Você também pode gostar
- CONTROLE DE VELOCIDADE PWM Cadeira de Roda Final.Documento79 páginasCONTROLE DE VELOCIDADE PWM Cadeira de Roda Final.José Pereira LimaAinda não há avaliações
- Controle de Motor de Passo by NCB PDFDocumento6 páginasControle de Motor de Passo by NCB PDFOziel Ferreira SilvaAinda não há avaliações
- Ponte-H Com Controle PWM (Mec009)Documento5 páginasPonte-H Com Controle PWM (Mec009)Mairos Barbosa Bittencourt ModestoAinda não há avaliações
- Manual 297Documento20 páginasManual 297renanslivaAinda não há avaliações
- Controle de Motor Ac Com DsPICDocumento4 páginasControle de Motor Ac Com DsPICRodolfo Arantes Gonçalves100% (1)
- Tutorial Eletronica - Motor de PassoDocumento16 páginasTutorial Eletronica - Motor de Passofabricio moletta0% (1)
- Driver MOSFET para Motor BrushlessDocumento3 páginasDriver MOSFET para Motor BrushlessdiegoAinda não há avaliações
- Alimentacao Da Injecao Eletronica e Seus Defeitos IIDocumento12 páginasAlimentacao Da Injecao Eletronica e Seus Defeitos IIVINI100% (1)
- Montagens EletrônicasDocumento29 páginasMontagens EletrônicasCid Henrique Carvalho100% (1)
- Turorial Chave de Seta Rele DiodoDocumento8 páginasTurorial Chave de Seta Rele DiodoLeandro BuenoAinda não há avaliações
- Manual CNC PlasmaDocumento10 páginasManual CNC PlasmaLuiz FigueiredoAinda não há avaliações
- Eletrônica I Fet, Jfet, MosfetDocumento8 páginasEletrônica I Fet, Jfet, MosfetEngenharia Elétrica AcdcAinda não há avaliações
- Motores Passo - Electrónica - Esquemas - TV - Áudio - DigitalDocumento4 páginasMotores Passo - Electrónica - Esquemas - TV - Áudio - DigitalVanildo SilvaAinda não há avaliações
- Carregador de Bateria A Partir de Fonte de PCDocumento9 páginasCarregador de Bateria A Partir de Fonte de PCfilipeagtAinda não há avaliações
- Bc548 MosfetDocumento5 páginasBc548 MosfetEderson MafraAinda não há avaliações
- Projeto Ponte HDocumento7 páginasProjeto Ponte HItamar JuniorAinda não há avaliações
- Carregador de Baterias AutomotvasDocumento33 páginasCarregador de Baterias AutomotvaslourivalAinda não há avaliações
- Implementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- DStage ETC v1.3 Manual - Docx.en - PTDocumento14 páginasDStage ETC v1.3 Manual - Docx.en - PTGustavo CichockiAinda não há avaliações
- Treinamento Básico Simovert MasterdriveDocumento8 páginasTreinamento Básico Simovert MasterdriveVladimir Colombiano de Souza100% (2)
- Capitulo 4Documento7 páginasCapitulo 4Jose NarciAinda não há avaliações
- Controle de Motor Trifásico Com PIC e Módulo de PotênciaDocumento3 páginasControle de Motor Trifásico Com PIC e Módulo de Potênciaafzagui100% (3)
- Manual SMC-U XYZ V3.00Documento18 páginasManual SMC-U XYZ V3.00Rafael De SouzaAinda não há avaliações
- Aplicação Do Microcontrolador Arduino para Contrução de Automodelos ElétricosDocumento13 páginasAplicação Do Microcontrolador Arduino para Contrução de Automodelos ElétricosLucas GomesAinda não há avaliações
- Etb Mix Dimmer Com TriacDocumento11 páginasEtb Mix Dimmer Com TriacIves HernaniAinda não há avaliações
- DimmerDocumento5 páginasDimmerJucaRabeloAinda não há avaliações
- (Eletrônica Org) Fonte de Alimentação ATX - Uma Visão GeralDocumento12 páginas(Eletrônica Org) Fonte de Alimentação ATX - Uma Visão GeralNarendra SadhanaAinda não há avaliações
- Atividade Final - Fundamentos Da Automação IndustrialDocumento7 páginasAtividade Final - Fundamentos Da Automação IndustrialEduardo Monteiro100% (1)
- Metodologia ComponentesDocumento20 páginasMetodologia ComponentesSld YairtAinda não há avaliações
