Você também pode gostar
- FatbasicasDocumento67 páginasFatbasicasGustavo PaivaAinda não há avaliações
- Fatorização LU PDFDocumento7 páginasFatorização LU PDFLeandro SimõesAinda não há avaliações
- Aula02 Fatoração LUDocumento27 páginasAula02 Fatoração LUGersica CristineAinda não há avaliações
- 7-CN Material 04 AutovaloresAutovetoresDocumento17 páginas7-CN Material 04 AutovaloresAutovetoresRodolfo Oliveira de SouzaAinda não há avaliações
- Diagonalização de Matriz - Trabalho GALDocumento6 páginasDiagonalização de Matriz - Trabalho GALIsadora OliveiraAinda não há avaliações
- Algebra Linear: Ortonormaliza C Ao Sistema de Equa C Oes LinearesDocumento38 páginasAlgebra Linear: Ortonormaliza C Ao Sistema de Equa C Oes LinearesfpreisAinda não há avaliações
- Revisão Álgebra LinearDocumento182 páginasRevisão Álgebra LinearEmmanuelAinda não há avaliações
- Reviso de Polinomios PDFDocumento51 páginasReviso de Polinomios PDFThata MarcelinhoAinda não há avaliações
- Exercicios 20hojasDocumento20 páginasExercicios 20hojasrosarosaaAinda não há avaliações
- Lista 1 SimplificadaDocumento3 páginasLista 1 SimplificadarafaelAinda não há avaliações
- Aula1 Simulacao PDFDocumento53 páginasAula1 Simulacao PDFfiorellaAinda não há avaliações
- Matriz Positiva DefinidaDocumento14 páginasMatriz Positiva DefinidaAnthonny Gabryell LimaAinda não há avaliações
- Linsis PDFDocumento10 páginasLinsis PDFdhiegoAinda não há avaliações
- Algebra LinearDocumento15 páginasAlgebra LinearWellington José Leite Da SilvaAinda não há avaliações
- Análise - Notas de Aula PDFDocumento137 páginasAnálise - Notas de Aula PDFAntonio DionisioAinda não há avaliações
- Sistema LinearesDocumento33 páginasSistema LinearesDavidson Leandro Silva dos SantosAinda não há avaliações
- Picme 3 0Documento28 páginasPicme 3 0trocarvisualAinda não há avaliações
- Sme0202 HiperbolicasDocumento3 páginasSme0202 HiperbolicasaaaaaaaAinda não há avaliações
- Dúvidas Da Lista 1 - 230406 - 162543Documento11 páginasDúvidas Da Lista 1 - 230406 - 162543Brendo CostaAinda não há avaliações
- Aula 01 - Debora - LaloDocumento28 páginasAula 01 - Debora - LaloFernando DarsonoAinda não há avaliações
- SIstemas de Equações Lineares - Regra de CramerDocumento6 páginasSIstemas de Equações Lineares - Regra de Cramerorvalhoj13Ainda não há avaliações
- Matrizes e Sistemas de EquaçõesDocumento79 páginasMatrizes e Sistemas de EquaçõesBruna DuarteAinda não há avaliações
- Aula 01Documento24 páginasAula 01Leandro HawkingAinda não há avaliações
- Teorema de PicardDocumento107 páginasTeorema de PicardPoliana da RochaAinda não há avaliações
- Aula 06. Gauss e LduDocumento20 páginasAula 06. Gauss e LduRodrigo CostaAinda não há avaliações
- Resolução 624 Funo - ExponencialDocumento9 páginasResolução 624 Funo - ExponencialFernando FerreiraAinda não há avaliações
- Introd SNLDocumento32 páginasIntrod SNLJania QuadrosAinda não há avaliações
- MetCaract 2122s1Documento11 páginasMetCaract 2122s1Diogo SilvaAinda não há avaliações
- Exercicio-Katrin 03Documento2 páginasExercicio-Katrin 03Fis MatAinda não há avaliações
- 2 Sistema LinearesDocumento59 páginas2 Sistema LinearesRaul GabrielAinda não há avaliações
