação de PearsonDocumento24 páginasAula9 - Correlação de PearsonOrlando Eduardo FerriAinda não há avaliações
- Exemplos de Análise Descritiva e Inferencial para Ciências Sociais - Embrião para Futuro Livreto de Exercícios ResolvidosDocumento10 páginasExemplos de Análise Descritiva e Inferencial para Ciências Sociais - Embrião para Futuro Livreto de Exercícios ResolvidosDiogo FarinhaAinda não há avaliações
- Decomposição de QuadradosDocumento6 páginasDecomposição de QuadradosVERDADEILUMINADAAinda não há avaliações
- Robotic MaterialDocumento2 páginasRobotic MaterialisaacAinda não há avaliações
- MME-L9 Thiago CordeiroDocumento28 páginasMME-L9 Thiago CordeiroBruna VeigaAinda não há avaliações
- Analise DimensionalDocumento20 páginasAnalise DimensionalbprtxrcqilmqsvsdhrAinda não há avaliações
- Matemática 3º Ano - 4º Bimestre/2012 Plano de TrabalhoDocumento12 páginasMatemática 3º Ano - 4º Bimestre/2012 Plano de Trabalhojeronimo juniorAinda não há avaliações
- DEFINIÇÃO de RadiciaçãoDocumento2 páginasDEFINIÇÃO de Radiciaçãoanon-514691100% (1)
- Fenomenos de Transporte - Ebook - Un04Documento31 páginasFenomenos de Transporte - Ebook - Un04andregtoledoAinda não há avaliações
- Plano de Estudo - MarçoDocumento26 páginasPlano de Estudo - MarçoEduardoAinda não há avaliações
- Estatistica Aplicada A Química PDFDocumento5 páginasEstatistica Aplicada A Química PDFdelbianc9579Ainda não há avaliações
- Texto BaseDocumento10 páginasTexto BasegildemirAinda não há avaliações
- Coordenadas Esfericas PDFDocumento6 páginasCoordenadas Esfericas PDFJorge Eustáquio da SilvaAinda não há avaliações
- Métodos Numéricos 1Documento122 páginasMétodos Numéricos 1Eduardo HenriqueAinda não há avaliações
- Teoria de Correlação e Regressão - JELANE AFONSODocumento5 páginasTeoria de Correlação e Regressão - JELANE AFONSOCarlos Paulo Sassiqu AndrassoneAinda não há avaliações
- Resumo Mat Fis QuimDocumento61 páginasResumo Mat Fis QuimAcibnetAinda não há avaliações
- Erro Absoluto e RelativoDocumento22 páginasErro Absoluto e RelativoJessica Ramos de Barros BoloniniAinda não há avaliações
- Geometria EspacialDocumento44 páginasGeometria EspacialL.M.P GamesAinda não há avaliações
- Apostila Radiciação e Inicio de Equação 2º Grau 9° AnoDocumento12 páginasApostila Radiciação e Inicio de Equação 2º Grau 9° AnoMarcos Silva100% (2)
- Ajustamento de ObservaçõesDocumento95 páginasAjustamento de ObservaçõesGelito_MarcosAinda não há avaliações
- Correlação e RegressãoDocumento24 páginasCorrelação e RegressãoLuizAinda não há avaliações
- AV2 - GEOMETRIA ANALÍTICA e ÀLGEBRA LINEARDocumento19 páginasAV2 - GEOMETRIA ANALÍTICA e ÀLGEBRA LINEARmg6zjdcb8pAinda não há avaliações
- Fundamentos de Geometria II Aula 2Documento3 páginasFundamentos de Geometria II Aula 2Walter Santos100% (1)
- Aplicações de Matrizes - IanDocumento8 páginasAplicações de Matrizes - IanKaren Cristina GarciaAinda não há avaliações
- Mma11 Ta 5Documento6 páginasMma11 Ta 5carlosAinda não há avaliações
- Soluçao Prova Estrutura Da MatériaDocumento6 páginasSoluçao Prova Estrutura Da MatériafelzurcAinda não há avaliações
- Texto-Base - Razão e Proporção - Claudia de Oliveira - MATEMÁTICA ELEMENTAR - MAT009Documento3 páginasTexto-Base - Razão e Proporção - Claudia de Oliveira - MATEMÁTICA ELEMENTAR - MAT009Fernanda Cristina Cervantes YamauraAinda não há avaliações
- Relatório Provas de AferiçãoDocumento8 páginasRelatório Provas de AferiçãoruicoelhoAinda não há avaliações
- Avaliação II - Calculo NumericoDocumento4 páginasAvaliação II - Calculo NumericoDilson José Lins Rabelo100% (2)
- Exame - MatMulti - 2022-1 - ModeloADocumento9 páginasExame - MatMulti - 2022-1 - ModeloAdouglas pabloAinda não há avaliações
- Modelo Computacional e Reducao Entre Problemas - Pedro J. de RezendeDocumento12 páginasModelo Computacional e Reducao Entre Problemas - Pedro J. de Rezendevic1234059Ainda não há avaliações
