Você também pode gostar
- Apostila F28027 Volume 1: Handles, Interrupção, PWM e ADCDocumento52 páginasApostila F28027 Volume 1: Handles, Interrupção, PWM e ADCGabriel Lucas100% (1)
- Projetos Com Arm Programado Em C No Cubeide Com Base No Modelo Stm32f103c8 Parte IiiNo EverandProjetos Com Arm Programado Em C No Cubeide Com Base No Modelo Stm32f103c8 Parte IiiAinda não há avaliações
- Otimização de comunicação em microcontroladores utilizando mapeamento em memória externaDocumento56 páginasOtimização de comunicação em microcontroladores utilizando mapeamento em memória externaKAROLINA AMANDA SCHUBERTAinda não há avaliações
- Projeto de Detecção de Cores RGBDocumento10 páginasProjeto de Detecção de Cores RGBMarcelo Ferreira de AraujoAinda não há avaliações
- Sistema de Aquisição de Dados Utilizando o Módulo Esp8266 NodemcuDocumento44 páginasSistema de Aquisição de Dados Utilizando o Módulo Esp8266 NodemcumarceloestimuloAinda não há avaliações
- Medindo A Concentração Em Ppm De Dióxido De CarbonoNo EverandMedindo A Concentração Em Ppm De Dióxido De CarbonoAinda não há avaliações
- Prova de Aptidão Profissional - Nirav Gujjar TM18Documento67 páginasProva de Aptidão Profissional - Nirav Gujjar TM18bernardo100% (1)
- Sistema de Monitoramento de Motores Trifásicos TCCDocumento36 páginasSistema de Monitoramento de Motores Trifásicos TCCSó MerdaAinda não há avaliações
- Conectando O Rtc Modelo Ds3231 Programado No ArduinoNo EverandConectando O Rtc Modelo Ds3231 Programado No ArduinoAinda não há avaliações
- Giga para teste de CI TTLDocumento49 páginasGiga para teste de CI TTLAugusto Ribas HermesAinda não há avaliações
- Hardware Integrado de Baixo Custo Para0aautomação Veicular MinDocumento64 páginasHardware Integrado de Baixo Custo Para0aautomação Veicular MinDrayton Mizael de SouzaAinda não há avaliações
- Projeto DigiChuvaDocumento32 páginasProjeto DigiChuvaguhtavo.fernandesAinda não há avaliações
- Bancada de ManufaturaDocumento40 páginasBancada de ManufaturaThiago A. OliveiraAinda não há avaliações
- Projecto AnualDocumento6 páginasProjecto AnualmilongoalfredoAinda não há avaliações
- Treinamento RevitDocumento11 páginasTreinamento RevitGiovanni BeleganteAinda não há avaliações
- CENTRO ESTADUAL DE EDUCAÇÃO TECNOLÓGICA PAULA SOUZADocumento29 páginasCENTRO ESTADUAL DE EDUCAÇÃO TECNOLÓGICA PAULA SOUZAclaudiosj82Ainda não há avaliações
- Indicador De Bandeira De Taxi Programado No ArduinoNo EverandIndicador De Bandeira De Taxi Programado No ArduinoAinda não há avaliações
- Técnicas Digitais - Contador com Flip-FlopsDocumento3 páginasTécnicas Digitais - Contador com Flip-FlopsWilliamAinda não há avaliações
- Monitoramento de Sensores de SegurançaDocumento87 páginasMonitoramento de Sensores de SegurançaB1SP0 CLANSAinda não há avaliações
- Desenvolvendo Projetos No Energia Para O Msp430 Volume IiNo EverandDesenvolvendo Projetos No Energia Para O Msp430 Volume IiAinda não há avaliações
- Manual Interface Controladora RobóticaDocumento36 páginasManual Interface Controladora RobóticaJoao Rodrigo Almeida100% (1)
