Você também pode gostar
- 7.3 IR-006-DOF-DA-CBMRS-Água-esgoto-e-energia-elétrica-1Documento13 páginas7.3 IR-006-DOF-DA-CBMRS-Água-esgoto-e-energia-elétrica-1Rafael FogaçaAinda não há avaliações
- 1 Lei Da TermodinâmicaDocumento27 páginas1 Lei Da TermodinâmicaAndre Luis LuisAinda não há avaliações
- Experimento de OerstedDocumento3 páginasExperimento de OerstedAna Júlia SilvaAinda não há avaliações
- Potência em TransformadoresDocumento8 páginasPotência em TransformadoresRodrigo Ruy BoguskiAinda não há avaliações
- Medidas de Controle Do Risco Elétrico (NR-10)Documento53 páginasMedidas de Controle Do Risco Elétrico (NR-10)CAIOAinda não há avaliações
- Aço Ferramenta AISI 420 PDFDocumento2 páginasAço Ferramenta AISI 420 PDFRobson PereiraAinda não há avaliações
- Apresentação CX Automatizada Padrão MANDocumento96 páginasApresentação CX Automatizada Padrão MANjohnny sabin100% (1)
- K 608211 Mic LX30BR PDFDocumento75 páginasK 608211 Mic LX30BR PDFwilsonwdar100% (1)
- 1º Mini-Teste - 12 ClasseDocumento2 páginas1º Mini-Teste - 12 ClasseCândido GuirrutaAinda não há avaliações
- Livro Texto 2 - Química OrgânicaDocumento30 páginasLivro Texto 2 - Química OrgânicaLoruama FerreiraAinda não há avaliações
- 15-Aula 3 - Separacao de Misturas 3 - 1 AnoDocumento70 páginas15-Aula 3 - Separacao de Misturas 3 - 1 AnoEdy CiprianoAinda não há avaliações
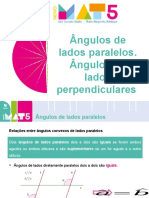
- Ângulos de Lados Paralelos. Ângulos de Lados Perpendiculares.Documento9 páginasÂngulos de Lados Paralelos. Ângulos de Lados Perpendiculares.PaulaDantasOliveiraAinda não há avaliações
- Manual - Operações de Combate A IncêndiosDocumento41 páginasManual - Operações de Combate A IncêndiosAna Bya Suzuki100% (1)
- Trabalho Ciclo OTTO Com ExerciciosDocumento30 páginasTrabalho Ciclo OTTO Com ExerciciosMiguelAinda não há avaliações
- Apostila Calculo1a 2020 1Documento88 páginasApostila Calculo1a 2020 1Samea HudsonAinda não há avaliações
- Inversores de Frequência - 070214Documento6 páginasInversores de Frequência - 070214RonaldoAinda não há avaliações
- Plano Manutencao Preventiva AnualDocumento5 páginasPlano Manutencao Preventiva AnualBetonellAinda não há avaliações
- Divisao Lamina CPDG500 SILENCIADODocumento4 páginasDivisao Lamina CPDG500 SILENCIADORODRIGO_RALOAinda não há avaliações
- Medidor de Vazao Tipo Rotametro BLIDocumento5 páginasMedidor de Vazao Tipo Rotametro BLIIsadora Freitas de SaAinda não há avaliações
- Tipos de FiltrosDocumento16 páginasTipos de FiltrosJefferson MonteiroAinda não há avaliações
- Saiba A Equivalência Das Lâmpadas - LumilandiaDocumento7 páginasSaiba A Equivalência Das Lâmpadas - LumilandiaALEXANDRE DE MORAESAinda não há avaliações
- 7743 - FispqDocumento4 páginas7743 - FispqRudinei MartinianoAinda não há avaliações
- AL Movimento Vertical de Queda e Ressalto de Uma BolaDocumento22 páginasAL Movimento Vertical de Queda e Ressalto de Uma BolaRafael Barros100% (3)
- Prova Abendi Me - 02Documento7 páginasProva Abendi Me - 02agustpassos100% (2)
- Atividade58628 060321085616Documento5 páginasAtividade58628 060321085616Ubirajara100% (1)
- 1 Lista de ExercíciosDocumento2 páginas1 Lista de ExercíciossamaraAinda não há avaliações
- ABNT NBR IEC 62353 - Equipamento Elétromédico - Ensaio Recorrente e Após ReparoDocumento72 páginasABNT NBR IEC 62353 - Equipamento Elétromédico - Ensaio Recorrente e Após ReparoEng. Edelson MartinsAinda não há avaliações
- 006 - Fis - Solda MigDocumento2 páginas006 - Fis - Solda MigAlersonAinda não há avaliações
- O Nerd e A Garota Proibida 2 - Jariane RibeiroDocumento246 páginasO Nerd e A Garota Proibida 2 - Jariane Ribeiroedna82348Ainda não há avaliações
- Luz Ultravioleta Revela Cores Originais de Estátuas Gregas - Bem Diferente Do Que Imaginávamos - Hypeness - Inovação e Criatividade para TodosDocumento20 páginasLuz Ultravioleta Revela Cores Originais de Estátuas Gregas - Bem Diferente Do Que Imaginávamos - Hypeness - Inovação e Criatividade para TodosHera BrigagaoAinda não há avaliações