- Curva Roc SpssDocumento10 páginasCurva Roc SpssThiago NevesAinda não há avaliações
- ANOVA Com RDocumento32 páginasANOVA Com RBruno SantosAinda não há avaliações
- Atividade de Revisão de Experimental Prova 3Documento6 páginasAtividade de Revisão de Experimental Prova 3jean.petterAinda não há avaliações
- Tarefa de Sistemas Digitais IIIDocumento13 páginasTarefa de Sistemas Digitais IIITHAYSA MOTAAinda não há avaliações
- 1 - Zeros de FuncoesDocumento23 páginas1 - Zeros de Funcoesrosangela lourenço de freitasAinda não há avaliações
- Prop. InversaDocumento13 páginasProp. Inversaluismoya99Ainda não há avaliações
- Problemas Sobre Mecanismos em 2023.1Documento37 páginasProblemas Sobre Mecanismos em 2023.1Wertson ResendeAinda não há avaliações
- Algoritmos Lógica de Programação - Avaliacao Bim1 2023-2 GabaritoDocumento15 páginasAlgoritmos Lógica de Programação - Avaliacao Bim1 2023-2 GabaritoOzzy DéiaAinda não há avaliações
- Aula 1 - GraficosDocumento12 páginasAula 1 - Graficospantolinio antonio fagundesAinda não há avaliações
- Plano de Estudo - MarçoDocumento18 páginasPlano de Estudo - MarçoEduardoAinda não há avaliações
- Correção Prova 1 - VccciniciusDocumento4 páginasCorreção Prova 1 - VccciniciusVinicius MendonçaAinda não há avaliações
- Retas Tangentes, Taxas de Variação e DerivadaDocumento12 páginasRetas Tangentes, Taxas de Variação e DerivadaJade VargasAinda não há avaliações
- Análise Comparativa Entre o Método de Newton-Raphson e Newton-Raphson Modificado Aplicados A Modelos Estruturais Bidimensionais e TridimensionaisDocumento11 páginasAnálise Comparativa Entre o Método de Newton-Raphson e Newton-Raphson Modificado Aplicados A Modelos Estruturais Bidimensionais e TridimensionaisBeatriz MartinhãoAinda não há avaliações
- Artigo Sobre Correlação e Regressão LinearDocumento13 páginasArtigo Sobre Correlação e Regressão LinearCatiagaspAinda não há avaliações
- Efeito Do Tipo de Refino de Malhas Não-Uniformes de VolumesDocumento15 páginasEfeito Do Tipo de Refino de Malhas Não-Uniformes de VolumesSolve ItAinda não há avaliações
- Calculo 1 - Volume 2 PDFDocumento134 páginasCalculo 1 - Volume 2 PDFMario EduardoAinda não há avaliações
- Aula de ExcelDocumento8 páginasAula de ExcelErik LottAinda não há avaliações
- O Ensino Da Matemática Na Educação Básica Através Do Software GeogebraNo EverandO Ensino Da Matemática Na Educação Básica Através Do Software GeogebraAinda não há avaliações
- Definicao de Um Processo Padrao para SoftwareDocumento16 páginasDefinicao de Um Processo Padrao para SoftwareWaterloo Ferreira da SilvaAinda não há avaliações
- Criando Jogos Com Python e PygameDocumento23 páginasCriando Jogos Com Python e PygameWaterloo Ferreira da SilvaAinda não há avaliações
- AGFCC - OracleDocumento838 páginasAGFCC - OracleWaterloo Ferreira da SilvaAinda não há avaliações
- Algoritmo BackpropagationDocumento20 páginasAlgoritmo BackpropagationWaterloo Ferreira da SilvaAinda não há avaliações
- Regressão Linear KaggleDocumento15 páginasRegressão Linear KaggleWaterloo Ferreira da SilvaAinda não há avaliações
- Como Construir Um Classificador de Machine Learning em Python Com Scikit-Learn - DigitalOceanDocumento10 páginasComo Construir Um Classificador de Machine Learning em Python Com Scikit-Learn - DigitalOceanWaterloo Ferreira da SilvaAinda não há avaliações
- Python Algoritmos e Estrutura de DadosDocumento142 páginasPython Algoritmos e Estrutura de DadosWaterloo Ferreira da Silva100% (1)
- Aprendizagem Profunda Com PythonDocumento110 páginasAprendizagem Profunda Com PythonWaterloo Ferreira da SilvaAinda não há avaliações
- Caderno de QuestõesDocumento9 páginasCaderno de QuestõesWaterloo Ferreira da SilvaAinda não há avaliações
- Como Criar Um Projeto de Data ScienceDocumento25 páginasComo Criar Um Projeto de Data ScienceWaterloo Ferreira da SilvaAinda não há avaliações
