Você também pode gostar
- Esquema elétrico de circuito de controle de cargaDocumento6 páginasEsquema elétrico de circuito de controle de cargaJERONIMO JARRINAinda não há avaliações
- Schematic_Z80 Trainer_2023-04-10 (3)Documento6 páginasSchematic_Z80 Trainer_2023-04-10 (3)Alfredo Meurer JuniorAinda não há avaliações
- PHD Padrão 220V PDFDocumento6 páginasPHD Padrão 220V PDFLaboratorio EletronicaAinda não há avaliações
- Schematic Fast Line Follower 2023-06-11Documento1 páginaSchematic Fast Line Follower 2023-06-11alejo.mancipe777Ainda não há avaliações
- Esquema Eletrico ZelloGateway V1.1Documento1 páginaEsquema Eletrico ZelloGateway V1.1Eugênio MagalhãesAinda não há avaliações
- Inversor de FrequenciaDocumento1 páginaInversor de FrequenciaThiago Sena SalesAinda não há avaliações
- Diagrama de circuito elétrico de serra e coolerDocumento1 páginaDiagrama de circuito elétrico de serra e coolerGabriel SilvaAinda não há avaliações
- Control InductionDocumento1 páginaControl Inductiondogsmat555Ainda não há avaliações
- Transmissor FM EsqDocumento1 páginaTransmissor FM Esqgustavo da silvaAinda não há avaliações
- Fuente de alimentación de 12V DC para ArduinoDocumento1 páginaFuente de alimentación de 12V DC para ArduinoJohan MorenoAinda não há avaliações
- Esquema elétrico de lavanderia industrialDocumento1 páginaEsquema elétrico de lavanderia industrialMatheus VictorAinda não há avaliações
- ARDUINO_RADIO_INTERFACEDocumento1 páginaARDUINO_RADIO_INTERFACEKovalski AndersonAinda não há avaliações
- Al ChillerDocumento1 páginaAl Chilleranunciochato0Ainda não há avaliações
- Schematic - Luces Audio Rítmicas 12V - 2022!02!23Documento1 páginaSchematic - Luces Audio Rítmicas 12V - 2022!02!23Mike DiegoAinda não há avaliações
- Quiz#07 - 01 - Relay Circuit - To PLCDocumento1 páginaQuiz#07 - 01 - Relay Circuit - To PLC22146015Ainda não há avaliações
- Schematic - Receptor Regenerativo 2 Fets - 2022!11!07Documento1 páginaSchematic - Receptor Regenerativo 2 Fets - 2022!11!07Doni SouzaAinda não há avaliações
- ACS800-75KW-DB2Documento1 páginaACS800-75KW-DB2Huynh Tien ThinhAinda não há avaliações
- 19 10 24 Partida Aceleração Rotórica Botoeira Unica 24vDocumento1 página19 10 24 Partida Aceleração Rotórica Botoeira Unica 24vMelanie SanchezAinda não há avaliações
- Circuito de teste de diodo zenerDocumento6 páginasCircuito de teste de diodo zenerEulerMartinsDeMelloAinda não há avaliações
- Circuito trifásico com proteção térmica e magnéticaDocumento1 páginaCircuito trifásico com proteção térmica e magnéticaRafael Pereira Goncalves100% (1)
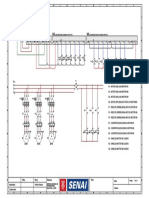
- Partida Sequencial de 4 Motores Trifásicos Por CLP em 24VDocumento1 páginaPartida Sequencial de 4 Motores Trifásicos Por CLP em 24VedicmlimaAinda não há avaliações
- Schematic PCB Relay Front Panel 2023-06-14Documento1 páginaSchematic PCB Relay Front Panel 2023-06-14fabianAinda não há avaliações
- Partida YD CLPDocumento1 páginaPartida YD CLPIgor BarbosaAinda não há avaliações
- 22-Mesin Rumput RemoteDocumento1 página22-Mesin Rumput RemotezulAinda não há avaliações
- Alarme de BobinaDocumento1 páginaAlarme de BobinaMax LimaAinda não há avaliações
- Diagrama de blocos de uma aula eletromecânicaDocumento1 páginaDiagrama de blocos de uma aula eletromecânicaPABLO DA ROCHA FREITAS SILVAAinda não há avaliações
- 1º Prática PDFDocumento1 página1º Prática PDFRamon da Cruz MartinsAinda não há avaliações
- Schematic Monster Mottor Shield 2022-07-31Documento1 páginaSchematic Monster Mottor Shield 2022-07-31Степан ЮларжиAinda não há avaliações
- MANUAL MAKER - Braço Robótico Controlado Por PotenciômetrosDocumento1 páginaMANUAL MAKER - Braço Robótico Controlado Por PotenciômetrosEdnaldo Alexandre ZandonaAinda não há avaliações
- lt15 Power BoardDocumento1 páginalt15 Power BoardJonathan MedeirosAinda não há avaliações
