Você também pode gostar
- Controle de Processos Industriais: Modelagem e Simulação com ScilabNo EverandControle de Processos Industriais: Modelagem e Simulação com ScilabNota: 5 de 5 estrelas5/5 (1)
- Controle de Processos Industriais - Vol. 2: Estratégias modernasNo EverandControle de Processos Industriais - Vol. 2: Estratégias modernasNota: 5 de 5 estrelas5/5 (1)
- Introdução às linguagens de programação para CLPNo EverandIntrodução às linguagens de programação para CLPAinda não há avaliações
- O Ciclo Total de Vida das Instalações em Atmosferas Explosivas: The total life cycle of installations in explosive atmospheresNo EverandO Ciclo Total de Vida das Instalações em Atmosferas Explosivas: The total life cycle of installations in explosive atmospheresNota: 3 de 5 estrelas3/5 (2)
- Aplicação fuzzy x pid: técnicas de controle em ambientes simuladosNo EverandAplicação fuzzy x pid: técnicas de controle em ambientes simuladosAinda não há avaliações
- Instrumentação Industrial: Sensores e SaídasDocumento87 páginasInstrumentação Industrial: Sensores e SaídasRafael Marques100% (1)
- Controle de Processos IndustriaisDocumento33 páginasControle de Processos IndustriaisbrenbraAinda não há avaliações
- Instrumentação Industrial - SimbologiaDocumento67 páginasInstrumentação Industrial - SimbologiaJohnata França100% (2)
- Ri 1303 Redes IndustriaisDocumento397 páginasRi 1303 Redes IndustriaisBruno Souza100% (1)
- Eng Eletrico Instr - Tecnicas - Automacao - CLP - UNICAMPDocumento115 páginasEng Eletrico Instr - Tecnicas - Automacao - CLP - UNICAMPlfrn2004100% (6)
- Redes industriais: PROFIBUS, DeviceNet, AS-interface e Modbus RTUDocumento26 páginasRedes industriais: PROFIBUS, DeviceNet, AS-interface e Modbus RTUGustavo Augusto100% (4)
- Teoria de Controle PIDDocumento9 páginasTeoria de Controle PIDVictor_Rocha100% (5)
- Introdução ao Curso de Instrumentação BásicaDocumento45 páginasIntrodução ao Curso de Instrumentação BásicaLeonam CordeiroAinda não há avaliações
- Acionamentos de velocidade variável: Conhecimentos básicos Fundamentais - Instruções gerais para acionamentos elétricos regulados em velocidade variável e em corrente alternadaNo EverandAcionamentos de velocidade variável: Conhecimentos básicos Fundamentais - Instruções gerais para acionamentos elétricos regulados em velocidade variável e em corrente alternadaAinda não há avaliações
- Instrumentista Montador - Tecnicas de Montagem e Instalacao de InstrumentacaoDocumento82 páginasInstrumentista Montador - Tecnicas de Montagem e Instalacao de InstrumentacaoLuiz Claudio100% (2)
- Mecatrônica de Garagem BlogDocumento216 páginasMecatrônica de Garagem BlogLucas AntunesAinda não há avaliações
- Eng Prod TópicosDocumento113 páginasEng Prod TópicosGiovani CorreaAinda não há avaliações
- Instr Mod Basico InstrumentacaoDocumento143 páginasInstr Mod Basico Instrumentacaojdsa123100% (1)
- Instrumentacao ControleDocumento104 páginasInstrumentacao ControleCarlos Alberto100% (3)
- Apostila de CLP - Blocos LogicosDocumento32 páginasApostila de CLP - Blocos Logicosjucadosb100% (4)
- Instrumentação IndustrialDocumento93 páginasInstrumentação Industrialclaudioandrevalverde100% (1)
- Redes de Comunicação em AutomaçãoDocumento37 páginasRedes de Comunicação em AutomaçãoLuiz Santos ResendeAinda não há avaliações
- SCADA IntouchDocumento32 páginasSCADA IntoucheumetallicaAinda não há avaliações
- Apostila CLP CompletaDocumento87 páginasApostila CLP CompletaEvandro Duarte100% (1)
- Apostila01 Automacao e Instrumentacao IndustrialDocumento115 páginasApostila01 Automacao e Instrumentacao IndustrialMoisésDárioSilvaAinda não há avaliações
- Metrologia e Instrumentação PDFDocumento130 páginasMetrologia e Instrumentação PDFYuri Brambila100% (1)
- Treinamento ControlLogixDocumento32 páginasTreinamento ControlLogixRenato CarvalhoAinda não há avaliações