- Fonte de Alimentação ATX - Uma Visão Geral - EletronicaDocumento10 páginasFonte de Alimentação ATX - Uma Visão Geral - EletronicaRubens ReisAinda não há avaliações
- Curso On-Line C - C++ - Porta ParalelaDocumento8 páginasCurso On-Line C - C++ - Porta ParalelaAdrianno SorayaAinda não há avaliações
- Cnc3ax - CópiaDocumento11 páginasCnc3ax - CópiaAdalberto EvangelistaAinda não há avaliações
- Voltímetro PIC by ArneDocumento7 páginasVoltímetro PIC by Arneandrewinacio1893Ainda não há avaliações
- Manual WEG Srw01 Rele Inteligente 50015550Documento20 páginasManual WEG Srw01 Rele Inteligente 50015550David PalhanoAinda não há avaliações
- Termômetro Tipo Bargraph Com PICDocumento3 páginasTermômetro Tipo Bargraph Com PICmaurilioctbaAinda não há avaliações
- Fusiveis PlaystationDocumento2 páginasFusiveis PlaystationsabaraceifadorAinda não há avaliações
- E-Book Estratégia de Funcionamento Da Ecu Edc7 BoschDocumento24 páginasE-Book Estratégia de Funcionamento Da Ecu Edc7 BoschRicardo Tavares100% (6)
- Partidas Suaves - PSR, PSE e PST PDFDocumento46 páginasPartidas Suaves - PSR, PSE e PST PDFfernandoAinda não há avaliações
- Uu - Manual Do Operador Td25sge3 PDFDocumento29 páginasUu - Manual Do Operador Td25sge3 PDFFernandoPelozio100% (1)
- Conheça o LM3914 (ART087)Documento12 páginasConheça o LM3914 (ART087)valdir_azevedo_11Ainda não há avaliações
- Ponte-H Com Controle PWM (Mec009)Documento5 páginasPonte-H Com Controle PWM (Mec009)nazuragomesAinda não há avaliações
- 250 A 5000 Watts PWM DC AcDocumento10 páginas250 A 5000 Watts PWM DC AcO IluminadoAinda não há avaliações
- GC315 Datasheet PT REV-1.8Documento9 páginasGC315 Datasheet PT REV-1.8Claudio OliveiraAinda não há avaliações
- Amplificadores Operacionais em Robótica - Da Teoria A PráticaDocumento5 páginasAmplificadores Operacionais em Robótica - Da Teoria A PráticaRobson CruzAinda não há avaliações
- Anatomia Fontes de Alimentao Chaveadas PCDocumento12 páginasAnatomia Fontes de Alimentao Chaveadas PCrsvlschiavoAinda não há avaliações
- Vacuômetro EletrônicoDocumento226 páginasVacuômetro EletrônicoRenato Ogeda E SouzaAinda não há avaliações
- Como Fazer Luz Traseira de Carro de LEDDocumento8 páginasComo Fazer Luz Traseira de Carro de LEDLuciano PereiraAinda não há avaliações
- Fontes Digitais: Newton C. BragaDocumento4 páginasFontes Digitais: Newton C. BragaPaulo chagas paulo ratoAinda não há avaliações
- Conheça o LM3914 (ART087)Documento12 páginasConheça o LM3914 (ART087)ElizeuAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViAinda não há avaliações
- Atividade Final - Fundamentos Da Automação Industrial - Lidiney SiqueiraDocumento7 páginasAtividade Final - Fundamentos Da Automação Industrial - Lidiney Siqueiraelizangela100% (2)
- Amplificadores Operacionais III - Circuitos ComparadoresDocumento7 páginasAmplificadores Operacionais III - Circuitos ComparadoresSandra AlvesAinda não há avaliações
- Implementando Um Soft-starter No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Soft-starter No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Eletrônico - Circuito Com LEDs PDFDocumento18 páginasEletrônico - Circuito Com LEDs PDFWanderley SenaAinda não há avaliações
- Manual Projecto Senoidal PuraDocumento8 páginasManual Projecto Senoidal PuraJuancarlos ArrietaAinda não há avaliações
- Implementando Um Inversor De Frequência No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Inversor De Frequência No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Manual Hale Booster Pumpers - PortDocumento70 páginasManual Hale Booster Pumpers - PortGleidiston Zattoni100% (1)