- Aula 2 - Conversao de Bases e Aritmetica ComputacionalDocumento130 páginasAula 2 - Conversao de Bases e Aritmetica ComputacionalWaterloo Ferreira da SilvaAinda não há avaliações
- Comandos PandasDocumento4 páginasComandos PandasWaterloo Ferreira da SilvaAinda não há avaliações
- Leia A Parlenda E Depois Responda À Questão: Com Qual Palavra Rima VeludoDocumento10 páginasLeia A Parlenda E Depois Responda À Questão: Com Qual Palavra Rima VeludoWellington SantanaAinda não há avaliações
- Thomas WolfeDocumento3 páginasThomas WolfeAnabela Rosa RosaAinda não há avaliações
- Mapa Mental Tecido MuscularDocumento1 páginaMapa Mental Tecido MuscularandressalopesmmAinda não há avaliações
- Esqueleto-Apendicular Com Imagens para FixaçaoDocumento23 páginasEsqueleto-Apendicular Com Imagens para FixaçaoRosangela FonsecaAinda não há avaliações
- Aula Reino Plantae - Resumo AngiospermasDocumento3 páginasAula Reino Plantae - Resumo AngiospermasEwerthon GomesAinda não há avaliações
- Decreto #9785 de 7 de Maio de 2019Documento27 páginasDecreto #9785 de 7 de Maio de 2019nelson during100% (3)
- Diario CartograficoDocumento2 páginasDiario CartograficoTANIAMSMAinda não há avaliações
- Organização Pessoal ApresentaçãoDocumento25 páginasOrganização Pessoal ApresentaçãoMarcelo FernándezAinda não há avaliações
- A Epistemologia e A Psicologia Genética de Jean PiagetDocumento22 páginasA Epistemologia e A Psicologia Genética de Jean PiagetHiago Carvalho100% (1)
- Elaborar Prova ContextualizadaDocumento16 páginasElaborar Prova ContextualizadaAna LouAinda não há avaliações
- Geografia - Diversidade ÉtnicaDocumento7 páginasGeografia - Diversidade ÉtnicaJosue felipe BarbosaAinda não há avaliações
- Catálogo Neodent 2015Documento210 páginasCatálogo Neodent 2015Larissa Sestari100% (1)
- 2 - Inglês Técnico 1aDocumento33 páginas2 - Inglês Técnico 1aOrlando Schetino ValenteAinda não há avaliações
- Bolsas e Sapatos (20 Artigos)Documento30 páginasBolsas e Sapatos (20 Artigos)Maira SiqueiraAinda não há avaliações
- Cap. 04 - Geometria, Ideias Intuitivas.Documento3 páginasCap. 04 - Geometria, Ideias Intuitivas.Douglas OliveiraAinda não há avaliações
- A Brazileira de Prazins de Camilo Castelo BrancoDocumento262 páginasA Brazileira de Prazins de Camilo Castelo BrancoMaria do Rosário Monteiro100% (2)
- Renovaçoes 2022.jan DezDocumento390 páginasRenovaçoes 2022.jan DezCamilla DinizAinda não há avaliações
- 17 - Batalha EspiritualDocumento211 páginas17 - Batalha EspiritualGabriel Cachoeira100% (2)
- Alexandre Ordem Paranormal Wiki FandomDocumento2 páginasAlexandre Ordem Paranormal Wiki FandomIevan polkaAinda não há avaliações
- Resumos Psicologia 1Documento8 páginasResumos Psicologia 1Francisca AlmeidaAinda não há avaliações
- 08 - Olavo de Carvalho - Advento Do CristianismoDocumento35 páginas08 - Olavo de Carvalho - Advento Do CristianismomauricioAinda não há avaliações
- Lista 05 Quantidades e Medidas e EstequiometriaDocumento4 páginasLista 05 Quantidades e Medidas e EstequiometriaPaula VitóriaAinda não há avaliações
- Guia Resistencia QuimicaDocumento4 páginasGuia Resistencia QuimicaAnonymous yX0AHnvCAinda não há avaliações
- Critérios de MediçãoDocumento39 páginasCritérios de MediçãoFlavio PenhaAinda não há avaliações
- Manual de ProjetosDocumento226 páginasManual de ProjetosbetobragajrAinda não há avaliações
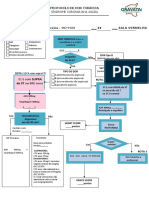
- Protocolo de Dor TorácicaDocumento2 páginasProtocolo de Dor Torácicamedicos.upamoradasAinda não há avaliações
- Planilha Orçamentária Da ObraDocumento2 páginasPlanilha Orçamentária Da ObraRoberval TelesAinda não há avaliações
- 2ºTesteVocacionalMód 7-ProporcionalidadesDocumento3 páginas2ºTesteVocacionalMód 7-ProporcionalidadesEleuterio MonteiroAinda não há avaliações
- O Abuso Sexual, Estudo de Casos em Cenas Incestuosas PDFDocumento9 páginasO Abuso Sexual, Estudo de Casos em Cenas Incestuosas PDFAléxia VegaAinda não há avaliações