Você também pode gostar
- PMCanvasDocumento2 páginasPMCanvasIcantsleep and I don't even want toAinda não há avaliações
- Pid Digital EmbarcadosDocumento44 páginasPid Digital EmbarcadosThiago WerneckAinda não há avaliações
- Simo CodeDocumento20 páginasSimo CodeJaudir LopesAinda não há avaliações
- Cms Files 309021 1630329626manual cck6700sDocumento19 páginasCms Files 309021 1630329626manual cck6700sWesley pereira de paulaAinda não há avaliações
- Ged 10126Documento19 páginasGed 10126Rafael StringuesAinda não há avaliações
- 7 Controlador PID Ademar 20092Documento19 páginas7 Controlador PID Ademar 20092Léo NotzAinda não há avaliações
- AP CLP Rev00Documento24 páginasAP CLP Rev00Edson DinizAinda não há avaliações
- AULA 02 - História e Arquitetura Dos ClpsDocumento10 páginasAULA 02 - História e Arquitetura Dos ClpsGustavo da SilvaAinda não há avaliações
- Ampliação de Subestação 138-69 KV e 13.8-11.9 KV em Regime DDocumento51 páginasAmpliação de Subestação 138-69 KV e 13.8-11.9 KV em Regime DAdilson Leite ProençaAinda não há avaliações
- Módulo 3 - Automação de Processos Industriais PDFDocumento76 páginasMódulo 3 - Automação de Processos Industriais PDFWilliam Will Controle WoodwardAinda não há avaliações
- Apostlia CLPDocumento80 páginasApostlia CLPHeidi ThompsonAinda não há avaliações
- Teoria de CLPDocumento24 páginasTeoria de CLPDanilo HenriqueAinda não há avaliações
- Trabalho Av2 1Documento6 páginasTrabalho Av2 1Lincoln AlexandreAinda não há avaliações
- PDF10220900Documento12 páginasPDF102209002i Eletrônica Industrial LTDAAinda não há avaliações
- Ged 4732Documento55 páginasGed 4732Tiago Ortiz De OliveiraAinda não há avaliações
- Int Proj de Sist Digitais em FPGADocumento43 páginasInt Proj de Sist Digitais em FPGAJOSE NETOAinda não há avaliações
- Câmara de Conservação Indrel - ServiçoDocumento39 páginasCâmara de Conservação Indrel - Serviçorodrigo.rodovalhoAinda não há avaliações
- Relatório Do Circuito - Prova 2Documento2 páginasRelatório Do Circuito - Prova 2brunno.vargasAinda não há avaliações
- Análise TécnicaDocumento121 páginasAnálise TécnicaAmaury Berteli100% (1)
- Implementação de Um Controlador Pid para o Rastreamento Da Velocidade Angular de Um Motor CCDocumento5 páginasImplementação de Um Controlador Pid para o Rastreamento Da Velocidade Angular de Um Motor CCDébora PossaAinda não há avaliações
- Resumo nbr16521Documento2 páginasResumo nbr16521Gabriel Vinícius Magalhães PereiraAinda não há avaliações
- Controladores ProgamáveisDocumento40 páginasControladores ProgamáveisEverton Junqueira da Silva100% (1)
- D-AHU Modular R - Product Profile - ECPPT17-485 - PortugueseDocumento8 páginasD-AHU Modular R - Product Profile - ECPPT17-485 - PortugueseRui Pedro Goncalves de FreitasAinda não há avaliações
- Ged 196Documento18 páginasGed 196transformadoreszagolaboratorioAinda não há avaliações
- Automação de Uma Retifica TrapezoidalDocumento4 páginasAutomação de Uma Retifica TrapezoidalluizrcspradoAinda não há avaliações
- Apostila CLP.Documento25 páginasApostila CLP.Well RochaAinda não há avaliações
- Manual Instalacoes Accor 2010 R2Documento169 páginasManual Instalacoes Accor 2010 R2Giuliano Bandoli100% (1)
- RI-S9 - Modo de CompatibilidadeDocumento38 páginasRI-S9 - Modo de CompatibilidadeLuiz Felipe RodriguesAinda não há avaliações
- PROPOSTA TECNICA COMERCIAL - 1312-1-22-R0 - Contrato de Manutenção Anual - IGREJA MESSIANICADocumento3 páginasPROPOSTA TECNICA COMERCIAL - 1312-1-22-R0 - Contrato de Manutenção Anual - IGREJA MESSIANICAHenrique previteroAinda não há avaliações
- Prop CantDocumento12 páginasProp CantFelipe SilvestreAinda não há avaliações
- Automação Industrial em Todos Os NíveisDocumento44 páginasAutomação Industrial em Todos Os NíveisDouglas RobertoAinda não há avaliações