- Quadro Principal - El-Pc-Abnt Cat.3Documento6 páginasQuadro Principal - El-Pc-Abnt Cat.3Marcone SoaresAinda não há avaliações
- Bombas Caixas Do Poço Rev2Documento1 páginaBombas Caixas Do Poço Rev2Stênio BarrosAinda não há avaliações
- VT02 Application Note - ENG - 1Documento10 páginasVT02 Application Note - ENG - 1Rafael GarciaAinda não há avaliações
- Esquema Eletrico - 01Documento1 páginaEsquema Eletrico - 01Sarah SousaAinda não há avaliações
- Diagrama de potência e comando de quadro elétrico industrialDocumento1 páginaDiagrama de potência e comando de quadro elétrico industrialSalvador de Matos R. NetoAinda não há avaliações
- 18 - 06 - 03 CAD Reversão Dahlander CLPDocumento1 página18 - 06 - 03 CAD Reversão Dahlander CLPErasmo SilvaAinda não há avaliações
- Estrela Triangulo Manual Automatica Chave Boia Inferior e SuperiorDocumento1 páginaEstrela Triangulo Manual Automatica Chave Boia Inferior e SuperiorandreAinda não há avaliações
- Esquema elétrico de circuito de refrigeraçãoDocumento5 páginasEsquema elétrico de circuito de refrigeraçãoMarcosAinda não há avaliações
- automaticHandDryerDocumento1 páginaautomaticHandDryersk21meb0b55Ainda não há avaliações
- Acionamento automático de motor trifásicoDocumento1 páginaAcionamento automático de motor trifásicofabio100% (1)
- Schematic v3Documento1 páginaSchematic v3lasse.stiefelAinda não há avaliações
- CDP1802 Microprocessor Kit 2018Documento3 páginasCDP1802 Microprocessor Kit 2018ekrem kayaAinda não há avaliações
- Circuitry Vaula94Documento1 páginaCircuitry Vaula94Emerson M. SeffrinAinda não há avaliações
- Chave Pivo 25cv 220Documento1 páginaChave Pivo 25cv 220cap1xabaAinda não há avaliações
- Video Transmitter DiagDocumento1 páginaVideo Transmitter Diagfrankrodrigues8303Ainda não há avaliações
- Esquema DetectorMetaisDocumento1 páginaEsquema DetectorMetaismarlonAinda não há avaliações
- Sx1276mb1las E311v02aDocumento1 páginaSx1276mb1las E311v02acleiserpirapora2422Ainda não há avaliações
- Partida Direta 02 TeamsDocumento1 páginaPartida Direta 02 TeamssoulucastopAinda não há avaliações
- Visio Monodoses2Documento3 páginasVisio Monodoses2matos.jps1977Ainda não há avaliações
- Circuitos - Estrela Triângulo - TIEDocumento1 páginaCircuitos - Estrela Triângulo - TIEmbs1971Ainda não há avaliações
- Quadro de Comando Bomba de IncêndioDocumento1 páginaQuadro de Comando Bomba de IncêndioSadoc SouzaAinda não há avaliações
- 1º Prática Com Botão de EMER PDFDocumento1 página1º Prática Com Botão de EMER PDFRamon da Cruz MartinsAinda não há avaliações
- Alex Martins Araujo Borges Junior - ESTRELA TRIANGULO SENAI OKDocumento1 páginaAlex Martins Araujo Borges Junior - ESTRELA TRIANGULO SENAI OKeverthon.santosAinda não há avaliações
- Diagrama de comando e força de um sistema de automação industrialDocumento1 páginaDiagrama de comando e força de um sistema de automação industrialCARLOS BARBOSAAinda não há avaliações
- Análise de circuito elétrico com motoresDocumento1 páginaAnálise de circuito elétrico com motoresGabriel AlvesAinda não há avaliações
- v3 SCHDocumento3 páginasv3 SCHTausique SheikhAinda não há avaliações
- Esquema elétrico de um sistema de controle de motoresDocumento1 páginaEsquema elétrico de um sistema de controle de motoresLuiz Carlos AguilellaAinda não há avaliações
- PLL 2 MDocumento1 páginaPLL 2 MOscar SeminiAinda não há avaliações
- Arranque Direto Com InversãoDocumento1 páginaArranque Direto Com InversãoCarlos FreitasAinda não há avaliações
- Projetos De Eletrônica Industrial Usando O ArduinoNo EverandProjetos De Eletrônica Industrial Usando O ArduinoAinda não há avaliações
- Regras do jogo Lamberta: troca de marcas X e O num tabuleiro linearDocumento1 páginaRegras do jogo Lamberta: troca de marcas X e O num tabuleiro linearManuel MicasAinda não há avaliações