- Notas de Aula de Análise Funcional - Olivaine S. de Queiroz PDFDocumento141 páginasNotas de Aula de Análise Funcional - Olivaine S. de Queiroz PDFnataliaAinda não há avaliações
- Sol Alg Lin PF M 15 1Documento2 páginasSol Alg Lin PF M 15 1Bruno GuerraAinda não há avaliações
- (Olivâine) Análise Funcional - Notas de AulaDocumento141 páginas(Olivâine) Análise Funcional - Notas de AulaGabriel Rondon100% (1)
- Aula 05Documento25 páginasAula 05Simão OliveiraAinda não há avaliações
- 200.17.60.4 Icet Matematica Geraldo Al1 Aula1Documento13 páginas200.17.60.4 Icet Matematica Geraldo Al1 Aula1Sanielen ColomboAinda não há avaliações
- Aula 1 A 2 CNLDocumento29 páginasAula 1 A 2 CNLElaineAmaralAinda não há avaliações
- 342 765 1 SMDocumento10 páginas342 765 1 SMSaNunesAinda não há avaliações
- Capítulo 1 CDIDocumento14 páginasCapítulo 1 CDIInês CacholaAinda não há avaliações
- Lista de Decomposicao LUDocumento6 páginasLista de Decomposicao LUBruno Soares SilvaAinda não há avaliações
- 2col MD Matematica Vol112Documento104 páginas2col MD Matematica Vol112Deivy Douglas Schuman Ribeiro100% (1)
- Aula 1 An Eis, Ideais e HomomorfismosDocumento3 páginasAula 1 An Eis, Ideais e HomomorfismosguilhermetmttAinda não há avaliações
- Anéis, Ideais e Homomorfismo PDFDocumento3 páginasAnéis, Ideais e Homomorfismo PDFFábio Leandro CruzadoAinda não há avaliações
- Resumou1 PDFDocumento14 páginasResumou1 PDFMaria Inez Cardoso GoncalvesAinda não há avaliações
- Analise No RNDocumento257 páginasAnalise No RNmacpisAinda não há avaliações
- L1 Cal2Documento4 páginasL1 Cal2José Henrique de Mattos DraegerAinda não há avaliações
- Unidade 1 - Lista 01 - Algebra Linear - Matrizes e Sistemas LinearesDocumento3 páginasUnidade 1 - Lista 01 - Algebra Linear - Matrizes e Sistemas LinearestiagozaoAinda não há avaliações
- Lista 1Documento8 páginasLista 1Gabriel QueirozAinda não há avaliações
- Quinta Lista Exercicios Analise Funcional 2009.2 UFPEDocumento7 páginasQuinta Lista Exercicios Analise Funcional 2009.2 UFPEVicente JúniorAinda não há avaliações
- Álgebra Linear - Aula 8 - Sistemas HomogêneosDocumento5 páginasÁlgebra Linear - Aula 8 - Sistemas HomogêneosVitor SilvaAinda não há avaliações
- Aula - 04 - UVV - Métodos Iterativos Na Álgebra Das MatrizesDocumento47 páginasAula - 04 - UVV - Métodos Iterativos Na Álgebra Das MatrizesYan MaximinoAinda não há avaliações
- Zeros Fun CoesDocumento2 páginasZeros Fun CoesPriscila GutierresAinda não há avaliações
- Lista 7 - MmaDocumento3 páginasLista 7 - MmaRenan Ramos de MoraisAinda não há avaliações
- Exame 14 JunhoDocumento2 páginasExame 14 JunhoCamila CarvalhoAinda não há avaliações
- Matematica Discreta Unidade 03 PROFMAT 2012Documento16 páginasMatematica Discreta Unidade 03 PROFMAT 2012anderson_omsAinda não há avaliações
- Sistemas de Equações e Transformações LinearesDocumento48 páginasSistemas de Equações e Transformações LinearesKaroline OliveiraAinda não há avaliações
- Exponencial de Uma MatrizDocumento14 páginasExponencial de Uma MatrizJúlio César MarquesAinda não há avaliações
- Sebenta de MatematicaDocumento78 páginasSebenta de MatematicaricardoAinda não há avaliações
- Lista 3.newDocumento7 páginasLista 3.new4paracompranoaliexpressAinda não há avaliações
- Seção 3.6Documento2 páginasSeção 3.6Ana PaulaAinda não há avaliações