- Monografia TCC MecatrônicaDocumento34 páginasMonografia TCC MecatrônicaJay SilveraAinda não há avaliações
- Protótipo Monitoramento Estufas Secagem TabacoDocumento50 páginasProtótipo Monitoramento Estufas Secagem TabacoLeonardo CunhaAinda não há avaliações
- PIC16F628 microcontroladorDocumento84 páginasPIC16F628 microcontroladorhhnogueiraAinda não há avaliações
- Medindo A Concentração Em Ppm De Monóxido De CarbonoNo EverandMedindo A Concentração Em Ppm De Monóxido De CarbonoAinda não há avaliações
- Projeto do robô didático Attabot 2.0Documento59 páginasProjeto do robô didático Attabot 2.0Julia MendesAinda não há avaliações
- Projeto FinalDocumento18 páginasProjeto Finaljorge jorginhoAinda não há avaliações
- Caso 2 - O Segredo de Sucesso Da ZaraDocumento3 páginasCaso 2 - O Segredo de Sucesso Da ZaraCarlos CoelhoAinda não há avaliações
- As Núpcias Celestes: A Integração das VirtudesDocumento221 páginasAs Núpcias Celestes: A Integração das Virtudesofanimenoch100% (2)
- ApostilaDocumento29 páginasApostilaMeme InvestidorAinda não há avaliações
- Be3-15 Medalha SV Mil PDFDocumento57 páginasBe3-15 Medalha SV Mil PDFGabrielaAlvesAinda não há avaliações
- Projeto de estradas: etapas de reconhecimento e exploraçãoDocumento6 páginasProjeto de estradas: etapas de reconhecimento e exploraçãoSandro Figueira100% (1)
- Projetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte LiNo EverandProjetos Com Arm Programado Em Arduino Com Base No Modelo Stm32f103c8 Parte LiAinda não há avaliações
- Implementação das Trilhas de AprofundamentoDocumento11 páginasImplementação das Trilhas de AprofundamentoMauricio CamposAinda não há avaliações
- Obtendo O Sentido, Velocidade E Posição Encoder Absoluto Com Base No ArduinoNo EverandObtendo O Sentido, Velocidade E Posição Encoder Absoluto Com Base No ArduinoAinda não há avaliações
- Av Modelagem de SistemasDocumento4 páginasAv Modelagem de SistemasWagner WittAinda não há avaliações
- Implementando Um Amperímetro Ac Trifásico Não Invasivo Com Base No Pic18f1220 E Xc8No EverandImplementando Um Amperímetro Ac Trifásico Não Invasivo Com Base No Pic18f1220 E Xc8Ainda não há avaliações
- (Qi) Tempo de Tela Entre Crianças em Idade Escolar de 6 A 14 Anos Uma Revisão SistemáticaDocumento19 páginas(Qi) Tempo de Tela Entre Crianças em Idade Escolar de 6 A 14 Anos Uma Revisão SistemáticaVili Andrade FotografiaAinda não há avaliações
- Cálculos farmacêuticos e conversão de unidadesDocumento2 páginasCálculos farmacêuticos e conversão de unidadesVirlaine Crislla0% (1)
- Enfeite de Porta de Maternidade CoelhosDocumento12 páginasEnfeite de Porta de Maternidade CoelhosCarlos MassaroAinda não há avaliações
- Perguntas de Exame 1 1Documento18 páginasPerguntas de Exame 1 1BrunoCoelhoAinda não há avaliações
- Aula 02 Slides Os MensageirosDocumento30 páginasAula 02 Slides Os MensageirosCENPAC Centro Espírita Nympho de Paula CorreaAinda não há avaliações
- Periferia Urbana e Expansão Urbana PDFDocumento70 páginasPeriferia Urbana e Expansão Urbana PDFcarlos de JesusAinda não há avaliações
