Você também pode gostar
- Sistemas Lineares FinalDocumento12 páginasSistemas Lineares FinalJersoAinda não há avaliações
- Aula4 - Sistemas LinearesDocumento17 páginasAula4 - Sistemas LinearesestoicaaescolaAinda não há avaliações
- Eliminação GaussianaDocumento46 páginasEliminação Gaussianaddado100% (1)
- Sistemas linearesDocumento7 páginasSistemas lineares10thiagosilvaAinda não há avaliações
- Resolvendo e discutindo sistemas linearesDocumento38 páginasResolvendo e discutindo sistemas linearesEduardo FerreiraAinda não há avaliações
- 02 - Sistemas LinearesDocumento16 páginas02 - Sistemas LinearesMarcelo MottaAinda não há avaliações
- Sistemas lineares: conceitos e resoluçãoDocumento25 páginasSistemas lineares: conceitos e resoluçãoSCDAinda não há avaliações
- Sistemas linearesDocumento4 páginasSistemas linearesMagnoAinda não há avaliações
- Sistemas de equações linearesDocumento7 páginasSistemas de equações linearesSamuel SilvaAinda não há avaliações
- Matrizes e Sistemas LinearesDocumento20 páginasMatrizes e Sistemas LinearesYin Hong TuAinda não há avaliações
- Sistemas lineares e equações matemáticasDocumento104 páginasSistemas lineares e equações matemáticasDeivy Douglas Schuman Ribeiro100% (1)
- (Mat) FT3 - Números Reais 3 - SistemasDocumento8 páginas(Mat) FT3 - Números Reais 3 - SistemasManel MatosAinda não há avaliações
- Aula6 - Sistemas LinearesDocumento12 páginasAula6 - Sistemas LinearesElder GuedesAinda não há avaliações
- AlgebraDocumento94 páginasAlgebramaria joao sargentoAinda não há avaliações
- Resolução de equações e sistemas de equaçõesDocumento17 páginasResolução de equações e sistemas de equaçõesAna Sofia LopesAinda não há avaliações
- Aula 3 Sistemas Lineares 2021 ADocumento41 páginasAula 3 Sistemas Lineares 2021 ALuísAinda não há avaliações
- Sistemas de Equacoes Lineares2013Documento9 páginasSistemas de Equacoes Lineares2013SCDAinda não há avaliações
- Apostila de Sistemas Lineares 2015Documento17 páginasApostila de Sistemas Lineares 2015Curta PolloAinda não há avaliações
- Aula de Sistemas de EquaçõesDocumento13 páginasAula de Sistemas de EquaçõesRobson CavalcanteAinda não há avaliações
- Resolução de sistemas de equações linearesDocumento19 páginasResolução de sistemas de equações linearesGonçalo LimaAinda não há avaliações
- UD IV - Sistemas LinearesDocumento24 páginasUD IV - Sistemas LinearesCarlos StelleAinda não há avaliações
- Resolução de sistemas de equações linearesDocumento9 páginasResolução de sistemas de equações linearesÂngela MartinsAinda não há avaliações
- Sistemas 2x2Documento13 páginasSistemas 2x2Robson CavalcanteAinda não há avaliações
- Aula 3 - MatemáticaDocumento17 páginasAula 3 - MatemáticafofocandocriandoAinda não há avaliações
- 2.SlidesSistemas FMDocumento64 páginas2.SlidesSistemas FMLuis AraujoAinda não há avaliações
- Sistemas lineares: formas e resoluçãoDocumento14 páginasSistemas lineares: formas e resoluçãoMarlon Demetrio RodriguesAinda não há avaliações
- Sistemas Lineares Aula 03Documento29 páginasSistemas Lineares Aula 03Emilly DaianyAinda não há avaliações
- Solução numérica de sistemas de equações algébricas linearesDocumento23 páginasSolução numérica de sistemas de equações algébricas linearessidAinda não há avaliações
- Analise Sis Lineares 1Documento55 páginasAnalise Sis Lineares 1vgustavo_1Ainda não há avaliações