- Lista 1 - ISLDocumento2 páginasLista 1 - ISL4paracompranoaliexpressAinda não há avaliações
- Seção 3.3Documento2 páginasSeção 3.3Ana PaulaAinda não há avaliações
- Lista 1Documento2 páginasLista 14paracompranoaliexpressAinda não há avaliações
- Léo Lins Apresenta: Peste Branca: Impressão em CasaDocumento1 páginaLéo Lins Apresenta: Peste Branca: Impressão em Casa4paracompranoaliexpressAinda não há avaliações
- Aula1 MecanicaDocumento33 páginasAula1 MecanicaCidah SilvaAinda não há avaliações
- Aula1.4 MetodosDemonstracao (Still)Documento60 páginasAula1.4 MetodosDemonstracao (Still)4paracompranoaliexpressAinda não há avaliações
- 2021-06-25T125517.049Documento1 página2021-06-25T125517.049Daniela OliveiraAinda não há avaliações
- 14 SQL DQLDocumento35 páginas14 SQL DQL4paracompranoaliexpressAinda não há avaliações
- 03 Modelo ErDocumento44 páginas03 Modelo Er4paracompranoaliexpressAinda não há avaliações
- Detalhes IBD TP 2Documento6 páginasDetalhes IBD TP 24paracompranoaliexpressAinda não há avaliações
- TP 2Documento1 páginaTP 24paracompranoaliexpressAinda não há avaliações
- Projetos No Método PRINCE2Documento22 páginasProjetos No Método PRINCE2carlosadmgoAinda não há avaliações
- Livro DidaticaDocumento42 páginasLivro DidaticaMarcos MendesAinda não há avaliações
- Contribuicoes Da Analise Do ComportamentDocumento314 páginasContribuicoes Da Analise Do ComportamentBruna CostaAinda não há avaliações
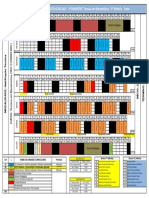
- Avaliacoes de Educacao Visual - 2023Documento3 páginasAvaliacoes de Educacao Visual - 2023Agira MomadeAinda não há avaliações
- Caderno de Orientações Ed Especial Coes 2024Documento72 páginasCaderno de Orientações Ed Especial Coes 2024Gilson Rafael100% (1)
- A Vila Das Cores - Bruno - Magina - Literacias - BEDocumento11 páginasA Vila Das Cores - Bruno - Magina - Literacias - BEluetaAinda não há avaliações
- 11691-Texto Do Artigo-43326-1-10-20190925Documento9 páginas11691-Texto Do Artigo-43326-1-10-20190925alex silvaAinda não há avaliações
- Faculdade de Educação / Uerj Coordenações E Departamentos: Professoras Paula Cid e Luciana VellosoDocumento14 páginasFaculdade de Educação / Uerj Coordenações E Departamentos: Professoras Paula Cid e Luciana VellosoLeonardo KaplanAinda não há avaliações
- Expressões, Vivências e Representações Indígenas-AdnilsonDocumento419 páginasExpressões, Vivências e Representações Indígenas-AdnilsonguttomelloAinda não há avaliações
- Unidades Educação Prisional 31.08.2018Documento2 páginasUnidades Educação Prisional 31.08.2018Léa Rosane BarcelosAinda não há avaliações
- Culto InfantilDocumento27 páginasCulto InfantilRegianyDP100% (3)
- Relatório Cetepi Modelo 2022Documento9 páginasRelatório Cetepi Modelo 2022Matheus GabryelAinda não há avaliações
- Exercício 1 - Questionário (Libras) - Prazo - 15 - 08 - Valor - Atividade Não Pontuada 2Documento6 páginasExercício 1 - Questionário (Libras) - Prazo - 15 - 08 - Valor - Atividade Não Pontuada 2efa soinho67% (3)
- I Simpósio Online de História Dos Ananins Ebook PDFDocumento411 páginasI Simpósio Online de História Dos Ananins Ebook PDFTalytha AlmeidaAinda não há avaliações
- Treinamento de Competências SocioemocionaisDocumento6 páginasTreinamento de Competências SocioemocionaisAna Elisa PiresAinda não há avaliações