- Ebook Desempenho Termico Sob A Otica Da NBR 15575 Ca2wordDocumento29 páginasEbook Desempenho Termico Sob A Otica Da NBR 15575 Ca2wordThais Mendes SampaioAinda não há avaliações
- Trabalho Instrumentação Industrial Ivan R. PolettoDocumento5 páginasTrabalho Instrumentação Industrial Ivan R. PolettoIvan Pamela PolettoAinda não há avaliações
- Relatorio SDCD FoxboroDocumento17 páginasRelatorio SDCD FoxboroDouglas FernandoAinda não há avaliações
- ICV - Português 2012Documento4 páginasICV - Português 2012Carlos CarreraAinda não há avaliações
- CLP Exeercicios Unidade I Rev ADocumento16 páginasCLP Exeercicios Unidade I Rev ALopos PoloAinda não há avaliações
- Cat Aircenter Scroll R32 CC-ACS-06202301 VirtualDocumento8 páginasCat Aircenter Scroll R32 CC-ACS-06202301 VirtualJoão Rodrigo ClimasulAinda não há avaliações
- Elétrica - CPFL - Ged 6421 - 4 MedidoresDocumento25 páginasElétrica - CPFL - Ged 6421 - 4 Medidoresjorgeas41100% (1)
- Portfólio - Eng. Higor CamiloDocumento5 páginasPortfólio - Eng. Higor CamiloHigor Laurindo CamiloAinda não há avaliações
- GED-196 TransformadoresDocumento17 páginasGED-196 TransformadoresBiasetti José AntonioAinda não há avaliações
- Cartilha Orientativa - Orçamento Estimado - MinigeraçãoDocumento14 páginasCartilha Orientativa - Orçamento Estimado - MinigeraçãoHudenskiAinda não há avaliações
- Normas em Face - Mudanças em Documentação para ProjetistasDocumento1 páginaNormas em Face - Mudanças em Documentação para ProjetistasGracinha SampaioAinda não há avaliações
- Catalogo Geral ICF 2020Documento51 páginasCatalogo Geral ICF 2020leticiaAinda não há avaliações
- LuzerneDocumento4 páginasLuzerneLazhar HouidhegAinda não há avaliações
- Aula 1 - Introdução Ao PLCDocumento53 páginasAula 1 - Introdução Ao PLCDouglas SantosAinda não há avaliações
- Como Transformar LCD Paralelo em SerialDocumento6 páginasComo Transformar LCD Paralelo em SerialDaniel Lima da PazAinda não há avaliações
- CLP PTCCDocumento17 páginasCLP PTCCNelson Ananias ChauAinda não há avaliações
- Catalogo InversoresDocumento10 páginasCatalogo InversoresYeda MartinsAinda não há avaliações
- Ged 4732Documento47 páginasGed 4732Lucas Costa Honório da SilvaAinda não há avaliações
- Modelo de Proposta Projeto de Combate A IncendioDocumento3 páginasModelo de Proposta Projeto de Combate A IncendioRafael SchroderAinda não há avaliações
- Apresentação - Como Atender A Norma de Desempenho de Edificações - Jucélia GealhDocumento37 páginasApresentação - Como Atender A Norma de Desempenho de Edificações - Jucélia GealhAlex GodoyAinda não há avaliações
- Estudo de Caso - Processo de Vaporização de GLPDocumento5 páginasEstudo de Caso - Processo de Vaporização de GLPJosé José JoséAinda não há avaliações
- Memorial Descritivo Simplificado Grupos Ae BDocumento3 páginasMemorial Descritivo Simplificado Grupos Ae BrjsfplaAinda não há avaliações
- Q-DAS Treinamento Modulo 1Documento108 páginasQ-DAS Treinamento Modulo 1KAMI_WAVE1078Ainda não há avaliações
- Folder Diesel Bancada Dci700 2019Documento6 páginasFolder Diesel Bancada Dci700 2019Elson DorigonAinda não há avaliações
- MicroCPD Guia Rápido de InstalaçãoDocumento52 páginasMicroCPD Guia Rápido de InstalaçãoAlailson Barbosa RibeiroAinda não há avaliações
- HI Tecnologia: Notas de AplicaçãoDocumento20 páginasHI Tecnologia: Notas de AplicaçãoEduardo Cinesio Costa da SilvaAinda não há avaliações
- Cap. 00 - Capítulo GeralDocumento16 páginasCap. 00 - Capítulo GeralRicardo TsuyamaAinda não há avaliações
- Ciclo de Quatro TemposDocumento4 páginasCiclo de Quatro TemposKaline OliveiraAinda não há avaliações
- Inversor de Frequência: 20 Hrs João FilhoDocumento56 páginasInversor de Frequência: 20 Hrs João FilhoKaline OliveiraAinda não há avaliações
- QuestoesDocumento6 páginasQuestoesKaline Oliveira100% (2)
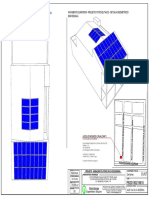
- Projeto CompletoDocumento7 páginasProjeto CompletoKaline Oliveira100% (1)