- Matrizes e Sistemas LinearesDocumento14 páginasMatrizes e Sistemas LinearesRicardo MarlusAinda não há avaliações
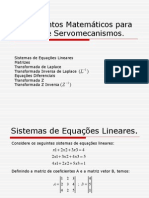
- Fundamentos Matematicos para Controle e ServomecanismosDocumento22 páginasFundamentos Matematicos para Controle e ServomecanismosJuan_Kennedy_A_1533Ainda não há avaliações
- Sistemas lineares: introdução e classificaçãoDocumento59 páginasSistemas lineares: introdução e classificaçãoRaul GabrielAinda não há avaliações
- Álgebra Linear: Conceitos FundamentaisDocumento146 páginasÁlgebra Linear: Conceitos FundamentaistecnicoengenAinda não há avaliações
- Lista de exercícios de matemática aplicada com resolução de EDOsDocumento9 páginasLista de exercícios de matemática aplicada com resolução de EDOsNathani ZampirolliAinda não há avaliações
- Sistemas lineares: resolução e propriedadesDocumento7 páginasSistemas lineares: resolução e propriedadesgabrielAinda não há avaliações
- TeoremaRF e SistLinDocumento9 páginasTeoremaRF e SistLinGabriel Mendes MedeirosAinda não há avaliações
- 01 - Sistemas LinearesDocumento23 páginas01 - Sistemas Linearesmatheus guimaraesAinda não há avaliações
- Equações lineares e sistemasDocumento2 páginasEquações lineares e sistemasRomeu CastroAinda não há avaliações
- Instituto Superior T Ecnico Departamento de Matem Atica: 11 1 12 2 1n N 1 21 1 22 2 2n N 2Documento150 páginasInstituto Superior T Ecnico Departamento de Matem Atica: 11 1 12 2 1n N 1 21 1 22 2 2n N 2Margarida OliveiraAinda não há avaliações
- Sistemas lineares e método de GaussDocumento151 páginasSistemas lineares e método de GaussMargarida OliveiraAinda não há avaliações
- Lista de Exercícios Sistemas LinearesDocumento3 páginasLista de Exercícios Sistemas LinearesstevemeloAinda não há avaliações
- Aula Solução de Sistemas Lineares pt1Documento79 páginasAula Solução de Sistemas Lineares pt1Chrystian WallanceAinda não há avaliações
- (CALCULO NUMERICO) Sistemas Lineares e Métodos DiretosDocumento20 páginas(CALCULO NUMERICO) Sistemas Lineares e Métodos DiretosEnzo BocalonAinda não há avaliações
- Sistemas LinearesDocumento40 páginasSistemas LinearesFranckSiilvaAinda não há avaliações
- Lista de exercícios de álgebra linear para economiaDocumento35 páginasLista de exercícios de álgebra linear para economiaThalita FreitasAinda não há avaliações
- Sistemas LinearesDocumento10 páginasSistemas LinearesLilian AnselmoAinda não há avaliações
- Sistemas de equações lineares e matrizesDocumento13 páginasSistemas de equações lineares e matrizesMarta NascimentoAinda não há avaliações
- Sistemas 2x2 ExercíciosDocumento13 páginasSistemas 2x2 ExercíciosMíriam VerasAinda não há avaliações
- Notas de Algebra LinearDocumento173 páginasNotas de Algebra LinearElder SantosAinda não há avaliações
- Sistemas de equações linearesDocumento116 páginasSistemas de equações linearesGabriel A. AlbuquerqueAinda não há avaliações
- 03 Sistemas LinearesDocumento190 páginas03 Sistemas LinearesLETICIA DAS GRACAS ANTONIO SILVAAinda não há avaliações
- 5-CN Material 03 SistemaslinearesDocumento27 páginas5-CN Material 03 SistemaslinearesRodolfo Oliveira de SouzaAinda não há avaliações
- Unidade3 - Resolucao de Sistemas LinearesDocumento35 páginasUnidade3 - Resolucao de Sistemas LinearesJesué Lucas DiogoAinda não há avaliações