- Introdução Á Língua Brasileira de Sinais - Libras PDFDocumento43 páginasIntrodução Á Língua Brasileira de Sinais - Libras PDFJanaina Castelo100% (1)
- 2 Apostila de Matemática Do 2º Ano CIEP 115Documento5 páginas2 Apostila de Matemática Do 2º Ano CIEP 115Fábio SantosAinda não há avaliações
- Máquinas Elétricas 2Documento3 páginasMáquinas Elétricas 2felipe RijoAinda não há avaliações
- LEI 14.254 TDH e DislexiaDocumento1 páginaLEI 14.254 TDH e DislexiaMárcia MárAinda não há avaliações
- Caderno de Apoio À Pratica Pedagógica Nomes Próprios e ListasDocumento24 páginasCaderno de Apoio À Pratica Pedagógica Nomes Próprios e ListasVinícius Adriano de FreitasAinda não há avaliações
- Lei Complementar #420 de 9 de Janeiro de 2008Documento30 páginasLei Complementar #420 de 9 de Janeiro de 2008Rhonascy OdlinorAinda não há avaliações
- Historico Oficial WebDocumento2 páginasHistorico Oficial WebCarlos TavaresAinda não há avaliações
- Aula 2 - Estrutura Dos NucleonsDocumento33 páginasAula 2 - Estrutura Dos NucleonsAlessandro Lara100% (1)
- Tec em Mecatrônica 1 Mod Tarde (TEC V 000003 2021) v6Documento1 páginaTec em Mecatrônica 1 Mod Tarde (TEC V 000003 2021) v6luã bugayAinda não há avaliações
- Pós-Graduação em Gestão de ProjetosDocumento45 páginasPós-Graduação em Gestão de ProjetosMarcos AraújoAinda não há avaliações
- Relatório SESMTDocumento5 páginasRelatório SESMTRelva MariaAinda não há avaliações
- TPM Na LogísticaDocumento19 páginasTPM Na LogísticaBruno MalhãoAinda não há avaliações
- Edital Medicina FACMAR 2024Documento16 páginasEdital Medicina FACMAR 2024karolainy oliveiraAinda não há avaliações
- Aula 2 - Tognetta - A Construção Da Solidariedade e A Educação Do Sentimento Na Escola - Módulo 7 - Turma 18 e 19 - CPSDocumento14 páginasAula 2 - Tognetta - A Construção Da Solidariedade e A Educação Do Sentimento Na Escola - Módulo 7 - Turma 18 e 19 - CPSKaluana Bertoluci BryanAinda não há avaliações
- O Que É Transtorno de Humor - Causas, Sintomas e Tratamento.Documento5 páginasO Que É Transtorno de Humor - Causas, Sintomas e Tratamento.Marco AntonioAinda não há avaliações
- Segurança Da Informação DescomplicadaNo EverandSegurança Da Informação DescomplicadaAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)
- Fundamentos de Cinemática e Dinâmica de MecanismosNo EverandFundamentos de Cinemática e Dinâmica de MecanismosAinda não há avaliações
- Como passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaNo EverandComo passar concursos CEBRASPE -Raciocínio Lógico, Matemática e InformáticaAinda não há avaliações
- Estratégias E Macetes Matemáticos Para ConcurseirosNo EverandEstratégias E Macetes Matemáticos Para ConcurseirosAinda não há avaliações
- Eletricista De ManutençãoNo EverandEletricista De ManutençãoAinda não há avaliações
- A Aprendizagem Cooperativa no Ensino da MatemáticaNo EverandA Aprendizagem Cooperativa no Ensino da MatemáticaNota: 5 de 5 estrelas5/5 (1)
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalNo EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalAinda não há avaliações
- Redes De Computadores DescomplicadasNo EverandRedes De Computadores DescomplicadasAinda não há avaliações