- Instrumentacao 13a - Marco Antonio RibeiroDocumento340 páginasInstrumentacao 13a - Marco Antonio Ribeiroreydascalhas67% (3)
- Rockwell Flexlogix ComunicaçõesDocumento220 páginasRockwell Flexlogix ComunicaçõesMiguelGSilvaAinda não há avaliações
- Configurar comunicação RSLogix-IntouchDocumento13 páginasConfigurar comunicação RSLogix-IntouchDavson Filho100% (2)
- Introdução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No ArduinoNo EverandIntrodução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No ArduinoAinda não há avaliações
- Teoria Dos Servomecanismos E Do Controle AutomáticoNo EverandTeoria Dos Servomecanismos E Do Controle AutomáticoAinda não há avaliações
- Desenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoNo EverandDesenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoAinda não há avaliações
- Processos Industriais: Unidade de Extração SupercríticaNo EverandProcessos Industriais: Unidade de Extração SupercríticaNota: 3.5 de 5 estrelas3.5/5 (3)
- Aterramento em atmosferas explosivas: Práticas recomendadasNo EverandAterramento em atmosferas explosivas: Práticas recomendadasNota: 5 de 5 estrelas5/5 (2)
- Como Criar Sub-redes Em Redes IpNo EverandComo Criar Sub-redes Em Redes IpAinda não há avaliações
- Filtro Ativo de Potência e Armazenamento em Sistemas de Distribuição: uma Busca pela Qualidade e Eficiência Energética em Sistemas com Geração IntermitenteNo EverandFiltro Ativo de Potência e Armazenamento em Sistemas de Distribuição: uma Busca pela Qualidade e Eficiência Energética em Sistemas com Geração IntermitenteAinda não há avaliações
- Modelagem e Simulação de Processos Dinâmicos Aplicados às Engenharias Química, de Bioprocessos, Elétrica, Mecânica, de Controle, Aeroespacial e Fluidodinâmica ComputacionalNo EverandModelagem e Simulação de Processos Dinâmicos Aplicados às Engenharias Química, de Bioprocessos, Elétrica, Mecânica, de Controle, Aeroespacial e Fluidodinâmica ComputacionalAinda não há avaliações
- Mecânica dos fluidos: Noções e aplicaçõesNo EverandMecânica dos fluidos: Noções e aplicaçõesNota: 3.5 de 5 estrelas3.5/5 (3)
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNo EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoAinda não há avaliações
- Tratamento de água para hemodiálise: conceitos e recomendaçõesNo EverandTratamento de água para hemodiálise: conceitos e recomendaçõesNota: 4 de 5 estrelas4/5 (1)
- Dominando Sub-redes No Ipv4 E No Ipv6No EverandDominando Sub-redes No Ipv4 E No Ipv6Ainda não há avaliações
- Equipamentos Eletromédicos: Requisitos da série de normas técnicas ABNT NBR IEC 60601No EverandEquipamentos Eletromédicos: Requisitos da série de normas técnicas ABNT NBR IEC 60601Nota: 3 de 5 estrelas3/5 (2)
- Tolerâncias, ajustes, desvios e análise de dimensões: Princípios de engenharia de fabricação mecânicaNo EverandTolerâncias, ajustes, desvios e análise de dimensões: Princípios de engenharia de fabricação mecânicaAinda não há avaliações
- Aplicação de Técnicas de Inteligência ArtificialDocumento11 páginasAplicação de Técnicas de Inteligência ArtificialHugo Sérgio L. AraújoAinda não há avaliações
- Plano de Ensino - Inversores de Frequência e Soft-StarterDocumento7 páginasPlano de Ensino - Inversores de Frequência e Soft-StarterjoelsonAinda não há avaliações
- Sistemas operacionais de tempo real e sua aplicação em sistemas embarcadosNo EverandSistemas operacionais de tempo real e sua aplicação em sistemas embarcadosAinda não há avaliações
- Abraman 2020Documento94 páginasAbraman 2020Qeng eletricaAinda não há avaliações
- Estudo Contínuo Sobre Os Recursos Da Planta SMAR - Modelo CBA - Rev3Documento6 páginasEstudo Contínuo Sobre Os Recursos Da Planta SMAR - Modelo CBA - Rev3Franciane MorenoAinda não há avaliações