- Sistemas lineares e equaçõesDocumento25 páginasSistemas lineares e equaçõesjoão_camilo_11Ainda não há avaliações
- Recursos de Aprendizagem Sobre Algebra Matricial (SISTEMAS LINEARES E DETERMINANTES)Documento21 páginasRecursos de Aprendizagem Sobre Algebra Matricial (SISTEMAS LINEARES E DETERMINANTES)Orlando Penicela JúniorAinda não há avaliações
- Aula 2 Determinantes Sistemas 2021 1Documento25 páginasAula 2 Determinantes Sistemas 2021 1LuísAinda não há avaliações
- Resumos Das Aulas de Álgebra Linear Cursos: LEC21, LEGM 1 Semestre de 2021-2022Documento5 páginasResumos Das Aulas de Álgebra Linear Cursos: LEC21, LEGM 1 Semestre de 2021-2022Salvador MeloAinda não há avaliações
- Sistemas lineares homogêneos e matrizes elementaresDocumento6 páginasSistemas lineares homogêneos e matrizes elementaresΓουλιέλμος ΠαραδεδαAinda não há avaliações
- Resolução numérica de sistemas lineares por método de GaussDocumento80 páginasResolução numérica de sistemas lineares por método de GaussHelder Anibal HerminiAinda não há avaliações
- Apresentação - Matemática para Engenharia I - 2016 - 2Documento11 páginasApresentação - Matemática para Engenharia I - 2016 - 2Monica MartinezAinda não há avaliações
- AL - 3 - Autovalores e Autovetores - 2016 - 2Documento15 páginasAL - 3 - Autovalores e Autovetores - 2016 - 2Monica MartinezAinda não há avaliações
- AL - 2 - Espaços Vetoriais - 2016 - 2Documento48 páginasAL - 2 - Espaços Vetoriais - 2016 - 2Monica MartinezAinda não há avaliações
- Paginacao DiferenciadaDocumento2 páginasPaginacao DiferenciadaBrendda MichelleAinda não há avaliações
- PPP - 2014 - Santiago - Arquitetura e Urbanismo - BachareladoDocumento330 páginasPPP - 2014 - Santiago - Arquitetura e Urbanismo - BachareladoMonica MartinezAinda não há avaliações
- Arquitetura Moderna em Porto Alegre Na Década de 1950Documento19 páginasArquitetura Moderna em Porto Alegre Na Década de 1950Nelson WainsteinAinda não há avaliações
- Trabalho Conclusao de CursoDocumento57 páginasTrabalho Conclusao de CursoMonica MartinezAinda não há avaliações
- Uso de tecnologia na educaçãoDocumento7 páginasUso de tecnologia na educaçãoJúlia Braga dos SantosAinda não há avaliações
- Grub - Tudo Sobre O Gerenciador de Boot Do LinuxDocumento4 páginasGrub - Tudo Sobre O Gerenciador de Boot Do LinuxPaulo KallerAinda não há avaliações
- Manual de Instruções Mitsubishi L200 Triton (2015) (Português - 258 Páginas)Documento1 páginaManual de Instruções Mitsubishi L200 Triton (2015) (Português - 258 Páginas)RAPHAEL VICTOR PEREIRA VICENTINIAinda não há avaliações
- Projecto de Intervencao em Apredizagem MistaDocumento19 páginasProjecto de Intervencao em Apredizagem MistaDinis Miguel MatsinheAinda não há avaliações
- Boletim 2020-135903 PDFDocumento2 páginasBoletim 2020-135903 PDFFabio AugustoAinda não há avaliações
- JamersonFernandoConfortMartins DISSERTDocumento102 páginasJamersonFernandoConfortMartins DISSERTJoão Lucas Lima GadelhaAinda não há avaliações
- Fogão A Gás 76EBR, 76EXR Manual de InstruçõesDocumento24 páginasFogão A Gás 76EBR, 76EXR Manual de InstruçõesAntoniazziAinda não há avaliações
- Catalogo PARAFUSOSDocumento18 páginasCatalogo PARAFUSOSVenicio AchermanAinda não há avaliações
- Relações entre palavras: homógrafas, homófonas, homónimas e parónimasDocumento1 páginaRelações entre palavras: homógrafas, homófonas, homónimas e parónimasSusana NunesAinda não há avaliações