- RPG HXH InconpletoDocumento3 páginasRPG HXH Inconpletosamuka correaAinda não há avaliações
- Atividades de matemática com coordenadasDocumento4 páginasAtividades de matemática com coordenadasjullecostaAinda não há avaliações
- Exercícios Equações Do 1° GrauDocumento2 páginasExercícios Equações Do 1° GrauRaquel Vieira LopesAinda não há avaliações
- Planejamento Estrategia de SubstituiçãoDocumento2 páginasPlanejamento Estrategia de SubstituiçãoGrasielle Pardinho Rodrigues de AguiarAinda não há avaliações
- Erros típicos no cálculo de variantesDocumento6 páginasErros típicos no cálculo de variantesDiego Homrich MoritzAinda não há avaliações
- Consulta - 2 Prova de Construções de AçoDocumento3 páginasConsulta - 2 Prova de Construções de AçoLívia AndradeAinda não há avaliações
- Ferramentas para Identificar AHSD 3Documento1 páginaFerramentas para Identificar AHSD 3Altas HabilidadesAinda não há avaliações
- 3 - Encontro Consonantal BRDocumento25 páginas3 - Encontro Consonantal BRLaura BorgesAinda não há avaliações
- Feudalism oDocumento8 páginasFeudalism oFernanda Alves CoelhoAinda não há avaliações
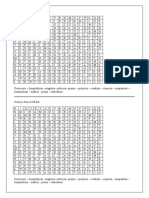
- Caça-Palavras ZDocumento1 páginaCaça-Palavras ZmsolivereisAinda não há avaliações
- Os Telhados de Ludo Os Telhados de Ludovia Regr 2923Documento36 páginasOs Telhados de Ludo Os Telhados de Ludovia Regr 2923VictorMatheusGomesAinda não há avaliações
- Gabaritos Ginecologia e Obstetrícia com questões anuladasDocumento2 páginasGabaritos Ginecologia e Obstetrícia com questões anuladasjbninrioAinda não há avaliações
- PRPWM (10) - 96V 01 10 13Documento1 páginaPRPWM (10) - 96V 01 10 13Eli dos Anjos Rodrigues100% (1)
- Poliminós: uma proposta de utilização no ensino da matemáticaDocumento22 páginasPoliminós: uma proposta de utilização no ensino da matemáticaIuri CostaAinda não há avaliações
- Avaliacao de Integridade Da AplicadoraDocumento5 páginasAvaliacao de Integridade Da AplicadoraAnna CatarinaAinda não há avaliações
- ARTE 3º ANO - Imprimir Caça PalavrasDocumento2 páginasARTE 3º ANO - Imprimir Caça PalavrasCOORDENAÇÃO CMERAinda não há avaliações
- Jogos Enxadristicos-1Documento6 páginasJogos Enxadristicos-1Maximiliano ZaniratoAinda não há avaliações
- Xadrez Básico - Dr. Orfeu Gilberto D Agostini - ÍNDICE EXPLICATIVODocumento8 páginasXadrez Básico - Dr. Orfeu Gilberto D Agostini - ÍNDICE EXPLICATIVOLucasNasynAinda não há avaliações
- Ficha Monstro EditavelDocumento1 páginaFicha Monstro EditavelMatheus felizardo50% (2)
- Lista Beira Mar AÇÃO 04.11Documento3 páginasLista Beira Mar AÇÃO 04.11Diácono Alexandre Maia MartosAinda não há avaliações
- Auto-diagnóstico estilos comunicaçãoDocumento6 páginasAuto-diagnóstico estilos comunicaçãoRicardo Jorge Vitali SimoesAinda não há avaliações
- Resultado final curso Eletromecânica UP Bacelar PortelaDocumento1 páginaResultado final curso Eletromecânica UP Bacelar PortelaPedro Thiago CostaAinda não há avaliações
- Sobressalentes CASSETTE TRC Calor TCCD Série BDocumento1 páginaSobressalentes CASSETTE TRC Calor TCCD Série BGabriel EirasAinda não há avaliações
- SNAE2022 - Jogo Da Glória (2º Ciclo)Documento3 páginasSNAE2022 - Jogo Da Glória (2º Ciclo)Stela SilvaAinda não há avaliações
- 50 frases do holandêsDocumento4 páginas50 frases do holandêsIsac SilvaAinda não há avaliações
- Atividades lúdicas para crianças com TDAHDocumento20 páginasAtividades lúdicas para crianças com TDAHAndressa MarquesAinda não há avaliações
- Pateo NazarethDocumento39 páginasPateo NazarethmarciojferrazribeiroAinda não há avaliações
- MAT PLIM2 Ficha 10 Com SolucoesDocumento2 páginasMAT PLIM2 Ficha 10 Com SolucoesSofia Pimentel BatistaAinda não há avaliações
- Currículo Do XadrezDocumento6 páginasCurrículo Do XadrezJoao CálixAinda não há avaliações