- Ensaios de Campo e Modelagem Dos Reguladores de Tensão Da Usina Termelétrica Presidente Médici Fase BDocumento6 páginasEnsaios de Campo e Modelagem Dos Reguladores de Tensão Da Usina Termelétrica Presidente Médici Fase BDouglas FurtadoAinda não há avaliações
- Apostila de EletricidadeDocumento39 páginasApostila de EletricidadecaldaspachecoAinda não há avaliações
- WEG Rele Programavel Clic 02 3rd Manual Portugues BRDocumento216 páginasWEG Rele Programavel Clic 02 3rd Manual Portugues BRnerocrAinda não há avaliações
- 6d - RESOLUÇÃO EXPONENCIAL PDFDocumento1 página6d - RESOLUÇÃO EXPONENCIAL PDFflavianopbAinda não há avaliações
- Fasores AplicaçãoDocumento22 páginasFasores AplicaçãoHilmar BastosAinda não há avaliações
- 3 - 1 - SimbologiaDocumento127 páginas3 - 1 - SimbologiaScarlett CaribéAinda não há avaliações
- MarCom - Smart Sensor - 20170602 - DF - PT - Rev 3Documento4 páginasMarCom - Smart Sensor - 20170602 - DF - PT - Rev 3flavianopbAinda não há avaliações
- Dialnet ExercicioResistidoComPesosNaReducaoDeGorduraCorpor 4837915Documento5 páginasDialnet ExercicioResistidoComPesosNaReducaoDeGorduraCorpor 4837915flavianopbAinda não há avaliações
- Alimentação Saudável FitDocumento16 páginasAlimentação Saudável FitflavianopbAinda não há avaliações
- 6e - RESOLUÇÃO SENO PDFDocumento1 página6e - RESOLUÇÃO SENO PDFflavianopbAinda não há avaliações
- Exercícios Eletrônica Digital RevisãoDocumento3 páginasExercícios Eletrônica Digital RevisãoflavianopbAinda não há avaliações
- Potências de base 10 - Cálculos com notação científicaDocumento2 páginasPotências de base 10 - Cálculos com notação científicaflavianopbAinda não há avaliações
- Artigo Sobre Os DiscentesDocumento25 páginasArtigo Sobre Os DiscentesflavianopbAinda não há avaliações
- CALCULO1-MAUROPATRAO - Prof. MARCOSDocumento173 páginasCALCULO1-MAUROPATRAO - Prof. MARCOSMarcos AparriAinda não há avaliações
- As 10 Melhores Formas de Estudo PDFDocumento10 páginasAs 10 Melhores Formas de Estudo PDFflavianopbAinda não há avaliações
- Modos Gregos – Curso completo sobre os sete modos gregosDocumento38 páginasModos Gregos – Curso completo sobre os sete modos gregosAlan Barroso81% (16)
- Lei Municipal #1588 de 2002Documento4 páginasLei Municipal #1588 de 2002flavianopbAinda não há avaliações
- JFL Catalogos Comparativos Linha Bus JFL AlarmesDocumento1 páginaJFL Catalogos Comparativos Linha Bus JFL AlarmesflavianopbAinda não há avaliações
- Runi03 2009Documento2 páginasRuni03 2009flavianopbAinda não há avaliações
- Histórico Das Taxas de Juros - SELICDocumento4 páginasHistórico Das Taxas de Juros - SELICflavianopbAinda não há avaliações
- Manual Do Usuário SAMSUNG ML 3710ND PDocumento10 páginasManual Do Usuário SAMSUNG ML 3710ND PflavianopbAinda não há avaliações
- Motores CC WEG até 10 MWDocumento8 páginasMotores CC WEG até 10 MWRamon Da MattaAinda não há avaliações
- Escala de LikertDocumento78 páginasEscala de LikertflavianopbAinda não há avaliações
- Edital 2008Documento9 páginasEdital 2008flavianopbAinda não há avaliações
- 1 PBDocumento11 páginas1 PBflavianopbAinda não há avaliações
- Manualmotores PDFDocumento59 páginasManualmotores PDFflavianopbAinda não há avaliações
- 0 - A ONU e Pessoas Com DeficiênciaDocumento4 páginas0 - A ONU e Pessoas Com DeficiênciaflavianopbAinda não há avaliações
- Normalizacao IEC61131Documento7 páginasNormalizacao IEC61131ivanpalmeidaAinda não há avaliações
- Manual de Elaboração de Projeto - BSI (2014)Documento42 páginasManual de Elaboração de Projeto - BSI (2014)flavianopbAinda não há avaliações
- Apresentação Questionário BPC Na Escola Estado Minas Gerais 01-07-13Documento36 páginasApresentação Questionário BPC Na Escola Estado Minas Gerais 01-07-13flavianopbAinda não há avaliações