- Manual CTSI - Caminhão Transbordo Santa IzabelDocumento16 páginasManual CTSI - Caminhão Transbordo Santa IzabelZeka Borgato0% (1)
- Catalogo Flash Tecnologia 01-11-22Documento69 páginasCatalogo Flash Tecnologia 01-11-22WMS CURSOSAinda não há avaliações
- Historico PDFDocumento1 páginaHistorico PDFRoberto Euzebio CecilioAinda não há avaliações
- 7 Passos para A Construcao de Uma Marca Pessoal MilionariaDocumento32 páginas7 Passos para A Construcao de Uma Marca Pessoal Milionariateresa palmaAinda não há avaliações
- Treinamento PfsenseDocumento31 páginasTreinamento Pfsenseamsalles2011Ainda não há avaliações
- MOC Ficha InformativaDocumento3 páginasMOC Ficha Informativaricardosm08Ainda não há avaliações
- Ricardo Valeriano - Cap. 4Documento21 páginasRicardo Valeriano - Cap. 4Helio RodriguesAinda não há avaliações
- Como Efetuar Login No Siproquim2Documento5 páginasComo Efetuar Login No Siproquim2mrcatsousaAinda não há avaliações
- Tha-16 Ip55Documento1 páginaTha-16 Ip55alaninspmec2Ainda não há avaliações
- Manual Balança Analítica OHAUS PR SeriesDocumento44 páginasManual Balança Analítica OHAUS PR SeriesCarolina ImaiAinda não há avaliações
- O Limiar Da Liberdade de Expressão No Ensejo Contemporâneo Do Direito BrasileiroDocumento21 páginasO Limiar Da Liberdade de Expressão No Ensejo Contemporâneo Do Direito BrasileiroIgor GomesAinda não há avaliações
- Simulado 01 de MatemáticaDocumento2 páginasSimulado 01 de MatemáticaLais GermanoAinda não há avaliações
- Linha Completa Boch Motores CD 12 VDocumento63 páginasLinha Completa Boch Motores CD 12 Vvilmar vieiraAinda não há avaliações
- AlgoritimosDocumento8 páginasAlgoritimosMarcelo FreitasAinda não há avaliações
- Usina Caldeira Check ListDocumento2 páginasUsina Caldeira Check ListPedro HenriqueAinda não há avaliações
- Concursos Públicos em Biblioteconomia - Questões PDFDocumento40 páginasConcursos Públicos em Biblioteconomia - Questões PDFRaíssa Michalsky MartinsAinda não há avaliações
- Kart Eletrico PDFDocumento116 páginasKart Eletrico PDFLeo TronicoAinda não há avaliações
- Aula 11 - Sie - SubestaçõesDocumento31 páginasAula 11 - Sie - SubestaçõesMarcos AurelioAinda não há avaliações
- Ebook Business IntelligenceDocumento8 páginasEbook Business IntelligenceAyslanAlvesAinda não há avaliações
- Edital de Abertura de Processo Seletivo para Contratacao de Analista PlenoEspecialista 172023Documento12 páginasEdital de Abertura de Processo Seletivo para Contratacao de Analista PlenoEspecialista 172023inaldo_ribeiroAinda não há avaliações
- 3-Cabine e Plataforma Do OperadorDocumento20 páginas3-Cabine e Plataforma Do OperadorLeandro AraújoAinda não há avaliações
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Eletricista De ManutençãoNo EverandEletricista De ManutençãoAinda não há avaliações
- DNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.No EverandDNA da Cocriação: Descubra o método revolucionário para dar um salto duplo quântico ao futuro, sintonizando uma nova versão de você. Aumente sua frequência vibracional para cocriar instantaneamente sua realidade e alterar o roteiro do seu destino.Nota: 5 de 5 estrelas5/5 (1)
- Indicadores Matemáticos Para Apostas Em FutebolNo EverandIndicadores Matemáticos Para Apostas Em FutebolAinda não há avaliações