- Desenvolvendo Um Supervisório Em Vb Com Gauge Angular Para Monitoramento De Co2 Programado No ArduinoNo EverandDesenvolvendo Um Supervisório Em Vb Com Gauge Angular Para Monitoramento De Co2 Programado No ArduinoAinda não há avaliações
- Folha Dízima 8º AnoDocumento1 páginaFolha Dízima 8º AnoFrancisco UlissesAinda não há avaliações
- Desenvolvendo Um Supervisório Em Vc# Com Gráfico Scope Para Monitoramento De Co2 Programado No ArduinoNo EverandDesenvolvendo Um Supervisório Em Vc# Com Gráfico Scope Para Monitoramento De Co2 Programado No ArduinoAinda não há avaliações
- As neuropsicoses de defesa: histeria, obsessão e fobiaDocumento10 páginasAs neuropsicoses de defesa: histeria, obsessão e fobiakarla100% (1)
- Desenvolvendo Um Voltímetro Trifásico Com Base No Pic18f4520 E C18No EverandDesenvolvendo Um Voltímetro Trifásico Com Base No Pic18f4520 E C18Ainda não há avaliações
- Questionário LP detecta defeitosDocumento5 páginasQuestionário LP detecta defeitosRaquel Pereira80% (5)
- Educação de Qualidade Um Desafio para MoçambiqueDocumento9 páginasEducação de Qualidade Um Desafio para MoçambiqueIgor JuriarAinda não há avaliações
- Monitorando Através Do Visual C# O Co2 Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual C# O Co2 Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Livro - Interação GenicaDocumento8 páginasLivro - Interação GenicaVictoria CostaAinda não há avaliações
- Pombo-Gira e o resgate do sagrado femininoDocumento34 páginasPombo-Gira e o resgate do sagrado femininomoria008Ainda não há avaliações
- Titulação fotométrica de mistura de p-nitrofenol e m-nitrofenolDocumento39 páginasTitulação fotométrica de mistura de p-nitrofenol e m-nitrofenoljorge henriqueAinda não há avaliações
- 2022.11.16 Ebook DeficitHabitacional MDR FJPDocumento478 páginas2022.11.16 Ebook DeficitHabitacional MDR FJPGiovanna AvelarAinda não há avaliações
- Arte 3série Slide Aula 15Documento23 páginasArte 3série Slide Aula 15Regilene CutrimAinda não há avaliações
- ABES - Programa Lixo Nosso de Cada DiaDocumento32 páginasABES - Programa Lixo Nosso de Cada DiaPaulo SchwirkowskiAinda não há avaliações
- Imóveis em Santo Antônio das MissõesDocumento8 páginasImóveis em Santo Antônio das MissõesVanessa AlvesAinda não há avaliações
- Autorização e Conferencia e Aprovação de Projetos QD 18 LT 33 CapriDocumento5 páginasAutorização e Conferencia e Aprovação de Projetos QD 18 LT 33 Caprifrancielly.agfAinda não há avaliações
- Desafios lógicos com palitos de fósforoDocumento29 páginasDesafios lógicos com palitos de fósforokekewolf100% (2)
- Avaliação de Matemática do 2o bimestreDocumento18 páginasAvaliação de Matemática do 2o bimestreDayana AlkmimAinda não há avaliações
- Lista DerivadaDocumento9 páginasLista DerivadaponeisinhoAinda não há avaliações
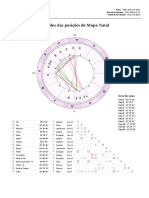
- Mapa Astral Digitalizado - Walter SallesDocumento1 páginaMapa Astral Digitalizado - Walter SalleswaltersallesAinda não há avaliações
- Cetamina em PsiquiatriaDocumento20 páginasCetamina em PsiquiatriaMilton Mendonça Junior100% (1)
- Biomecânica Básica dos Exercícios: Membros InferioresNo EverandBiomecânica Básica dos Exercícios: Membros InferioresNota: 3.5 de 5 estrelas3.5/5 (8)