- Manual GX 7 GX 11 PDFDocumento48 páginasManual GX 7 GX 11 PDFcelso86% (7)
- Aula 06 Exercicios - PPTX - REVISADODocumento72 páginasAula 06 Exercicios - PPTX - REVISADOgigiparoAinda não há avaliações
- Módulo 1 - Cap 1 - Bit, Byte, Word e DWordDocumento3 páginasMódulo 1 - Cap 1 - Bit, Byte, Word e DWordFabiola Stefani Requena Carvallo100% (1)
- Apostila Proteção em Sistemas FVDocumento3 páginasApostila Proteção em Sistemas FVfreis_51Ainda não há avaliações
- x86 Arquitetura e Instruções BásicasDocumento26 páginasx86 Arquitetura e Instruções BásicasLincoln DiasAinda não há avaliações
- Diagnóstico CAN X900Documento66 páginasDiagnóstico CAN X900Elton Dos Santos100% (1)
- Apostila SketchupDocumento65 páginasApostila SketchupClaudecir PereiraAinda não há avaliações
- Catalogo 2022Documento6 páginasCatalogo 2022RodrigoAinda não há avaliações
- Exercício Resolvido: ResoluçãoDocumento1 páginaExercício Resolvido: ResoluçãoJoão Carlos Freitas da SilvaAinda não há avaliações
- Ppra - Modelo (Gráfica e Editora) PDFDocumento74 páginasPpra - Modelo (Gráfica e Editora) PDFKATIA SARDINHAAinda não há avaliações
- Ano: Data: Mar: LR Mat ExplicaçõesDocumento1 páginaAno: Data: Mar: LR Mat ExplicaçõesTilde LopesAinda não há avaliações
- 207 - PE-1PBR-00207-Auditoria ComportamentalDocumento8 páginas207 - PE-1PBR-00207-Auditoria ComportamentalAlex BrunoAinda não há avaliações
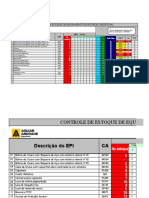
- Estoque de Epi - Junho - 2023Documento4 páginasEstoque de Epi - Junho - 2023Marcos CruzAinda não há avaliações
- Manual Basico Almox SAPDocumento96 páginasManual Basico Almox SAPandlucsAinda não há avaliações
- Arlindo Machado - Arte e MídiaDocumento45 páginasArlindo Machado - Arte e MídiaLara Utzig100% (1)
- I TeoricoDocumento16 páginasI TeoricoGeralda GegefAinda não há avaliações
- Gab Fix7Documento4 páginasGab Fix7Clemente Doart'sAinda não há avaliações
- NBR 5691Documento2 páginasNBR 5691Alex GobbatoAinda não há avaliações
- Cardioversor Responder 2000 - GEDocumento126 páginasCardioversor Responder 2000 - GEBrunoAinda não há avaliações
- 2021 Lenimar AlgLinDocumento263 páginas2021 Lenimar AlgLinEduardo César Cruz MeloAinda não há avaliações
- 1-Orçamento Compressor - PromadamDocumento1 página1-Orçamento Compressor - PromadamLuis SilvaAinda não há avaliações
- Tempestade - Tema 2 - Inteligência ArtificialDocumento8 páginasTempestade - Tema 2 - Inteligência ArtificialClédina FonsecaAinda não há avaliações
- Upgrade11 Prova Equivalência FrequênciaDocumento15 páginasUpgrade11 Prova Equivalência FrequênciaBeatriz NogueiraAinda não há avaliações
- Protocolo de Correspondência Encomendas - Condominio VitoriaDocumento2 páginasProtocolo de Correspondência Encomendas - Condominio VitoriaLeandro AquinoAinda não há avaliações
- Exercício 1.3 - Nota 8,0Documento5 páginasExercício 1.3 - Nota 8,0BR INSTRUÇÕES100% (1)
- Fasciculo Verificacao Duas EtapasDocumento8 páginasFasciculo Verificacao Duas Etapasvitor geruntioAinda não há avaliações
- Ibfc-2019-Mgs-Auxiliar-Administrativo-Prova SEM GABARITO ESTUDAR PELO QCONCURSOSDocumento2 páginasIbfc-2019-Mgs-Auxiliar-Administrativo-Prova SEM GABARITO ESTUDAR PELO QCONCURSOSFelipe LadislauAinda não há avaliações
- 1718 Ex E/S: Manual Do UsuárioDocumento76 páginas1718 Ex E/S: Manual Do UsuárioAndré Andrade RamosAinda não há avaliações
- Elemaq DIPDocumento45 páginasElemaq DIPGustavo AbreuAinda não há avaliações