- Portariaprogep-Cci 001 2011Documento9 páginasPortariaprogep-Cci 001 2011flavianopbAinda não há avaliações
- Ed 78 2023 CP Prof 10dvzDocumento38 páginasEd 78 2023 CP Prof 10dvzLola MarconAinda não há avaliações
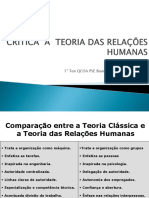
- Comparação Teorias Clássica x Relações HumanasDocumento13 páginasComparação Teorias Clássica x Relações HumanasWagner CruzAinda não há avaliações
- RELATÓRIO DE PROJETO FUNDIÇÃO - FinalDocumento13 páginasRELATÓRIO DE PROJETO FUNDIÇÃO - FinalVinicius CamposAinda não há avaliações
- Manual Aluno PDFDocumento20 páginasManual Aluno PDFRose OliveiraAinda não há avaliações
- Neuropsicologia do envelhecimentoDocumento37 páginasNeuropsicologia do envelhecimentoJoão Paulo MoraisAinda não há avaliações
- Critérios Ex Filosofia Época Especial 2014Documento13 páginasCritérios Ex Filosofia Época Especial 2014Anonymous U5LxkSAinda não há avaliações
- Princípios e sistemas de treinamento resistidoDocumento45 páginasPrincípios e sistemas de treinamento resistidoDanielBCAinda não há avaliações
- Acentuação de PalavrasDocumento44 páginasAcentuação de PalavrasEvandro RibeiroAinda não há avaliações
- Coloração PapanicolaouDocumento1 páginaColoração PapanicolaouNessa Lopes100% (1)
- Teóricos do AbsolutismoDocumento4 páginasTeóricos do AbsolutismoPedro BertonciniAinda não há avaliações
- Programação CLP transportadorDocumento29 páginasProgramação CLP transportadorMárcio HonórioAinda não há avaliações
- DIRETRIZ CNBC 01-2012 Codigo Ética Bombeiro Civil e Pessoal de Serviços de Emergências - 4a EdDocumento15 páginasDIRETRIZ CNBC 01-2012 Codigo Ética Bombeiro Civil e Pessoal de Serviços de Emergências - 4a Edivan pesquisaAinda não há avaliações
- Energia eólica: uma fonte limpa, eficiente e segura de energiaDocumento1 páginaEnergia eólica: uma fonte limpa, eficiente e segura de energiaSTEPHANIE SIQUEIRA VASCONCELOSAinda não há avaliações
- Manual Técnico VMK6Documento5 páginasManual Técnico VMK6TV Web CLDFAinda não há avaliações
- Deficiência Intelectual e Um Plano de AulaDocumento3 páginasDeficiência Intelectual e Um Plano de AulaJair Gomes100% (1)
- Manual de Instrução e Montagem Balancim Série G2 Evolution ElétricoDocumento45 páginasManual de Instrução e Montagem Balancim Série G2 Evolution ElétricoLUCASAinda não há avaliações
- SKF PER.5203RYY2 SpecificationDocumento2 páginasSKF PER.5203RYY2 SpecificationRanielAinda não há avaliações
- Programa de Ação 2023 ProfessorDocumento7 páginasPrograma de Ação 2023 ProfessorEverton Silva100% (1)
- Isomeria geométrica e óptica no ibuprofenoDocumento7 páginasIsomeria geométrica e óptica no ibuprofenoRhuan MendesAinda não há avaliações
- As Leis Universais do Sucesso de Brian TracyDocumento12 páginasAs Leis Universais do Sucesso de Brian TracyCarlos Eduardo Gomes100% (2)
- Wa0051 PDFDocumento106 páginasWa0051 PDFcicero melo100% (1)
- Economia A: Elsa Silva Helena MendesDocumento26 páginasEconomia A: Elsa Silva Helena MendesHugo Santos100% (1)
- Produção Do CobreDocumento11 páginasProdução Do CobreFagner BorgesAinda não há avaliações
- Catálogo Serviços de Emergência - TECNIQUITELDocumento52 páginasCatálogo Serviços de Emergência - TECNIQUITELTECNIQUITELAinda não há avaliações
- Teoria Geral e Metodologia do EsporteDocumento7 páginasTeoria Geral e Metodologia do Esportelucianolopes100% (1)
- 6694PB Catálogo de Rolamentos Automotivo PDFDocumento434 páginas6694PB Catálogo de Rolamentos Automotivo PDFAurora VelasquezAinda não há avaliações
- Deus criou os números inteirosDocumento23 páginasDeus criou os números inteirosEdicleyto SantanaAinda não há avaliações
- Trabalho Equações Do 2° Grau - AdaptadaDocumento2 páginasTrabalho Equações Do 2° Grau - AdaptadaGessica ByczkovskiAinda não há avaliações
- Patologias Do ConcretoDocumento6 páginasPatologias Do ConcretoEliezerAinda não há avaliações